Soyouz | Rendez-vous et amarrageLe vaisseau Soyouz a été conçu dès son origine pour réaliser des missions d'amarrage, vers un vaisseau similaire ou vers une station orbitale. Pour atteindre cet objectif, il a besoin d'un système de rendez-vous qui lui permet de rejoindre sa cible, et d'un système d'amarrage pour s'y accrocher. 1. Le système d'amarrageLes premiers Soyouz (11F615) étaient équipés d'un système d'amarrage relativement rudimentaire, qui permettait simplement à deux vaisseaux de s'accrocher entre eux. L'équipage n'avait aucun moyen de passer d'un vaisseau à l'autre, excepté via une sortie dans l'Espace (ce qui a été fait entre Soyouz-4 et Soyouz-5 en 1969). 
Fig. 1.1 : Réplique d'un vaisseau Soyouz de première génération (11F615). Avec l'entrée en service des premières stations orbitales DOS, il a fallu développer un système qui permettait non seulement l'amarrage, mais qui était équipé d'une écoutille autorisant les cosmonautes à passer du vaisseau à la station. Ce nouveau système, appelé SSVP, est encore utilisé aujourd'hui pour les missions vers la Station Spatiale Internationale. 
Fig. 1.2 : Vue du système SSVP de Progress M-66. 2. Le système de rendez-vousLes premières versions du vaisseau Soyouz étaient équipées d'un système appelé Igla. Depuis la version Soyouz TM (11F732A51), le système utilisé est le Kours, dont le principal avantage est de ne nécessiter aucune manœuvre de la part de la station orbitale ciblée, qui reste ainsi totalement passive. Ces deux systèmes sont entièrement automatiques et ne nécessitent pas d'intervention humaine, à part pour leur mise en service en début de mission. 3. Le profil de rendez-vous3.1. Premiers rendez-vous orbitauxLes premières expériences de rendez-vous spatiaux ont été réalisées en Union soviétique en 1962 et 1963 avec les vols jumelés Vostok-3/Vostok-4 et Vostok-5/Vostok-6. Lors de ces missions, le second vaisseau était lancé vingt-quatre heures après le premier, au moment où celui-ci repassait au-dessus du cosmodrome de Baïkonour. Vidéo 1 : Animation montrant un rendez-vous orbital de type Vostok. Imaginons que l'orbite du premier vaisseau soit connue avec exactitude, et que la précision du lanceur soit parfaite. Si le second vaisseau est lancé à l'heure exacte où le premier repasse au-dessus du pas de tir, alors il arrivera précisément au même point que lui. Les missions Vostok n'étaient que des « vols groupés ». Les premières véritables tentatives soviétiques de rendez-vous et d'amarrage ont été réalisées par les vaisseaux Soyouz en 1967-1968 (Cosmos 186/Cosmos 188, Cosmos 212/Cosmos 213 et Soyouz-2/Soyouz-3). Pour que le système Igla puisse être opérationnel, il faut que les deux engins soient à moins de 25km de distance. Cette condition repose uniquement sur la précision du lanceur. Or, compte-tenu de la précision du lanceur Soyouz (11A511), la probabilité qu'elle soit vérifiée n'était que de 70% [1]. 3.2. Les rendez-vous en vingt-quatre heures avec les SalioutLes stations orbitales DOS, exploitées à partir de 1971, sont placées sur des orbites plus élevées que l'orbite initiale des vaisseaux Soyouz, de manière à réduire le freinage induit par la haute atmosphère. La conséquence est que les vaisseaux Soyouz ne peuvent plus réaliser de rendez-vous direct comme montré sur la vidéo 1. Ils sont placés sur des orbites plus basses que la station et, par conséquent ils avancent plus vite. Ils vont donc naturellement « rattraper » la station. 
