MKS-26 | Chronologie1. Début de la missionLa vingt-sixième expédition principale vers la Station Spatiale Internationale (MKS) débute le 26 novembre 2010, quand le vaisseau Soyouz TMA-19 revient sur Terre. L'équipage restant à bord de la station est constitué de Scott KELLY, Aleksandr KALIERI et Oleg SKRIPOTCHKA. A ce moment, leur vaisseau Soyouz TMA-M est amarré sur le module Poïsk, Progress M-07M est amarré sur Zvezda et Progress M-08M est amarré sur Pirs. La première grosse activité de la mission est l'installation dans le module Zvezda d'un nouveau système de transmission appelé RSPI (Радиотехническая Система Передачи Информации), qui a été apporté par Progress M-08M. KALIERI et SKRIPOTCHKA commencent l'installation dès le 30 novembre 2010, et cette activité les occupe durant quatre jours, jusqu'au 3 décembre 2010. Le RSPI permettra de transmettre au TsUP des fichiers de données de grande taille. Une antenne sera installée sur la coque de Zvezda lors de la prochaine sortie dans l'Espace (VKD-27). Ensuite, le 3 décembre 2010, SKRIPOTCHKA prépare le système de télévision (TVS) du module Rassviett en vue de l'installation d'une caméra vidéo sur sa pièce d'amarrage passive lors de la prochaine sortie (VKD-27). Cette caméra était précédemment située sur la pièce d'amarrage active, mais elle en avait été démontée lors de la sortie du 15 novembre 2010. Le 10 décembre 2010, KALIERI travaille sur le tableau de bord Neptune-ME du vaisseau Soyouz TMA-M, qui avait connu des dysfonctionnements lors du décollage. 2. Lancement du vaisseau Soyouz TMA-20Le 33ème lanceur Soyouz-FG (11A511U-FG n°Б15000-034) décolle du pas de tir n°5 (17P32-5) de la zone n°1 du cosmodrome de Baïkonour le 15 décembre 2010 à 19h09'24,963" GMT. La charge utile est constituée du vaisseau spatial Soyouz TMA-20 (11F732A17 n°230), qui est placé avec succès sur une orbite basse (200,67km x 253,30km x 51,64°) à 19h18'13" GMT. L'équipage est constitué du commandant Dmitri KONDRATIEV, de l'ingénieur de bord n°1 Paolo NESPOLI et de l'ingénieur de bord n°2 Catherine COLEMAN. Ils vont se joindre à l'équipage actuel de la station, ce qui formera un équipage à six. 
Fig. 2.1 : Décollage de Soyouz TMA-20, 15 décembre 2010. Le vol vers la station se déroule sans incident, et Soyouz TMA-20 s'amarre sur le module Rassviett le 17 décembre 2010 à 20h11'32" GMT. Le rendez-vous est effectué en régime automatique à l'aide du système Kours. Les écoutilles entre les deux vaisseaux sont ouvertes à 21h05 GMT et les six cosmonautes peuvent se retrouver. Le 21 décembre 2010, pendant que KONDRATIEV démonte les deux caméras vidéos KL-152 de Soyouz TMA-20, le centre de Houston lance une série d'essais du SPDM dont le but est de démonter le container CTC-3, situé sur le site 1 (FRAM-1) de la plate-forme ELC2, de le déposer sur la plate-forme de stockage temporaire EOTP, et de le réinstaller sur le site 2 (FRAM-2) de l'ELC2. 
Fig. 2.2 : Essais du SPDM, 21 décembre 2010. Le 22 décembre 2010, à 16h28'00" GMT, les moteurs DPO du vaisseau Progress M-07M sont allumés (dt=1270,7", dV=2,40m/s, dh=4,28km) afin de mettre l'orbite en phase pour les lancements du vaisseau HTV-2 et de la navette Discovery STS-133. Les 336kg ergols nécessaires à cette manœuvre sont pompés directement dans les réservoirs du module Zaria. Le 23 décembre 2010, KALIERI démonte les deux ordinateurs NVM-1 et NVM-2 du système de navigation par satellite ASN-M, situés derrière le panneau n°228 de Zvezda, et les remplace par de nouveaux exemplaires. Les moteurs DPO du vaisseau Progress M-07M sont mis en service le 13 janvier 2011 à 09h00'00" GMT (dt=664", dV=1,39m/s, dh=2,4km) pour réalise rune correction d'orbite. 3. La première sortie dans l'EspaceLa 33ème sortie dans l'Espace réalisée depuis le segment russe de la station internationale (VKD-27) débute le 21 janvier 2011 à 14h28'40" GMT, quand les cosmonautes Dmitri KONDRATIEV (Orlan-MK n°5) et Oleg SKRIPOTCHKA (Orlan-MK n°4) ouvrent l'écoutille VL-1 du module Pirs. Ils commencent par se diriger vers le module Zvezda pour y installer le système SVPI (Система Высокоскоростной Передачи Информации). Celui-ci comprend deux transmetteurs et fait partie du nouveau système de transmission de données à haut débit RSPI. 
Fig. 3.1 : Lieu d'installation du système SVPI. Les deux cosmonautes vont ensuite sur la section de petit diamètre de Zvezda pour connecter le SVPI à un tableau électrique, afin qu'il puisse communiquer avec les équipements internes. Quand ils ont terminé, ils se dirigent vers la plate-forme URM-D, sur le flanc bâbord de la section de grand diamètre de Zvezda. Là, ils démontent les expériences EXPOSE-R et IPI-SM, qui avaient été installées lors de la sortie du 23 décembre 2008. 
Fig. 3.2 : Schéma montrant l'emplacement de l'URM-D. Une fois désolidarisées de l'URM-D, ces expériences ne seront plus alimentées en énergie, et il faut donc les envelopper dans une couverture thermique pour pallier l'absence de refroidissement. 
