SSVP | Histoire1. Les originesQuelques années seulement après le début des vols spatiaux habités, il est apparu que l'un des points clés pour l'avenir serait la capacité des vaisseaux spatiaux à s'amarrer dans l'Espace. Aux États-Unis comme en Union soviétique, l'objectif était alors de réaliser une mission vers la Lune, ce qui imposait l'utilisation de vaisseaux constitués de plusieurs compartiments, qui devaient être capables de se rejoindre et de se séparer autant de fois que nécessaire. De plus, l'exploitation future de stations orbitales était elle aussi tributaire de la capacité des vaisseaux spatiaux à s'amarrer.  Fig. 1 : Aux États-Unis, la capacité
à amarrer le vaisseau Apollo et son module lunaire En Union soviétique, les premières recherches sur les systèmes d'amarrage spatiaux commencent en 1962 au sein du bureau d'études OKB-1, celui-là même qui a mené à bien les projets de premiers satellites et de premiers vols habités. L'heure est maintenant au nouveau programme de vaisseau spatial polyvalent Soyouz, qui devra impérativement disposer de la capacité à s'amarrer. Dès le mois de mars 1962, un rapport de l'OKB-1 recommande d'utiliser une version modifiée du vaisseau Vostok - celui de Youri GAGARINE - pour réaliser des essais en vol d'un système d'amarrage. Ces vols d'essai ne seraient pas automatisés et nécessiteraient la présence d'un cosmonaute dans chacun des deux vaisseaux réalisant l'amarrage [1]. Le Vostok n'est pas manœuvrable, ce qui signifie qu'une fois que son lanceur l'a placé sur une orbite donnée, il ne pourra pas en changer. Réaliser un essai d'amarrage nécessite donc de lancer le second vaisseau sur une orbite très proche de celle du premier, de manière à ce qu'ils puissent se rencontrer. Quelques mois plus tard, en août 1962, les vaisseaux Vostok-3 et Vostok-4 sont lancés sur ce profil de vol. 
Fig. 2 : Un timbre hongrois montrant les vaisseaux Ils se rapprochent jusqu'à une distance de 6,4km, mais ne disposent évidemment d'aucun système de rendez-vous, et encore moins d'amarrage. En fait, ils ne peuvent même pas mesurer la distance exacte qui les sépare. Néanmoins, la presse soviétique annonce au monde entier que le premier rendez-vous entre deux vaisseaux a été réussi. Bien que de telles affirmations soient exagérées, la mission d'août 1962 est une réelle démonstration de ce que seront les futurs rendez-vous en orbite, qui seront effectués selon le même profil jusqu'à l'avènement des stations orbitales, dans les années 1970. 