Fig. 3.2.1 : La station orbitale Saliout vue de Soyouz-11. Deux paramètres entrent alors en jeu : l'angle de phase et le temps de mise en œuvre des corrections d'orbite. - L'angle de phase est le retard du vaisseau sur la station. A titre indicatif, pour un Soyouz évoluant sur une orbite à 220km d'altitude et une station évoluant à 400km, la réduction naturelle de l'angle de phase est de 12° par orbite. - L'angle de phase diminue naturellement mais, pour rejoindre l'altitude de la station, le vaisseau Soyouz devra réaliser un certain nombre de corrections d'orbite en utilisant ses moteurs. Chacune de ces corrections devra avoir une durée bien précise, afin d'apporter la variation de vitesse (dV) et, donc, d'altitude recherchées. Or, la préparation de chaque correction demande du temps. Il faut d'abord mesurer l'orbite avec précision grâce à des stations de poursuite (les mesures s'étalent sur quatre orbites, deux avant la correction et deux après), ensuite il faut en déduire par le calcul les paramètres de la correction, puis les charger dans la mémoire du vaisseau (ce qui n'est possible que quand celui-ci est dans une zone de visibilité radio) et, enfin, il faut procéder à la correction en allumant les moteurs. Ce processus devra être répété à chaque correction étant donné que, par définition, une correction modifie l'orbite. Autrement dit, plus on tolère un angle de phase initial élevé, plus il faudra réaliser de corrections d'orbite, et donc plus le temps de vol vers la station sera long. Compte-tenu de la capacité de mesure dont l'Union soviétique dispose dans les années 1970, il est décidé d'utiliser pour les vaisseaux Soyouz un profil de vol sur vingt-quatre heures, qui les conduira à rejoindre les stations Saliout lors de leur dix-septième orbite. Pour qu'un rendez-vous soit possible dans ce laps de temps, l'angle de phase initial doit être inférieur à 90°. Pour obtenir un angle de phase donné au moment du lancement d'un Soyouz, il y a deux moyens :
- calculer l'instant exact du lancement en fonction de l'orbite de la station, Compte tenu des contraintes de planification des lancements, le TsNIIMach coupe la poire en deux : il fixe les lancements de manière optimale et, un mois avant le jour J, ajuste l'orbite de la station. 3.3. Les rendez-vous en quarante-huit heures avec la station orbitale MirEn février 1986 débute la phase d'exploitation de la nouvelle station orbitale soviétique, Mir. Il est prévu de lui ajouter cinq modules additionnels, ce qui la rendra beaucoup plus massive que les DOS, constituées d'un unique module. Du fait de sa masse très importante, environ 130 tonnes après son achèvement, manœuvrer Mir a un coût en ergols beaucoup plus important que pour les DOS. 