Fig. 3.3 : Photo non datée de l'URM-D. Ils ramènent les deux expériences dans le sas du module Pirs, où ils récupèrent la caméra vidéo KL-153. Celle-ci était précédemment montée sur la pièce d'amarrage active du module Rassviett, mais elle avait été retirée lors de la sortie du 15 novembre 2010 car cette pièce d'amarrage ne sera jamais plus utilisée, maintenant que Rassviett est à bon port. Lors de cette même sortie, les cosmonautes devaient réinstaller la caméra sur la pièce d'amarrage passive, qui reçoit des vaisseaux Soyouz et Progress, mais ils n'en avaient pas eu le temps. Aujourd'hui, KONDRATIEV et SKRIPOTCHKA vont donc devoir réaliser cette activité. 
Fig. 3.4 : Nouvel emplacement de la caméra d'amarrage sur Rassviett. Ils se rendent donc avec leur caméra jusqu'à l'extrémité de Rassviett. Ils utilisent une sorte de couteau pour ôter la couche de protection thermique qui avait empêché l'installation de la caméra le 15 novembre 2010. Ils peuvent ensuite placer la caméra sur un connecteur précâblé. Les deux cosmonautes rentrent ensuite dans le sas et ils ferment l'écoutille VL-1 à 19h51 GMT. La sortie a duré 5h22. 4. Arrivée des vaisseaux HTV-2 et Progress M-09MLe deuxième vaisseau de ravitaillement japonais décolle du centre spatial de Tanegashima le 22 janvier 2011 à 05h37'57" GMT. Le lanceur H-IIB place l'HTV-2 sur orbite avec succès à 05h53'11" GMT. Le 24 janvier 2011 à 00h42'43" GMT, le vaisseau Progress M-08M se sépare du module Pirs. Le vaisseau HTV-2 arrive en vue de la station le 27 janvier 2011. A 11h39 GMT, NESPOLI et COLEMAN le saisissent avec le bras Canadarm2, puis l'amarrent sur le nadir du module Harmony à 14h51 GMT. 
Fig. 4.1 : Arrimage de l'HTV-2 sur Harmony, 27 janvier 2011. Immédiatement après l'amarrage, les astronautes relâchent le Canadarm2 de l'HTV-2 et saisissent son container EP (Exposed Pallet) afin d'être prêts à le transférer. L'EP est situé dans le Compartiment Logistique Non pressurisé ULC (Unpressurized Logistics Carrier). Les cosmonautes pénètrent dans le vaisseau japonais le jour même à 20h47 GMT. Ils font basculer son alimentation électrique des batteries internes (non rechargeables) vers le réseau du segment américain de la station. A l'aide d'un capteur russe, ils vérifient également la qualité de l'atmosphère. Le vaisseau Progress M-09M décolle de Baïkonour le 28 janvier 2011 et il s'amarre sur le module Pirs le 30 janvier 2011 à 02h38'48" GMT. Le 31 janvier, les cosmonautes transfèrent deux armoires scientifiques de l'HTV-2 vers le module Kibo : le MSPR et le Kobairo (GHF). COLEMAN et NESPOLI extraient le container EP le 1er février et le transmettent au bras japonais JEMRMS. Celui-ci, piloté par KELLY, le dépose sur la plate-forme externe du module Kibo (JEF). 
Fig. 4.2 : Le JEMRMS installe l'EP sur la JEF, 1er février 2011. Le container EP abrite deux équipements : un coupleur flexible FHRC (système permettant d'amener de l'ammoniac dans les radiateurs photovoltaïques américains) et un container CTC (le CTC-2). Ils doivent tous deux être installés sur la plate-forme de stockage ELC4, qui sera apportée par la navette Discovery STS-133 d'ici quelques semaines (le FHRC sera sur le point d'attache FRAM-5 et le CTC-2 sur le FRAM-1). En attendant, ils vont être placés temporairement sur la petite plate-forme EOTP du manipulateur Dextre. Ces opérations démarrent le 2 février 2011. Notons qu'il s'agit là de la première utilisation opérationnelle de Dextre, apporté sur la station lors de STS-123 en mars 2008. Le 2 février, le bras Canadarm2 quitte le point d'ancrage PDGF du module Harmony, où il était positionné pour pouvoir saisir le HTV-2, pour aller s'accrocher au PDGF-3 du système mobile MBS, situé à cet instant sur le segment S0 (site WS5). Le MBS emmène alors le Canadarm2 vers le segment P1 (site WS7). Là, il saisit le Dextre, qui était aussi sur le MBS, et le prépositionne à proximité du container EP. Le 3 février, le bras n°1 de Dextre saisit le FHRC et le place sur le côté n°2 de l'EOTP. Ensuite, le bras n°2 saisit le CTC-2 et le passe au bras n°1. Et c'est ici qu'il restera. Les ingénieurs américains préfèrent avoir un seul matériel sur l'EOTP, et un autre sur l'un des deux bras, afin de mieux répartir la puissance électrique nécessaire à leur contrôle thermique. 
Fig. 4.3 : Le Dextre en plein travail, 3 février 2011. Le container EP est remis dans le compartiment non pressurisé de l'HTV-2 le 7 février, toujours en utilisant le JEMRMS et le Canadarm2. Toujours le 7 février, Aleksandr KALIERI se lance dans un travail d'envergure sur le système de régulation thermique (SOTR) du module Zvezda. Il démonte les pompes N1 et N2 du groupe 4SPN2 (sur la boucle KOB2) et installe de nouveaux exemplaires. Les moteurs DPO du vaisseau Progress M-07M sont mis en service le 9 février 2011 à 21h37'30" GMT (dt=252", dV=0,5m/s, dh=900m) pour mettre l'orbite en phase pour le lancement de Discovery STS-133 et le retour de Soyouz TMA-M. KALIERI s'occupe le 12 février 2011 de remplacer le système informatique TVU du module Poïsk. C'est un dysfonctionnement dans ce système qui avait provoqué l'incident lors de la séparation de Soyouz TMA-18. 5. La seconde sortie dans l'EspaceLa 34ème sortie dans l'Espace réalisée depuis le Segment russe (VKD-28) débute le 16 février 2011 à 13h29'30" GMT, quand les cosmonautes Dmitri KONDRATIEV (Orlan-MK n°5) et Oleg SKRIPOTCHKA (Orlan-MK n°4) ouvrent l'écoutille VL-1 du module Pirs. Leur première activité consiste à installer l'instrument Foton-Gamma, qui fait partie de l'expérience Molnia-Gamma, sur la face nadir de la Plate-forme de Travail Universelle (URM-D) située sur le flanc tribord de Zvezda. 