2. Le premier système d'amarrage soviétiqueToujours en 1962, le département n°333 de l'OKB-1, en charge des problèmes électromécaniques, présente un avant-projet qui ne satisfait pas les ingénieurs du programme Soyouz, notamment à cause de sa grande complexité qui réduit la fiabilité. Ce département, dirigé par Lev VILNITSKI, propose finalement un nouveau système basé sur une tige qui vient s'encastrer dans un cône. Un projet concurrent, proposé par le département de Semion TCHIZHIKOV, est également proposé. Ce projet est l'œuvre d'un ingénieur particulièrement talentueux appelé Stal DENISSOV. 

Fig. 3 : Vladimir SYROMIATNIKOV et Stal DENISSOV. Au printemps 1963, Sergueï OKHAPKINE, qui est l'un des adjoints de Sergueï KOROLIOV à la tête de l'OKB-1, se réunit avec Lev VILNITSKI et son ingénieur en charge du projet, un certain Vladimir SYROMIATNIKOV. Le projet de DENISSOV a l'inconvénient d'être trop complexe : il est constitué de plusieurs sous-systèmes distincts, qui devront être développés par des sections différentes de l'OKB-1. OKHAPKINE choisit donc le projet de SYROMIATNIKOV [2]. Chez les hauts dirigeants de l'OKB-1, cette décision n'a pas l'unanimité. Si Boris TCHERTOK la soutient, Viktor KALACHNIKOV y est totalement opposé. Le projet du système d'amarrage conditionne la réussite du programme Soyouz, et il ne souhaite pas que VILNITSKI le confie à SYROMIATNIKOV, un jeune ingénieur sans expérience [3]. Mais l'avis de KALACHNIKOV n'est pas pris en compte. L'Histoire lui donnera d'ailleurs tort : Vladimir SYROMIATNIKOV s'élèvera petit à petit au rang de spécialiste mondial des systèmes d'amarrage. En 2006, il deviendra Membre correspondant de l'Académie des Sciences. L'un des grands avantages de son système est d'être conçu dès le départ comme indépendant du vaisseau Soyouz. Cela permet de simplifier son intégration, et aussi de rendre les essais plus simples à mener.  Fig. 4 : Schéma simplifié du premier