Fig. 3.3.1 : La station Mir. Le TsNIIMach décide donc d'abandonner le profil de rendez-vous en vingt-quatre heures et de passer sur un profil en quarante-huit heures, ou trente-quatre orbites. Laisser plus de temps aux vaisseaux Soyouz leur donne plus de flexibilité dans leur corrections d'orbite. Ainsi, ils pourront se satisfaire d'un angle de phase initial de 180° avec Mir. Après le lancement, le TsUP utilise les deux première orbites pour mesurer les coordonnées du vecteur vitesse, calculer les paramètres des deux premières corrections et les transmettre au vaisseau. Les deux premières corrections sont réalisées lors des orbites 3 et 4. Lors des orbites 6 à 11, le vaisseau est hors de visibilité des stations de poursuite (orbites dites sourdes). Les coordonnées du nouveau vecteur vitesse sont mesurées, et les instructions sont calculées puis transmises au vaisseau lors des orbites 12 à 16. La troisième correction est réalisée lors de l'orbite 17. Une nouvelle phase hors visibilité arrive lors des orbites 22 à 27, puis les instructions pour la quatrième correction sont déterminées et transmises lors des orbites 28 à 30. Les nouvelles coordonnées du vecteur vitesse sont transmises lors de l'orbite 32, et l'ordinateur de bord du vaisseau calcule les paramètres des dernières corrections, réalisées de manière automatique. 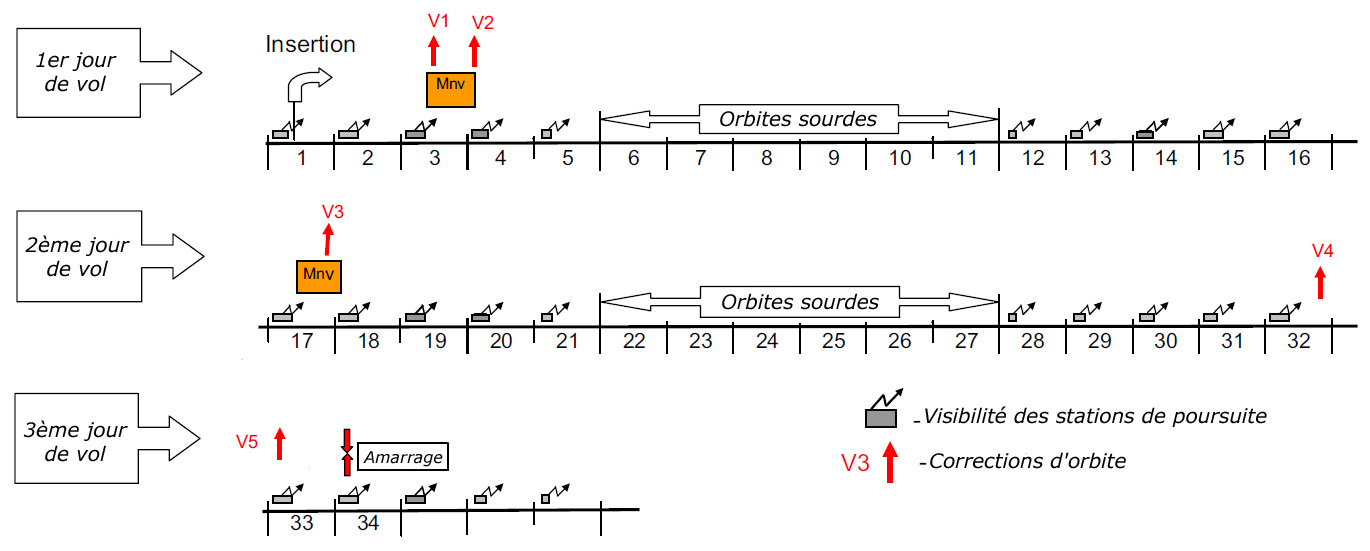
Fig. 3.3.2 : Chronologie du rendez-vous en quarante-huit heures. L'amarrage avec la station peut donc intervenir lors de l'orbite n°34. Le principal inconvénient de cette stratégie est un séjour prolongé pour les cosmonautes dans l'exigu vaisseau Soyouz, qui a des conséquences non négligeables sur leur santé et leur adaptation à la microgravité. Pour les vols Soyouz et Progress vers la Station Spatiale Internationale, dont le premier module est lancé le 20 novembre 1998, la stratégie du rendez-vous en quarante-huit heures est renouvelée. 3.4. Les rendez-vous en quatre orbites avec la Station Spatiale InternationaleEn 2012, deux vaisseaux de ravitaillement, Progress M-16M et Progress M-17M, testent une nouvelle stratégie de rendez-vous avec la Station Spatiale Internationale. Ce nouveau profil leur permet de rejoindre la station lors de leur quatrième orbite, soit moins de six heures après leur lancement. On a dit plus haut que, plus l'angle de phase initial est élevé, plus il faut de temps au vaisseau pour rejoindre la station car il devra effectuer davantage de corrections d'orbite, chaque correction prenant un certain temps. Pour diminuer le temps de vol vers la station, il existe deux méthodes :
1. obtenir un angle de phase initial plus faible, Le TsNIIMach choisit un compromis. D'une part, il calcule les dates de lancement de façon à obtenir un angle de phase initial d'environ 30° (ce qui complique la gestion du planning des vols). D'autre part, il optimise le temps de réalisation des quatre premières corrections d'orbite. 