Fig. 5.1 : L'instrument Foton-Gamma. Il faut ensuite ôter les morceaux de couverture isolante qui protégeaient l'instrument, et tirer un câble pour le connecter au tableau FP-2 de Zvezda. 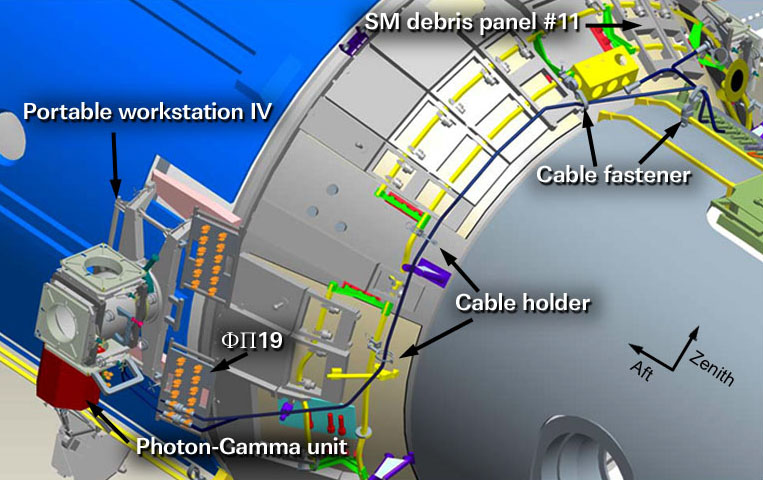
Fig. 15 : Schéma du câble de connexion de l'instrument Foton-Gamma. Les deux cosmonautes reviennent ensuite dans le module Pirs pour y déposer les couvertures isolantes de Foton-Gamma et y récupérer l'instrument RK-21-8, qui fait partie de l'expérience SVTch-Radiometria. Ils vont l'installer sur l'autre Plate-forme de Travail Universelle (URM-D), celle située sur le flanc bâbord de Zvezda. Ils fixent le RK-21-8 au moyen d'un adaptateur spécifique, puis ils déploient ses antennes. 
Fig. 17 : L'adaptateur pour le RK-21-8. 
Fig. 18 : L'instrument RK-21-8. Les deux dernières activités consistent à aller démonter un cale-pieds Yakor sur le flanc nadir de la section de grand diamètre de Zvezda, ainsi que deux panneaux expérimentaux Komplast (n°2 et n°10) à l'arrière du module Zaria. 
Fig. 19 : L'arrière du module Zaria, avec ses panneaux Komplast. Ces panneaux abritent des matériaux dont on étudie le comportement lorsqu'ils sont exposés au vide spatial. Les cosmonautes les ramènent dans le sas dans un container spécial, et ils referment l'écoutille à 18h21 GMT. La sortie aura duré 4h51. 6. Arrivée du vaisseau ATV-2Le deuxième vaisseau de ravitaillement européen, l'ATV-2 « Johannes Kepler », décolle du Centre Spatial Guyanais au sommet du lanceur Ariane 5 ES L544 (Vol 200) le 16 février 2011 à 21h50'55" GMT. 
Fig. 20 : Lancement de l'ATV-2, 16 février 2011. Les Étages d'Accélération à Poudre (EAP) sont largués à H0+142,4", et le moteur Vulcain 2 de l'Étage Principal Cryotechnique (EPC) est arrêté à H0+531,8". L'Étage à Propergols Stockables (EPS) est allumé à H0+544,8" et éteint à à H0+1037,0" (phase EPS1). S'en suit alors une phase balistique de 42 minutes, puis l'EPS est allumé une deuxième fois à H0+3568" pendant 28 secondes (phase EPS2). L'ATV se sépare de l'EPS à 22h54'48" GMT, alors qu'il se trouve sur une orbite quasi-circulaire 254,9km x 264,2km x 51,6°. Immédiatement après sa mise sur orbite, l'ATV-2 déploie ses quatre panneaux solaires. Au moment de sa séparation de l'EPS, le vaisseau ATV-2 « Johannes Kepler » a une masse totale de 19712kg, dont 7091kg de cargaison. Comme il était relié à l'EPS par un adaptateur SDM (Separation and Distancing Module) d'environ 300kg, la performance totale demandée au lanceur Ariane 5 ES était de 20060,5kg.
La cargaison de l'ATV-2 a une masse supérieure de 2534kg à celle de l'ATV-1. En effet, la performance du lanceur Ariane 5 ES a été améliorée de 700kg (400kg en utilisant des EAP à viroles soudées et 300kg en optimisant la trajectoire de l'EPS) et les racks de stockage du vaisseau ont été allégés de 300kg. De plus, ce deuxième exemplaire n'effectuera pas une approche de la station aussi complexe que son prédécesseur, ce qui permet d'économiser 1t d'ergols pour les besoins propres. Enfin, suite au retour d'expérience de l'ATV-1, la trajectoire d'approche de la station a été optimisée, ce qui a permis d'économiser encore 500kg d'ergols. Pendant ce temps, le 18 février 2011, NESPOLI et COLEMAN utilisent le bras Canadarm2 pour déplacer le vaisseau japonais HTV-2 du nadir d'Harmony vers son zénith. Pour que les opérations liées à ses charges externes soient possibles avec le Canadarm2, le HTV doit être au nadir. Or, dans cette position, il gênera l'accès à la soute de Discovery lors de la prochaine mission STS-133. Il est donc positionné temporairement au zénith. 