système d'amarrage : Afin d'augmenter la fiabilité du système, il est décidé de n'utiliser en tout et pour tout qu'un seul moteur électrique. En contrepartie, le mécanisme lui-même est beaucoup plus complexe. En juillet 1963, alors qu'une grande réorganisation de l'industrie soviétique est en cours, la décision est prise en haut lieu de sous-traiter la production du système d'amarrage à l'Usine d'Optique et de Mécanique d'Azov (AOMZ).  Fig. 5 : L'usine AOMZ d'Azov, dans le
sud de la Russie. La phase de conception est terminée au printemps 1964, et l'usine d'Azov peut commencer la production. L'AOMZ est aussi responsable du développement de moyens d'essais au sol du système d'amarrage [4]. A l'automne 1964, SYROMIATNIKOV prend la tête de sa section au sein du département n°333 [5]. A la même période, le premier prototype est terminé et une campagne d'essais de deux semaines est réalisée à Azov. 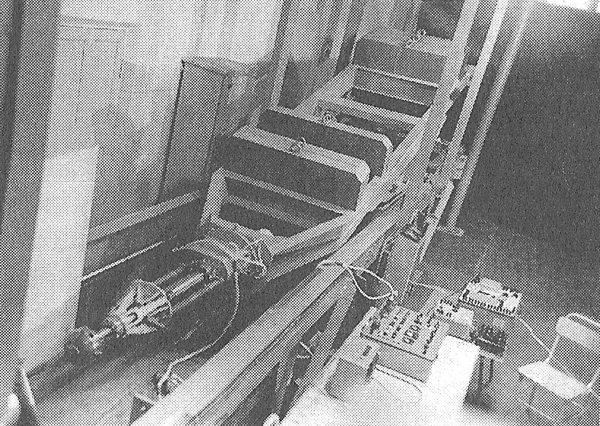 Fig. 6 : Le prototype du système
d'amarrage sur le banc d'essais horizontal de l'AOMZ. Mais des essais plus poussés sont nécessaires, et le prototype est transporté à l'OKB-1, situé dans la ville de Koroliov, près de Moscou. Il est incorporé à un modèle d'essai du vaisseau Soyouz, suspendu à un câble. Afin de diminuer l'effet pendule lors de ces essais, il a fallu utiliser le plus haut bâtiment disponible. Le bâtiment n°39 du NII-88, situé tout près de l'OKB-1 à Koroliov, fera l'affaire : il a une hauteur de plus de 40m, car il avait été construit à l'époque où les Soviétiques pensaient intégrer leurs fusées à la verticale, comme cela se fait aux Etats-Unis. 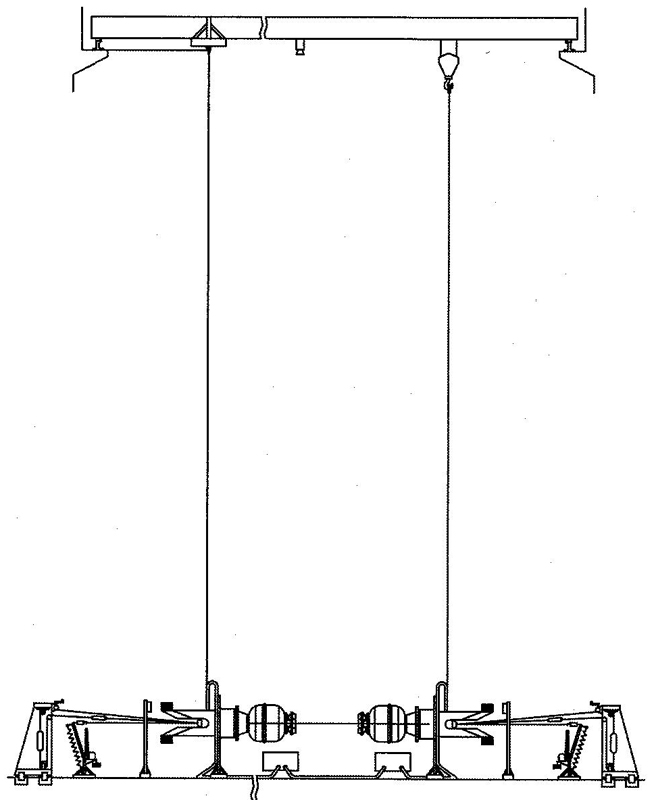 Fig. 7 : Schéma du banc d'essais mis
en place au bâtiment n°39. Toute l'année 1965 est consacrée à des essais et à des modifications du système. Un deuxième prototype, amélioré, est construit à Azov, et l'équipe de SYROMIATNIKOV s'y rend en janvier 1966. Le 14 janvier, Sergueï KOROLIOV, l'emblématique constructeur principal de l'OKB-1, décède sur la table d'opération. VILNITSKI se rend aux funérailles à Moscou, mais le reste de l'équipe continue les essais à Azov. Le travail est tellement important que les équipes se relaient en 3x8 [6]. Deux mois après la mort de KOROLIOV, les Américains réussissent le premier amarrage spatial. Le 16 mars 1966, le vaisseau Gemini VIII, piloté par les astronautes Neil ARMSTRONG et David SCOTT, rejoint sur orbite un étage Agena et établit le contact. 