Fig. 3.4.1 : Le Centre de Contrôle des Vols (TsUP), dans la ville de Koroliov. D'habitude, avant chaque correction, le TsUP mesure l'orbite et charge les instructions dans l'ordinateur de bord du vaisseau. Avec le nouveau profil de vol, les vaisseaux réalisent leurs deux premières corrections sans attendre que le TsUP leur envoie les paramètres de l'orbite initiale : ils se basent donc sur des paramètres théoriques. Le retour d'expérience des lanceurs Soyouz-FG montre en effet que la précision d'injection du vaisseau sur son orbite est excellente, et il n'est donc pas très risqué de considérer les paramètres théoriques comme argent comptant. Pour les deux corrections suivantes, le vaisseau se base sur les paramètres de l'orbite mesurés par le TsUP avant les deux premières corrections. Une fois encore, il n'attend pas les paramètres réels et manœuvre en se basant sur des données théoriques. Cette technique a été utilisée pour la première fois par un vaisseau habité en mars 2013, lors du vol de Soyouz TMA-08M. Si, pour une raison ou une autre, la réalisation de ce profil de vol n'est plus possible, le vaisseau rebascule sur un profil en trente-quatre orbites. 3.5. Les rendez-vous en deux orbites avec la Station Spatiale InternationaleEn 2017, le TsNIIMach et la RKK Energiya mettent au point un nouveau profil de rendez-vous qui permettrait de rejoindre la Station Spatiale Internationale en seulement deux orbites, et sans avoir à se baser sur des paramètres théoriques, ce qui augmenterait la fiabilité des manœuvres. La figure 3.3.2 indique que, pour les rendez-vous en quarante-huit heures, les 33 orbites précédant l'amarrage sont utilisées de la façon suivante :
- 9 pour la mesure des paramètres orbitaux depuis le sol, Or, les vaisseaux Soyouz MS possèdent deux nouveaux systèmes qui leur permettent de gagner beaucoup de temps [1] : - le système de navigation par satellite ASN-K (GLONASS et GPS), qui permet de se passer des mesures réalisées depuis le sol. Cela économise neuf orbites, ainsi que les 12 orbites sourdes, soit un total de 21 orbites. - l'ordinateur de bord TsVM-101, qui est capable de calculer lui-même les paramètres des corrections à partir du vecteur vitesse (donné par l'ASN-K). Cela économise les 3,5 orbites de mesure d'efficacité, ainsi que les 4,5 orbites de calcul et d'envoi des paramètres, soit un total de 8 orbites. Cette capacité a été testée pour la première fois avec le vaisseau Progress M-17M. 
Fig. 3.5.1 : Le vaisseau Soyouz MS-06. Ces nouveaux systèmes permettent donc de supprimer toutes les orbites qui ne sont pas utilisées directement pour la réalisation des corrections d'orbite. L'utilisation du lanceur Soyouz-2-1a, sept fois plus précis que le Soyouz-FG, est toutefois nécessaire. Le nouveau profil qui sera testé en 2018 utilisera ces nouvelles capacités afin de réaliser un rendez-vous en seulement deux orbites. Pour ce faire, deux méthodes existent [3] : - la méthode coplanaire, selon laquelle le vaisseau est placé sur une orbite comprise dans le même plan que celle de la station. L'angle de phase doit alors être compris entre 12° et 18°. - la méthode quasi-coplanaire, où l'orbite initiale n'est pas exactement dans le même plan que celle de la station. Le vaisseau devra réaliser une manœuvre d'ajustement, mais cela permet de relâcher la contrainte sur l'angle de phase, qui pourra être compris entre 0° et 29°. La méthode coplanaire devait être testée pour la première fois par Progress MS-07, mais un incident sur son lanceur Soyouz-2-1a a provoqué un report de son lancement et la manœuvre n'a pas pu avoir lieu, l'angle de phase n'étant plus conforme. L'essai devait être retenté par Progress MS-08, mais un événement similaire est intervenu. C'est donc finalement Progress MS-09 qui inaugure cette technique. Le 14 octobre 2020, Soyouz MS-17 est le premier vaisseau habité à réaliser un rendez-vous en deux orbites. Bibliographie
[1] MOURTAZINE, R., BOUDILOV, S., Short Rendezvous mission for advanced Russian human spacecraft, Acta Astronautica. 67 (2010) 900-909 Dernière mise à jour : 16 janvier 2021 |
|