Fig. 21 : Positionnement du vaisseau HTV-2 au zénith d'Harmony, 18 février 2011. Le vaisseau Progress M-07M se sépare du module Zvezda le 20 février 2011 à 13h11'47" GMT. Il libère ainsi la place pour le vaisseau ATV-2. Le 23 février, KALIERI démonte le TVU du module Rassviett et le remplace par un nouvel exemplaire, comme il l'avait fait dans le module Poïsk le 12 février. L'ATV-2 arrive en vue de la station le 24 février. Il arrive au point S-1/2 à 11h37 GMT et les communications directes sont établies à l'aide de ses antennes PL2 et PL3. Le centre de contrôle de Toulouse rencontre un incident technique qui entraîne la perte de la capacité à vérifier la pertinence des calculs de l'ordinateur de bord du vaisseau. Comme le centre de Houston possède cette capacité en secours, il est décidé de poursuivre les opérations de rendez-vous. Le vaisseau européen gagne ensuite le point S1 à 12h23 GMT, le S2 à 13h09 GMT et le S3 à 14h21 GMT. Alors qu'il s'y trouve encore, l'écran Simvol du module Zvezda tombe en panne. Le TsUP parvient à le remettre en service rapidement, mais la chronologie a pris environ 15 minutes de retard. 
Fig. 22 : L'ATV-2 lors de son approche finale, 24 février 2011. L'ATV-2 gagne le point S4 à 15h30 GMT et le S41 à environ 15h50 GMT. Il s'amarre finalement au module Zvezda le 24 février 2011 à 15h59 GMT. Les verrous côté ATV sont fermés à 16h06'25" GMT et ceux côté station sont fermés à 16h08'10" GMT. 7. Arrivée de la navette spatiale Discovery STS-133Le succès de l'amarrage de l'ATV-2 « Johannes Kepler » donne le feu vert au lancement de la navette spatiale américaine Discovery STS-133, qui décolle de Cap Canaveral pour le vol ULF-5 le 24 février 2011 à 21h53'24,016" GMT. L'équipage est constitué du commandant Steven LINDSEY, du pilote Eric BOE et des spécialistes de mission Alvin DREW, Stephen BOWEN, Michael BARRATT et Nicole STOTT. Les deux charges utiles principales de la mission sont le nouveau module de stockage PMM et la plate-forme externe ELC4. 
Fig. 7.1 : Dernier décollage de Discovery, 24 février 2011. Pendant que Discovery approche de la station, deux des moteurs OCS de l'ATV-2 sont allumés le 25 février à 10h33 GMT (dt=198", dV=0,5m/s, dh=0,86km). Le but est de mettre l'orbite en phase pour le lancement de Soyouz TMA-21 et l'atterrissage de Soyouz TMA-M. Plus tard dans la journée, à 16h06 GMT, les cosmonautes ouvrent les écoutilles donnant sur l'ATV-2. Toujours le 25 février, Scott KELLY procède à la pressurisation du PMA-2, par où la navette Discovery va accoster. Par ailleurs, KALIERI range le système de contrôle de l'ATV qui avait été installé dans Zvezda pour l'amarrage. Le poste PCE Z0000 est stocké derrière les panneaux 225 et 226 du module Zaria. 
Fig. 24 : Discovery approche de la station, 26 février 2011. Discovery STS-133 s'amarre au PMA-2 le 26 février 2011 à 19h14 GMT. Il y a maintenant douze personnes à bord du complexe orbital. La première priorité est de transférer la plate-forme ELC4 de la soute de la navette vers son emplacement définitif sur le segment S3 de la poutre centrale ITS. Les plates-formes ELC1 et ELC2 avaient été amenées par la navette STS-129 en novembre 2009. La dernière de la série, ELC3, sera apportée par la mission suivante, STS-134. D'autre part, la station dispose de trois autres plates-formes de type ESP. 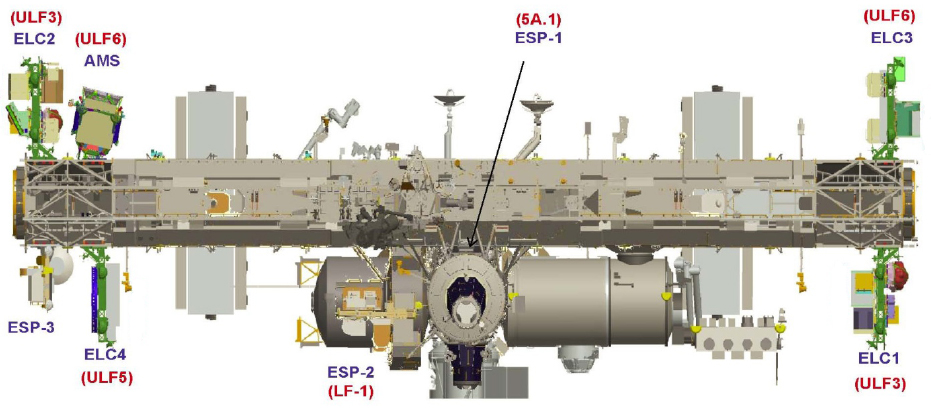
Fig. 25 : Disposition définitive des différentes plates-formes de stockage sur l'ITS. L'ELC4 n'abrite pour l'instant qu'un seul matériel : un radiateur photovoltaïque déployable du sous-système d'évacuation de la chaleur HRS (Heat Rejection Subsystem), qui fait partie du système de régulation thermique EATCS (External Active Thermal Control System). Plusieurs de ces radiateurs sont actuellement déployés, et celui qu'amène l'ELC4 servira de pièce de rechange en cas de problème avec l'un d'eux. L'installation de l'ELC4 sur le S3 demande une manœuvre relativement complexe. Tout d'abord, à 23h08 GMT, le bras Canadarm2 de la station, accroché au module Harmony, saisit la plate-forme dans la soute. Il la transmet ensuite au bras RMS de Discovery, qui la saisit à 00h08 GMT le 27 février. Vidéo 1 : Animation montrant l'installation de l'ELC4. Le Canadarm2 peut alors lâcher l'ELC4 et à 00h55 GMT il va s'accrocher sur le point d'ancrage PDGF-1 de la plate-forme mobile MBS, sur la poutre ITS. Son autre extrémité se détache d'Harmony, saisit l'ELC4 et l'emmène jusque sur le point d'attache PAS4 du segment S3. 