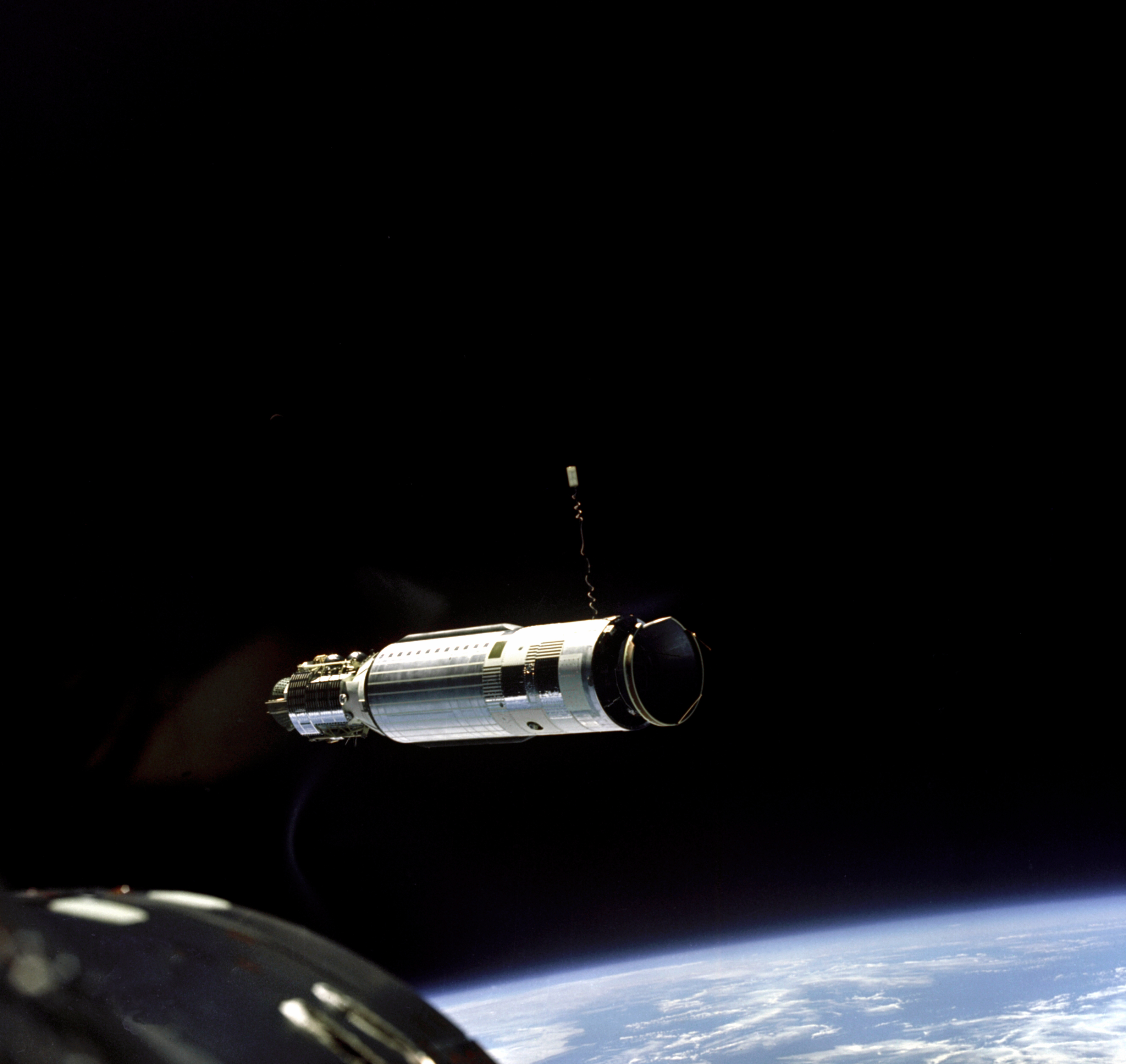 Fig. 8 : L'étage Agena vu de Gemini
VIII. Suite à la disparition de Sergueï KOROLIOV, c'est Vassili MICHINE qui prend les commandes en mai 1966. L'OKB-1 est réorganisé, et il prend le nom de TsKBEM. La première tentative d'amarrage du vaisseau Soyouz doit avoir lieu à la fin de l'année, mais les premiers vols inhabités sont des échecs. Le premier vaisseau ne peut pas effectuer sa mission et il est finalement perdu lors de son retour anticipé, le deuxième explose au sol et tue trois personnes, et le troisième réalise une mission en solitaire pour finalement rater son retour sur Terre. Après ces trois échecs, les Soviétiques prennent quand même la décision de tenter un vol habité. Le cosmonaute Vladimir KOMAROV devait réitérer l'exploit de Gemini VIII en amarrant Soyouz-1 et Soyouz-2, mais la mission échoue et il trouve la mort à l'atterrissage. 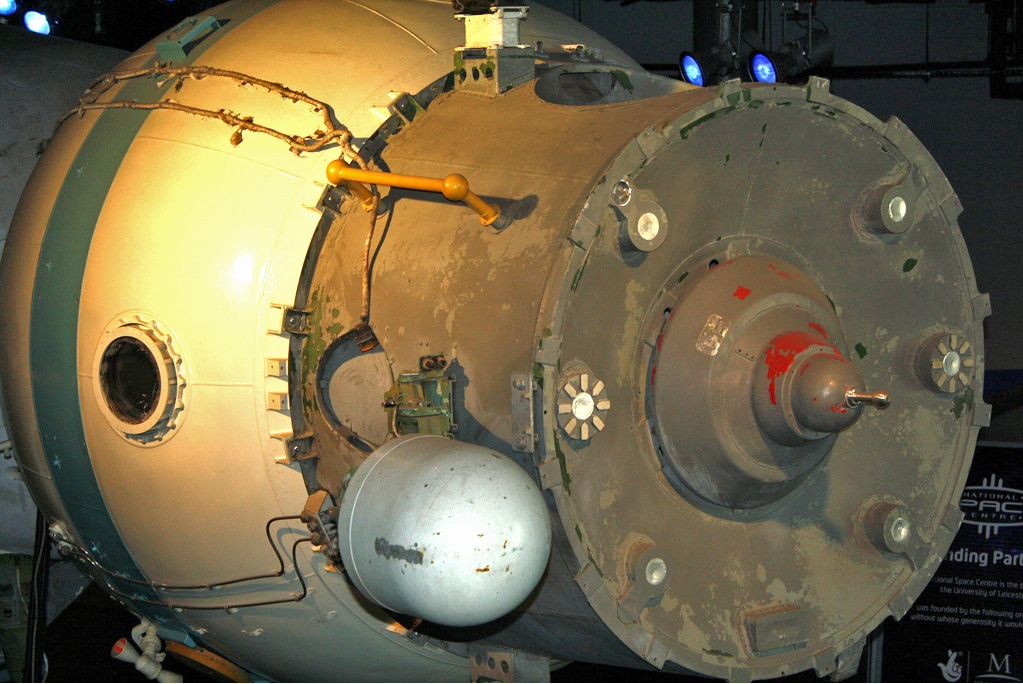 Fig. 9 : Reproduction d'un vaisseau
Soyouz avec Il faudra attendre le 30 octobre 1967 pour que deux vaisseaux Soyouz - baptisés Cosmos 186 et Cosmos 188 - s'amarrent sur orbite. La jonction entre les deux vaisseaux ne s'est pas réalisée correctement, mais les Soviétiques ont réussi le premier amarrage automatique de l'Histoire. La manœuvre est réitérée le 15 avril 1968, cette fois sans accroc, avec les vaisseaux Cosmos 212 et Cosmos 213. L'étape suivante est celle de l'amarrage d'un vaisseau habité. La tâche incombe au cosmonaute de Soyouz-3 Gueorgui BEREGOVOÏ, qui doit rejoindre le vaisseau Soyouz-2, mais il n'y parvient pas. Finalement, en janvier 1969, les vaisseaux Soyouz-4 et Soyouz-5, tous deux pilotés, parviennent à s'amarrer en orbite. Le système développé par l'OKB-1 ne comporte pas d'écoutille, et les cosmonautes doivent sortir dans l'Espace pour passer d'un vaisseau à l'autre. 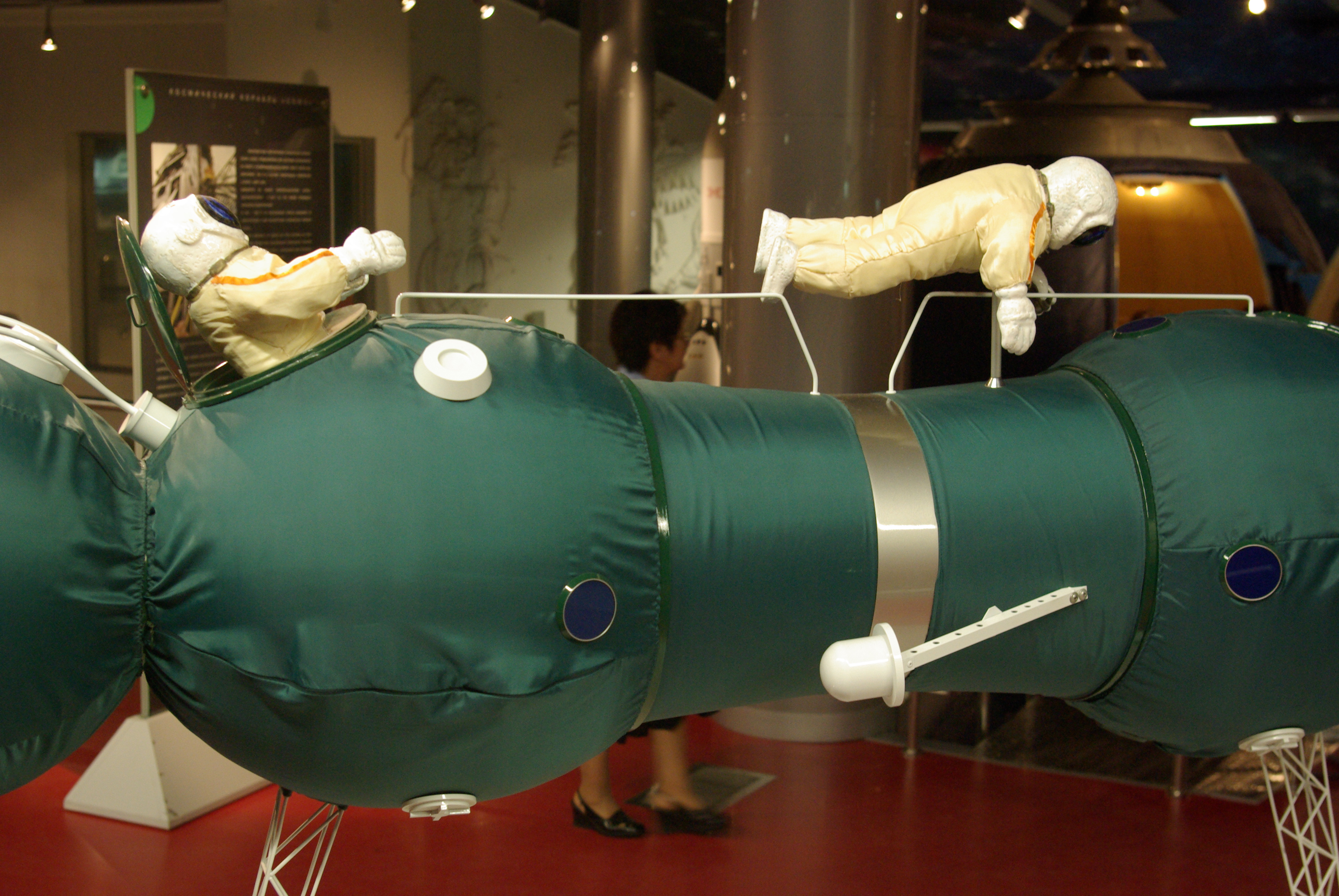