Fig. 26 : Le Canadarm2 (à droite) s'apprête à saisir l'ELC4, La première sortie dans l'Espace de STS-133 débute le 28 février 2011 à 15h46 GMT, quand les astronautes Stephen BOWEN et Alvin DREW passent leurs scaphandres EMU sur batteries internes. Leur première activité consiste à installer une rallonge pour un câble appelé J612, qui relie le module Unity au sas Quest. Il avait été mis en place durant la sortie du 15 juillet 2001, lors de l'installation de Quest par la mission STS-104. Son rôle est d'assurer l'alimentation électrique de certains réchauffeurs de Quest. Or, une fois que le nouveau module PMM sera arrimé à Unity, le J612 ne sera plus accessible, ce qui rendra d'éventuelles opérations de maintenance extrêmement délicates. Le but est donc de le prolonger afin de pourvoir le faire contourner la pièce d'amarrage du PMM. Cette activité était au programme de la sortie du 16 août 2010, mais n'avait pu être réalisée faute de temps. 
Fig. 27 : Vue du dessous du segment américain. BOWEN commence donc par débrancher le câble côté Unity, et à sa place il branche la rallonge. DREW connecte ensuite la rallonge au J612, et le tour est joué. Les astronautes n'ont plus qu'à attacher le câble le long de Unity, et ils peuvent passer à l'activité suivante. Celle-ci consiste à rapatrier sur la plate-forme ESP-2 le module de pompe (PM, Pump Module) qui était tombé en panne le 31 juillet 2010, puis stocké temporairement sur le point d'ancrage POA lors de la sortie du 11 août 2010. BOWEN monte sur le Canadarm2 au moyen d'un cale-pieds APFR qu'il a trouvé sur l'ESP-2, il se dirige vers le POA, saisit le PM défaillant et le ramène sur l'ESP-2. Là, il le range dans un casier (FSE) et le fixe au moyen de quatre boulons. Il doit également démonter l'attache AGB qui avait permis d'accrocher le PM au POA (il la fixe sur le FHRC qui est présent sur l'ESP-2 depuis son lancement). 
Fig. 28 : Alors qu'il est en route vers le POA, BOWEN passe devant Discovery, Le transfert à l'aide du Canadarm2 prend plus de temps que prévu, car son poste de pilotage (RWS), situé sous la Cupola, tombe en panne, et les astronautes doivent donc utiliser le poste de secours dans le module Destiny. Pendant que BOWEN réalisait son aller-retour, DREW s'est rendu sur le charriot CETA situé à bâbord, et il a récupéré une soupape d'évent qu'il ramène à son tour sur l'ESP-2. Elle sera utilisée lors de la prochaine sortie. Quand tout cela est terminé, BOWEN descend du bras. 
Fig. 29 : BOWEN sur le Canadarm2, 28 février 2011. L'activité suivante consiste à aller sur l'élément Z1 pour y récupérer le cale-pieds APFR n°4. Celui-ci a la particularité d'être le dernier APFR présent sur la station à être équipé d'une protection thermique qui l'empêche d'être installé à certains endroits. Il faut donc le ramener à l'intérieur de la station pour lui ôter cette protection. Seul problème : un support d'outils TS (Tool Stanchion) est fixé sur l'APFR n°4. DREW emmène donc avec lui un autre APFR, qu'il trouve sur l'ESP-2, et l'installe sur le flanc bâbord du Z1. Il démonte le TS et le remonte sur cet APFR, libérant ainsi l'APFR n°4. Il peut alors démonter l'APFR n°4. Avant d'aller le déposer dans le sas, il ouvre le couvercle de deux compartiments qui contiennent en tout quatre modules électriques RPCM, de manière à permettre l'accès au robot SPDM en cas de besoin. 
Fig. 30 : Reproduction des RPCM du Z1, avec les couvercles ouverts. Sur le segment S1, une caméra (CP3) est maintenant trop proche de la plate-forme ELC4 qui vient d'être installée, ce qui posera problème dans l'avenir. Il faut donc déplacer la caméra (montée sur un mât) et la tourner un peu pour laisser suffisamment de place autour de l'ELC4. Pour pouvoir fixer la caméra, les astronautes doivent d'abord installer un petit support. Ils vont ensuite à l'extrémité du S3 pour installer deux butées qui bloqueront l'accès aux charriots CETA. Avec cette protection, ceux-ci pourront donc maintenant se rendre jusqu'au bout du S3. 
Fig. 31 : Les différentes butées sur lesquelles les astronautes ont travaillé. Pendant qu'ils sont sur le S3, ils débloquent deux crans d'arrêt qui servaient à bloquer le MT et les câbles de sécurité des scaphandres. Leur toute dernière activité est une opération de communication de l'agence spatiale japonaise, appelée Message in a Bottle. La sortie se termine à 22h20 GMT. Elle aura duré 6h34. Pendant ce temps, dans le module Unity, Catherine COLEMAN a remplacé le module RPCM N14B_C. Le 1er mars 2011, à 15h05 GMT, le module PMM est amarré au nadir de Unity à l'aide du bras Canadarm2, piloté par BARRATT et STOTT. Une fois la jonction sécurisée, COLEMAN démonte le système CBCS et KELLY pressurise le vestibule qui mène au PMM. 
Fig. 32 : Arrimage du PMM à Unity, 1er mars 2011. Toujours le 1er mars, KONDRATIEV et KALIERI se lancent dans le grand chantier du remplacement du panneau de vannes BOA du système Vozdoukh. Utilisé pour l'élimination du dioxyde de carbone, Vozdoukh est situé dans le module Zvezda. Les deux cosmonautes doivent d'abord débrancher les câbles d'alimentation et déconnecter le système de télémesure BITS2-12 et couper son mode VD-SU (Выдачи Данных - Синхронизирующее Устройство). Le VD-SU est le mode de fonctionnement du BITS2-12 qui permet d'échanger des données avec le système informatique BVS, afin de les transmettre au sol (bande S). Or, comme le système de production d'oxygène Elektron-VM est lui aussi contrôlé par le mode VD-SU, il faut le mettre hors-service avant de pouvoir démonter le Vozdoukh. Quand l'Elektron est éteint, les cosmonautes peuvent démonter le BOA, puis ils reconnectent le BITS2-12, remettent en service le VD-SU et réactivent Elektron. Plus tard dans la journée, KALIERI, SKRIPOTCHKA et KELLY enfilent leurs scaphandres Sokol-KV-2 et vérifient l'ajustement de leurs couchettes Kazbek-UM dans le vaisseau Soyouz TMA-M, qui doit les ramener sur Terre dans deux semaines. Plus tard dans la soirée du 1er mars, vers 23h15 GMT, KELLY et LINDSEY pénètrent dans le PMM pour la première fois. Les cosmonautes Stephen BOWEN et Alvin DREW débutent la seconde sortie dans l'Espace de STS-133 le 2 mars 2011 à 15h42 GMT. Leur première activité consiste à éventer l'ammoniac encore présent dans le vieux module de pompe (PM) qu'ils ont déposé sur l'ESP-2. C'est DREW qui s'en charge. Le plus dur a été fait lors de la précédente sortie : il s'agissait d'installer sur le PM un système d'éventage spécial, qui assure à l'astronaute de ne pas voir son scaphandre contaminé par l'ammoniac. Une fois l'éventage terminé, DREW démonte le système et le ramène dans le sas. Pendant ce temps, BOWEN grimpe sur le Canadarm2 au moyen d'un cale-pieds APFR, et il se dirige vers l'extrémité du module européen Columbus. Là, il démonte la petite plate-forme LWAPA qui avait été installée par l'équipage de STS-123, lors de la sortie du 17 mars 2008. 
Fig. 33 : Préparation de la LWAPA avant son lancement, en 2008. Elle n'est plus utilisée, mais comme elle occupe un précieux emplacement sur le système d'accroche EPF de Columbus, il est préférable de la ramener. Cette tâche était d'ailleurs au programme de la mission STS-131, mais elle n'avait pu être réalisée faute de temps lors de la sortie du 13 avril 2010. BOWEN va donc fixer la LWAPA dans la soute de Discovery. 
Fig. 34 : BOWEN fixe la LWAPA dans la soute de Discovery, 2 mars 2011. Ensuite, DREW part retirer des couvertures thermiques sur le boîtier électronique (ExPCA) de l'ELC4, et il récupère des sacs d'outils qui avaient été laissés sur le CETA tribord lors des sorties d'août 2010. 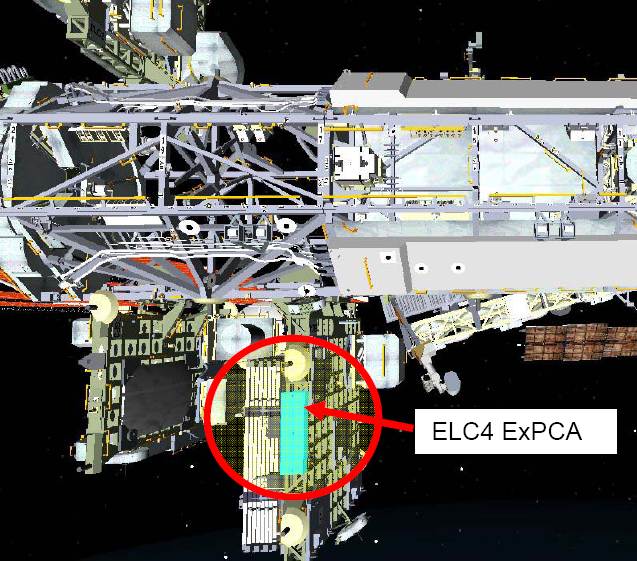
Fig. 35 : Emplacement du boîtier ExPCA. BOWEN, de son côté, se rend sur le robot Dextre au moyen du bras Canadarm2 pour lui installer une nouvelle caméra, appelée CLPA1. Une caméra identique, la CLPA2, avait été mise en place lors de STS-123, le 17 mars 2008. BOWEN profite de l'occasion pour ôter une couverture thermique présent sur le boîtier électronique EP1. 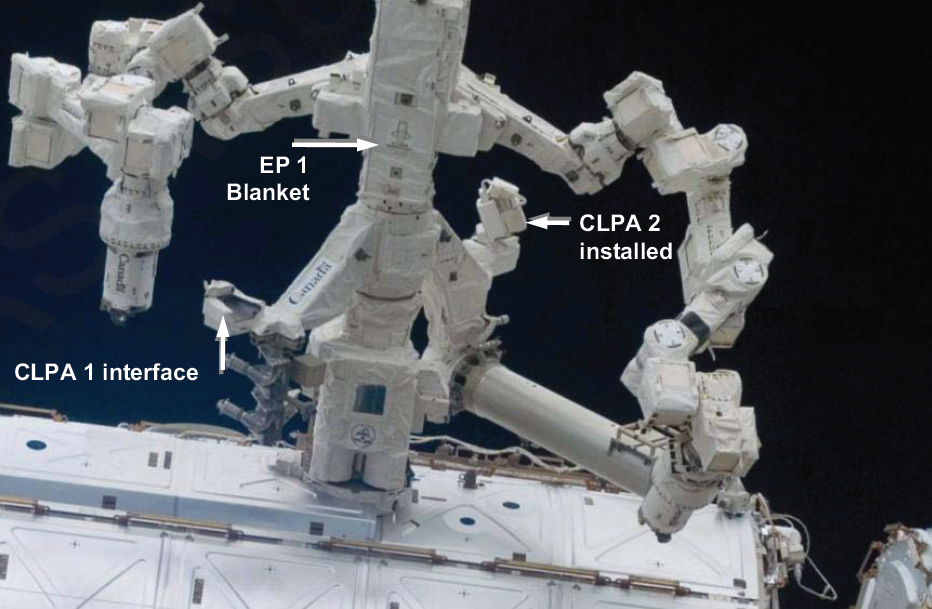
Fig. 36 : Emplacement des CLPA sur le robot Dextre. DREW est quant à lui sur le segment P3 pour installer une nouvelle lampe sur le chariot CETA bâbord. Ensuite, il va sur le segment P1 pour réparer la couverture thermique de l'un des ensembles de vannes (RBVM) des radiateurs photovoltaïques.  Fig. 37 : Emplacement du RBVM sur lequel BOWEN doit
intervenir. Toujours sur le P1, il resserre les boulons d'une petite cale (RGFSB, Radiator Grapple Fixture Stowage Beam) destinée à stocker temporairement le matériel qui serait nécessaire en cas de réparation d'un des radiateurs. Elle avait été installée le 11 avril 2010 lors de STS-131, mais les astronautes l'avaient alors trouvée un peu trop desserrée. Une première réparation par STS-132 lors de la sortie du 21 mai 2010 n'avait pas abouti. 