Fig. 10 : Maquette de l'amarrage entre Soyouz-4 et Soyouz-5. Il est clair que, s'ils sont en retard sur les Soviétiques pour les systèmes de rendez-vous automatiques, les États-Unis ont pris une avance considérable dans le domaine des systèmes d'amarrage. Le vaisseau Apollo est en effet doté d'un mécanisme basé lui aussi sur le principe tige-cône, mais il est doté d'une écoutille permettant aux astronautes américains de transiter autant qu'ils le souhaitent entre les deux modules (CSM et LM). 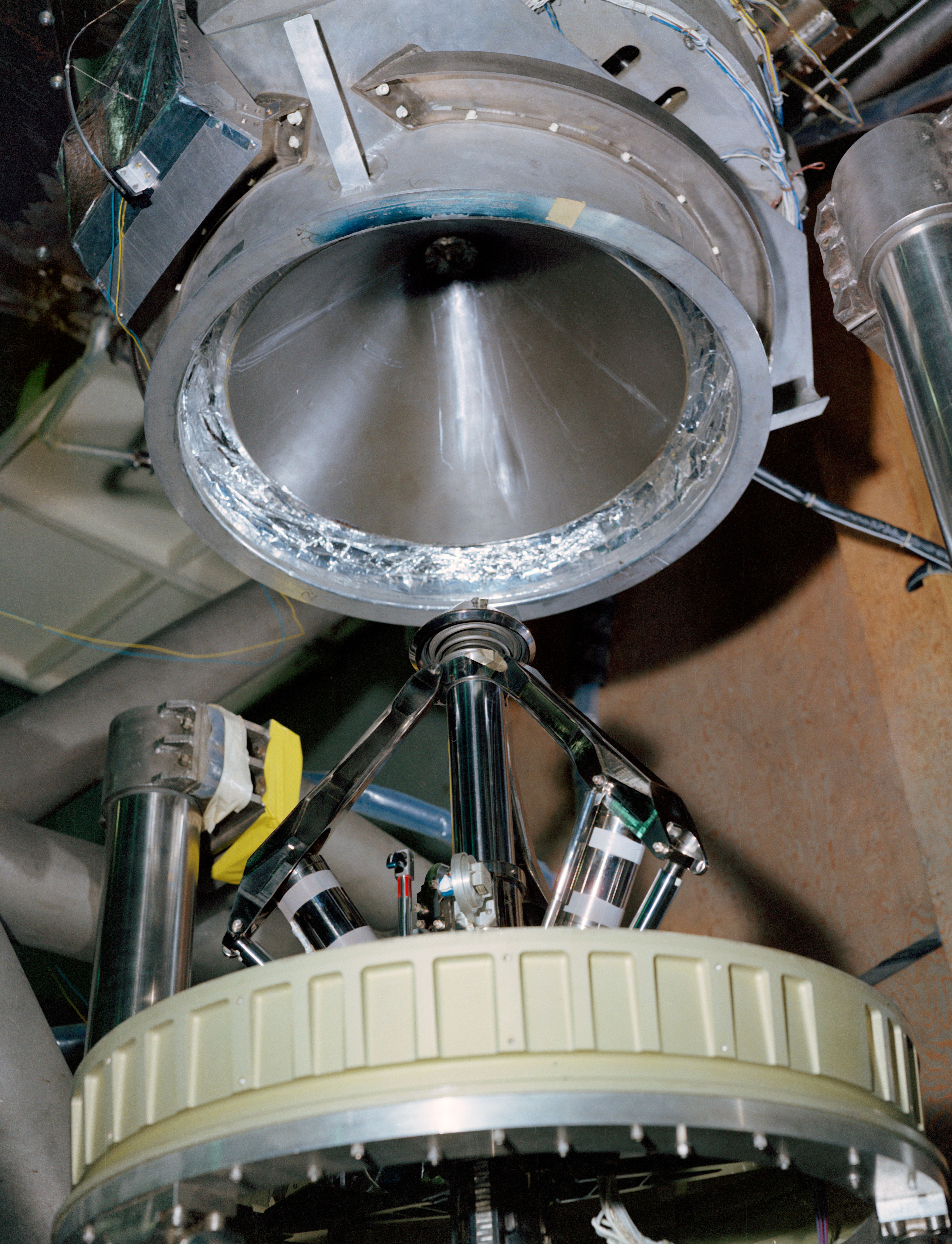
Fig. 11 : Essai au sol du système d'amarrage tige-cône d'Apollo, en 1968. 3. La naissance du SSVPIl est clair que l'absence d'un tunnel de transfert est un grave inconvénient du système d'amarrage du vaisseau Soyouz. Sans lui, passer d'un vaisseau à l'autre nécessite une sortie dans l'Espace aussi complexe que risquée, comme celle qui a été réalisée entre Soyouz-4 et Soyouz-5 en 1969. Le développement d'un système équipé d'un tunnel avait été envisagé par Sergueï KOROLIOV dans le passé. Mais il était destiné au vaisseau lunaire LK, et les contraintes de masse étaient bien trop importantes pour pouvoir ne serait-ce qu'envisager un tunnel. L'idée avait donc été abandonnée [7]. 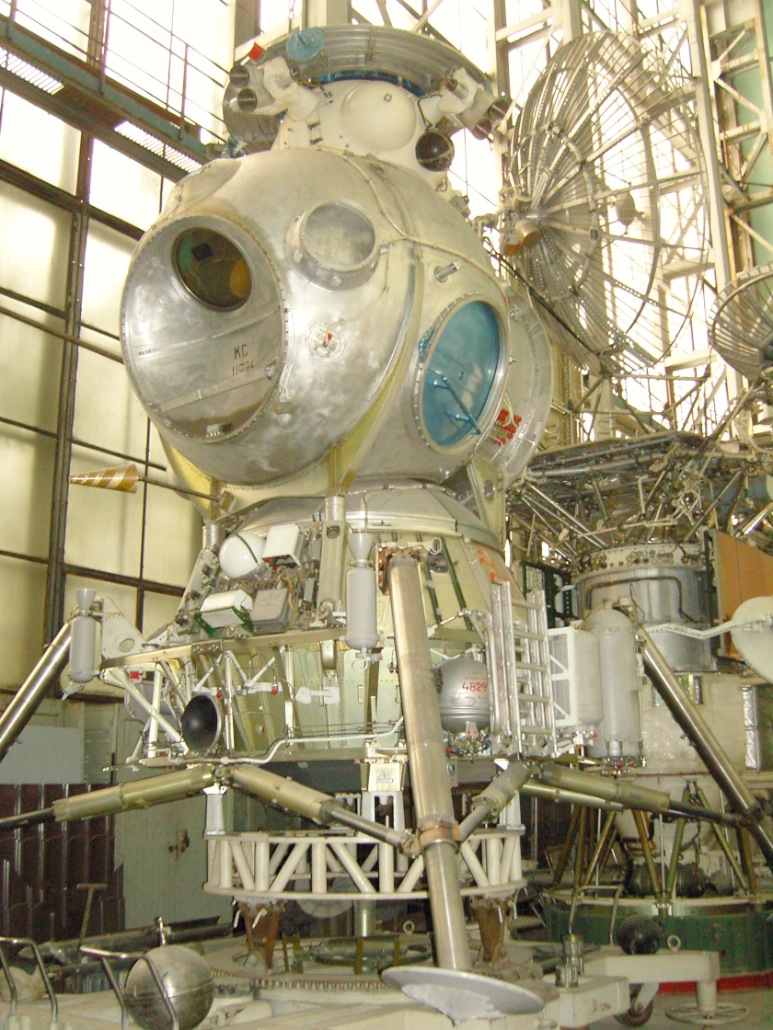 Fig. 12 : Le vaisseau lunaire LK
exposé au MAI. Mais elle resurgit au cours de l'année 1968 : c'est le projet SSVP (Système d'Amarrage et de Transfert Interne), toujours placé sous la direction de Vladimir SYROMIATNIKOV au département n°333. Deux ans après les premières ébauches, en 1970, l'Union soviétique décide de se lancer dans le développement de stations orbitales de longue durée, qui seront desservies par des vaisseaux Soyouz : c'est le projet DOS, conduit par le TsKBEM. Le développement du SSVP devient alors hautement prioritaire, car les cosmonautes devront pouvoir entrer et sortir de leur station orbitale après leur amarrage [8].  Fig. 13 : Le département n°333 en
1970. Il est basé sur le même principe tige-cône que le premier système, mais cette fois il incorpore aussi deux anneaux : l'un disposé sur le vaisseau Soyouz, l'autre sur la station. Après l'amarrage proprement dit, ces anneaux seront solidarisés par un mécanisme spécial, et le système d'amarrage pourra alors être démonté par les cosmonautes, leur permettant de passer du vaisseau à la station. La phase de conception s'achève dès le printemps 1969. La construction débute à la mi-1969 à l'usine AOMZ d'Azov, et les premiers essais au sol du SSVP sont réalisés en 1970 [9]. Cette fois, contrairement à ce qui avait été fait avec le premier système, il est nécessaire de faire des essais dans une chambre à vide, afin de s'assurer de l'étanchéité de la jonction [10]. 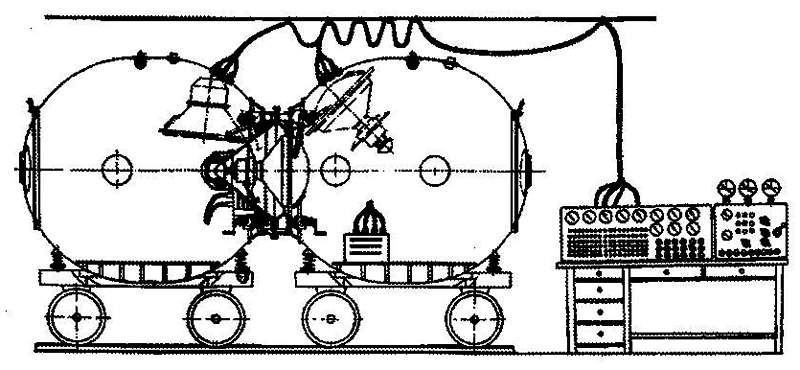 Fig. 14 : Schéma de deux
BO amarrés dans une chambre à vide. A l'automne 1970, le prototype du SSVP est également testé dans le bâtiment n°39 du NII-88, suspendu à des câbles de 40m. Cette fois, il n'y aura pas de répétition générale avec des vaisseaux inhabités. Le premier essai grandeur nature du SSVP sera la première mission vers une station spatiale, et il n'y a donc aucun droit à l'erreur. 4. Quarante ans d'exploitationLa première station orbitale de l'Histoire, baptisée Saliout, est lancée de Baïkonour le 19 avril 1971. Trois jours plus tard, trois cosmonautes décollent à bord de Soyouz-10 pour partir à sa rencontre. 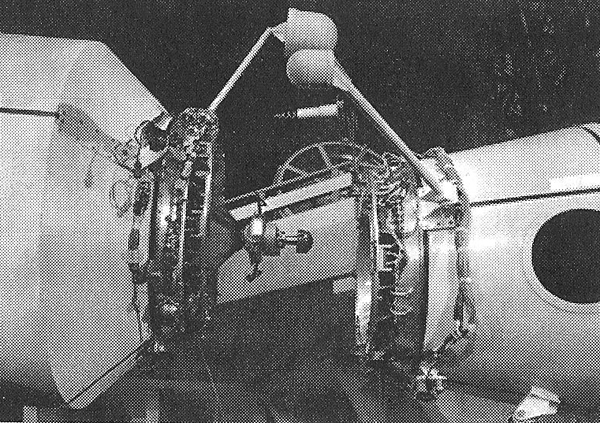 Fig. 15 : Le prototype du SSVP
utilisé lors des essais au NII-88. Le vaisseau arrive en vue de Saliout le 24 avril 1971, et la tige de son système SSVP s'insère dans le cône de la station. La réussite semble acquise, mais la tige refuse de se rétracter complètement, ce qui interdit la jonction complète, et a fortiori l'ouverture du tunnel. Il y a même un risque que le vaisseau reste coincé sur la station, ce qui serait dramatique. L'équipage revient finalement sur Terre sain et sauf, mais sans avoir pu accomplir sa mission : ce premier vol du SSVP est un échec. Au département n°333 de Vladimir SYROMIATNIKOV, des simulations sont réalisées et la télémétrie de Soyouz-10 est analysée. Il s'avère que le SSVP n'est pas directement en cause. Après la capture de la tige dans le cône, les moteurs d'orientation DPO se sont mis en service - alors qu'ils auraient dû être inhibés - et ont tordu la tige, l'empêchant de se rétracter et de finaliser l'amarrage. 