Fig. 38 : Des cales RGFSB. 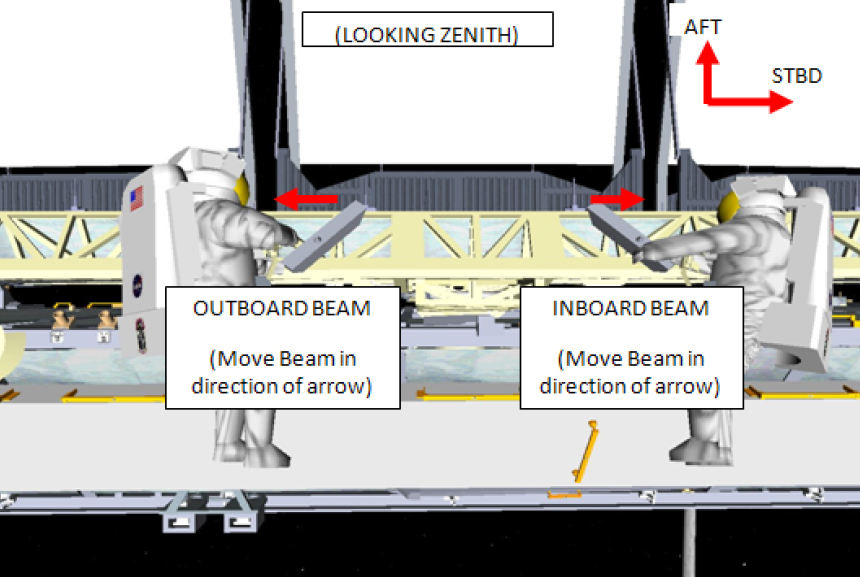
Fig. 39 : Emplacement des RGFSB. 


Fig. 40 : Vue de la RGFSB de la caméra de casque de DREW, 2 mars 2011. DREW part ensuite sur le module Tranquility pour ôter une couverture thermique sur un câble d'alimentation. BOWEN installe des capuchons sur les caméras CLPA de Dextre, ainsi que sur celles du POA et du Canadarm2. 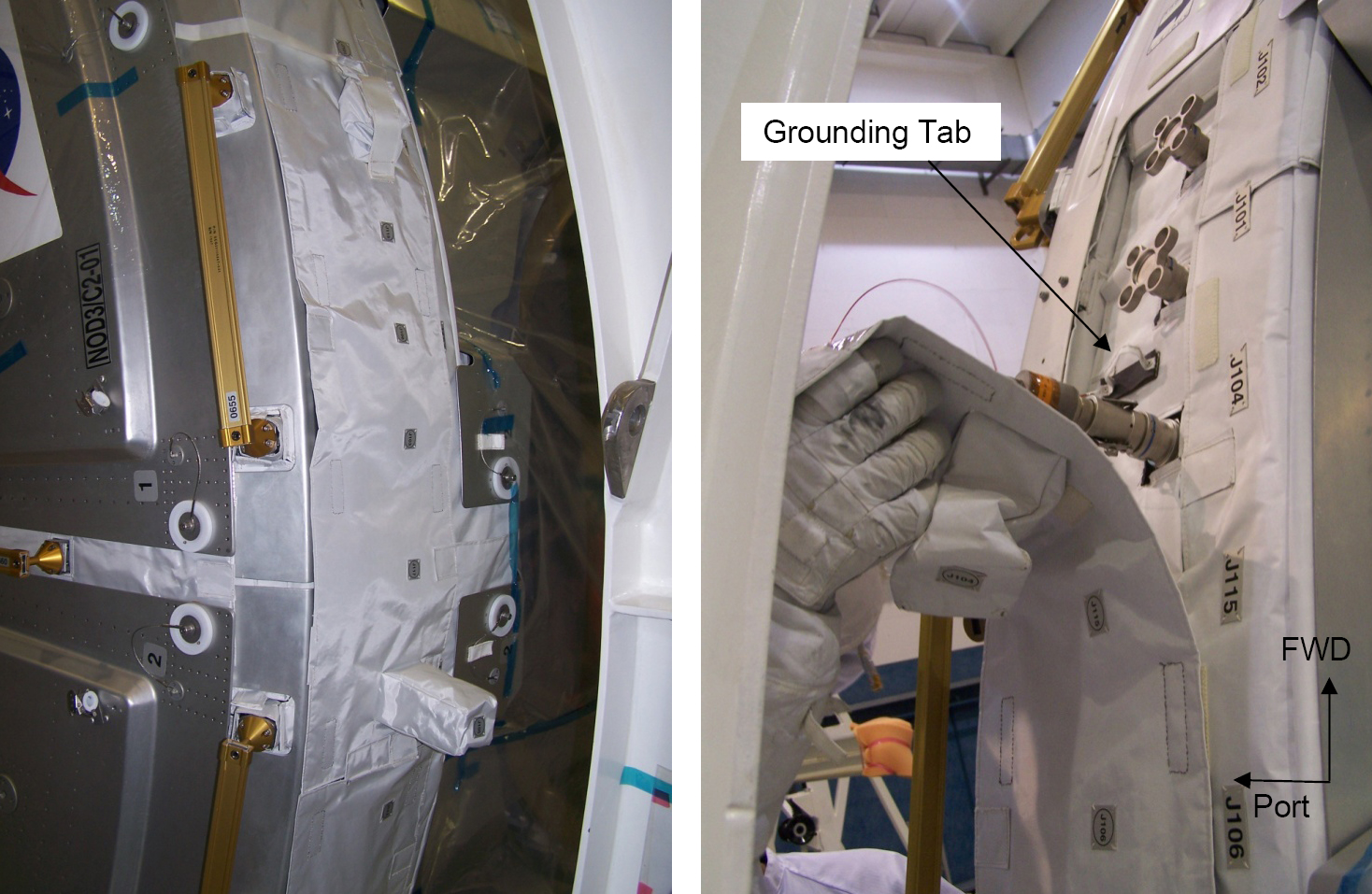
Fig. 41 : Emplacement de la couverture thermique à enlever sur Tranquility. Et pour finir, BOWEN récupère l'adaptateur du mât de charge russe GStM-2, qui avait été déposé sur le PMA-3 lors de la sortie du 3 février 2006. Il emmène l'adaptateur sur le point d'attache EFGF du module Zaria. La sortie se termine à 21h56 GMT. Elle a duré 6h14. 
Fig. 42 : BOWEN récupère l'adaptateur sur le FRGF du PMA-3, 2 mars 2011. 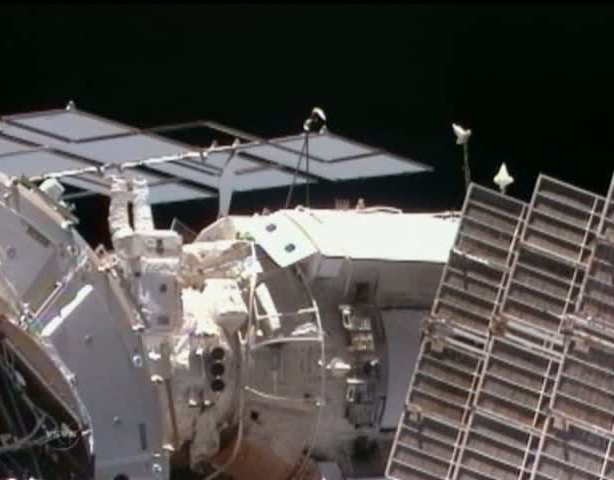
Fig. 43 : BOWEN installe l'adaptateur sur l'EFGF de Zaria, 2 mars 2011. Toujours le 2 mars, après la sortie, KONDRATIEV et KALIERI poursuivent les travaux sur le système Vozdoukh. Ils installent une nouvelle unité BOA et vérifient son étanchéité. En attendant, c'est le système américain CDRA qui assure l'élimination du gaz carbonique. Les derniers branchements sont réalisés le 3 mars. Mais pour rebrancher la télémesure, le système BITS2-12 et son mode VD-SU doivent à nouveau être arrêtés, ce qui nécessite une fois encore de mettre hors-service le système Elektron. Quand cette grande opération de maintenance est terminée, KELLY et COLEMAN travaillent à leur tour sur le système américain CDRA, équivalent du Vozdoukh situé dans le module Harmony. Les moteurs RCS de Discovery sont mis en service