Fig. 16 : Soyouz-10 s'approche de Saliout. Un certain nombre de mesures correctives sont décidées. Quelques semaines seulement après l'échec de Soyouz-10, SYROMIATNIKOV se rend à Azov avec le prototype du SSVP modifié pour réaliser des essais [11]. Le vol suivant, Soyouz-11, est lancé dès le 6 juin 1971. Le lendemain, le vaisseau parvient à s'amarrer sans aucun incident à Saliout. Pour la première fois au monde, une station orbitale va pouvoir être exploitée. Les trois cosmonautes de Soyouz-11, Gueorgui DOBROVOLSKI, Viktor PATSAÏEV et Vladislav VOLKOV passent plus de trois semaines en orbite, et le 29 juin 1971 ils se désamarrent de Saliout, toujours sans le moindre problème. Ils trouveront malheureusement la mort quelques heures plus tard suite à la dépressurisation intempestive de leur vaisseau.  Fig. 17 : Les cosmonautes GRETCHKO et
GOUBAREV examinent le système SSVP Au-delà de l'aspect tragique de cette mission, il s'avère que le SSVP est maintenant au point. Plusieurs autres missions sont réalisées vers les stations Saliout-3, Saliout-4 et Saliout-5, et jamais aucun incident n'est rencontré avec le SSVP. La première station orbitale de deuxième génération, baptisée Saliout-6, est mise en orbite en 1977. C'est le vaisseau Soyouz-25 qui doit mener à bien sa première occupation de longue durée, mais pour la première fois depuis 1971, le SSVP ne fonctionne pas correctement. L'amarrage est impossible, et les cosmonautes KOVALIONOK et RIOUMINE doivent rentrer sur Terre prématurément.  Fig. 18 : Le vaisseau Soyouz TMA-17
en orbite. Ce sera la dernière fois que le SSVP pose problème. Au cours des quatre décennies suivantes, ce système sera utilisé par tous les vaisseaux Soyouz pour rejoindre les stations Saliout-6, Saliout-7, Mir, et la Station Spatiale Internationale. Par rapport aux Saliout, ces deux dernières stations ont l'avantage d'être modulaires. C'est-à-dire qu'elles ont été agrandies en orbite par l'adjonction de plusieurs modules supplémentaires. C'est encore le SSVP qui est utilisé pour relier entre eux les différents modules. 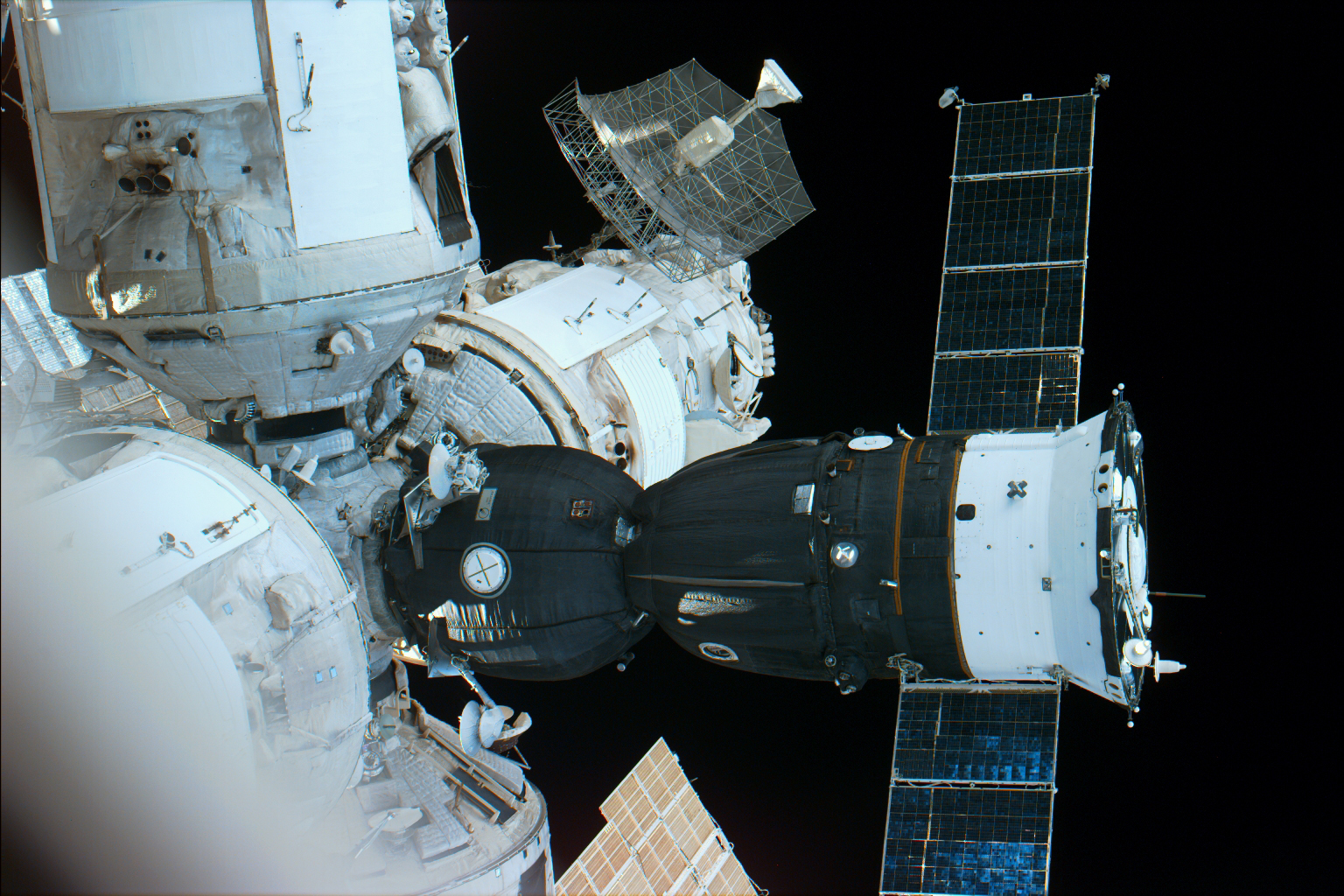 Fig. 19 : Cinq SSVP sur une même
photo. On notera que, le 9 avril 1987, l'amarrage du module Kvant a été problématique du fait de la présence d'un objet étranger dans le SSVP de Mir. Une sortie dans l'Espace a été nécessaire pour permettre l'étanchéité de la jonction. 5. Un SSVP pour ProgressEn 1977, l'Union soviétique se lance dans l'exploitation d'une station orbitale de deuxième génération : Saliout-6. L'une des principales améliorations par rapport aux premières stations DOS est l'ajout d'une seconde pièce d'amarrage SSVP. Elle permettra aux équipages de recevoir des vaisseaux de ravitaillement inhabités pendant que la première pièce d'amarrage est occupée par un vaisseau Soyouz. Le développement de ces vaisseaux de ravitaillement, appelés Progress, a été lancé au TsKBEM en 1973, et le premier vol intervient en janvier 1978. Par rapport au SSVP standard, celui de Progress comprend deux modifications.  Fig. 20 : Progress M-66 s'apprête à
s'amarrer D'une part, il dispose d'une écoutille démontable. Ainsi, en orbite, les cosmonautes disposent de davantage de place pour transférer du matériel entre le Progress et la station. Il faut bien entendu remettre l'écoutille en place avant que le vaisseau ne quitte la station. Un tel aménagement n'est pas possible sur les vaisseaux habités Soyouz, car leur écoutille doit pouvoir être refermée très rapidement dans l'éventualité d'une évacuation d'urgence de la station. D'autre part, les anneaux du SSVP de Progress sont percés pour laisser passer des canalisations. Cela permet de ravitailler les réservoirs d'ergols de la station orbitale. Dans les années 1990, l'Europe s'est lancée dans le développement d'un vaisseau automatique de ravitaillement de la Station Spatiale Internationale, appelé ATV. Comme il doit s'amarrer à un module russe, Zvezda, il doit être équipé d'une pièce d'amarrage compatible. Et c'est ainsi que, depuis 2008, des SSVP décollent également de Kourou, en Guyane ! 6. Le SSVP-M pour ZvezdaDans les années 1990, le TsKBEM - devenu entre temps la société RKK Energiya - se lance dans le développement de Zvezda, le principal module de la future Station Spatiale Internationale (MKS). Globalement, Zvezda est de conception similaire au Module de Base de la station Mir : il est constitué de deux cylindres et d'un compartiment de transfert sphérique, qui donnera accès à d'autres modules.  Fig. 21 : Vue d'artiste de Zvezda en
orbite. A l'avant, Zvezda sera connecté à un autre module russe, appelé Zaria (Fig. 21). Sur la pièce d'amarrage du zénith sera ajoutée la structure NEP, munie d'imposants panneaux solaires. Enfin, sur la pièce d'amarrage nadir (« du dessous ») on trouvera le module USM. Il est clair qu'une masse aussi imposante risquerait de contraindre les mécanismes des SSVP au delà de leurs limites. Les ingénieurs d'Energiya préfèrent développer un système amélioré, appelé SSVP-M, capable de supporter des charges plus importantes. Le SSVP-M est souvent qualifié de système « hybride », car il reprend le mécanisme tige-cône du SSVP classique, mais ses anneaux ont été empruntés à un autre système d'amarrage appelé APAS-89, développé initialement dans le cadre du programme de la navette Bourane [12]. 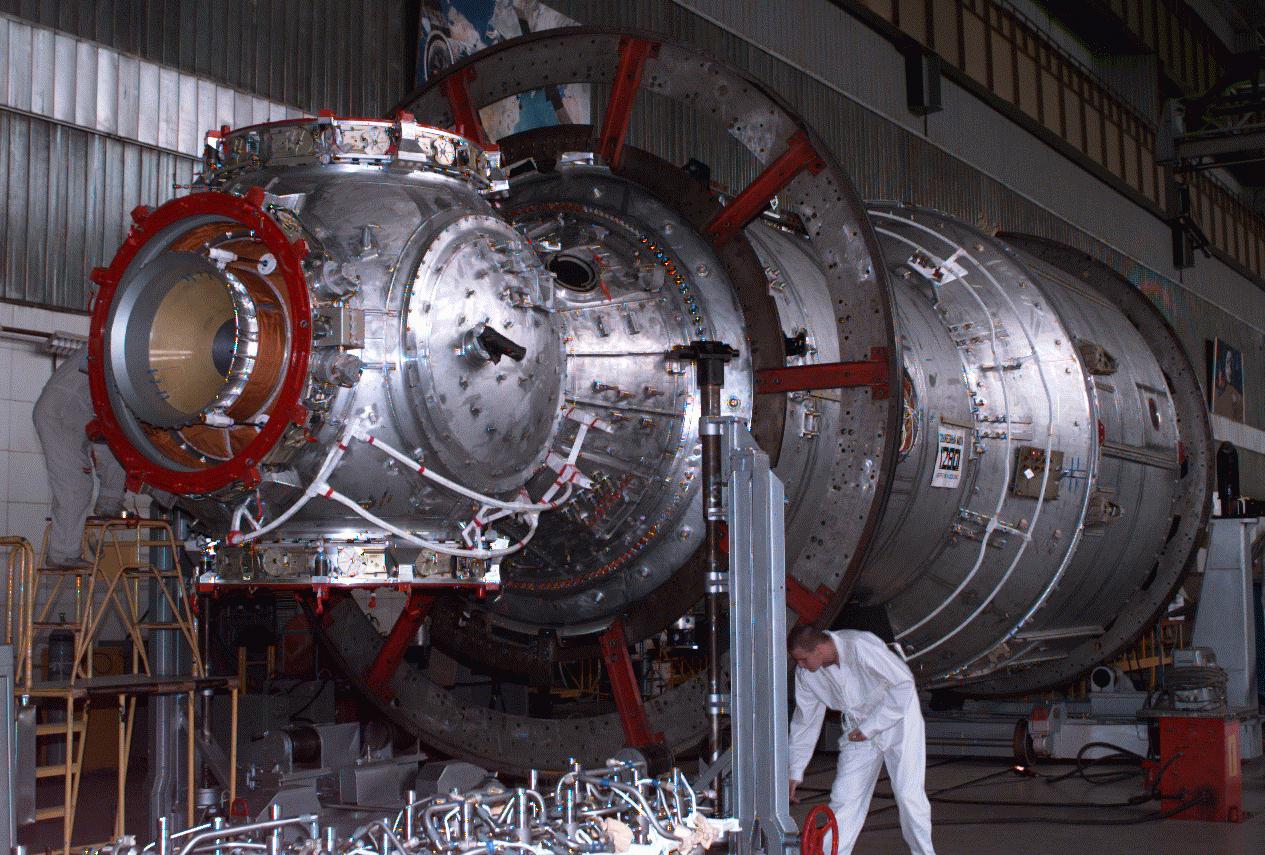 Fig. 22 : Le module Zvezda en
préparation. Finalement, le module USM et la structure NEP ne seront jamais lancés, mais Zvezda est quand même équipé de trois SSVP-M en lieu et place des SSVP standards, ce qui en interdit l'accès aux vaisseaux Soyouz et Progress. En conséquence, Roscosmos doit lancer des petits modules pour servir d'adaptateurs : Pirs et Poïsk. Bibliographie[1] SYROMIATNIKOV, V., 100 Stories about Docking, Vol. 1, p. 160 Dernière mise à jour : 3 septembre 2025 |
|