le 3 mars 2011à 14h03 GMT (dt=26', dV=1,0m/s, dh=1,7km). Vozdoukh est réactivé le 4 mars 2011, et il fonctionne maintenant sur ses trois lits cationiques, alors qu'il ne pouvait en utiliser que deux avant l'opération de maintenance. Mais dans la nuit du 3 au 4 mars 2011, le système Elektron tombe en panne. Il fonctionnait sur sa pompe de secours, car sa pompe principale était tombée en panne il y a plusieurs mois. Une autre unité BZh est disponible à bord, mais elle contient des pièces qui ont été récupérées sur des unités défaillantes, et son bon fonctionnement n'est donc pas assuré. Toujours le 4 mars 2011, les astronautes transfèrent l'armoire ExPrESS Rack-8 (ER-8) du PMM vers le module Destiny. Le système Vozdoukh, qui vient d'être modifié, tombe de nouveau en panne dans la nuit du 4 au 5 mars 2011 à cause d'une surchauffe de la pompe. Les cosmonautes le redémarrent dans la foulée. La navette Discovery se sépare du PMA-2 le 7 mars 2011 à 12h00 GMT. Elle effectue une rotation de 360° autour de la station afin de la prendre en photos. Son atterrissage est réalisé au Centre Spatial Kennedy le 9 mars 2011 à 16h57'15" GMT. Son vol a duré 12 jours 19 heures 3 minutes 51 secondes. 8. Atterrissage du vaisseau Soyouz TMA-MLe 9 mars 2011, Aleksandr KALIERI doit réparer la pompe N1 du panneau 4SPN2 de la boucle KOB2 du système de régulation thermique de Zvezda. Il avait remplacé cette pompe le 7 février 2011. Le vaisseau japonais HTV-2 avait été positionné sur le zénith d'Harmony pour libérer l'accès à la soute de la navette Discovery. Maintenant que celle-ci est rentrée sur Terre, il faut remettre le HTV-2 au nadir d'Harmony. En effet, quand il faudra larguer le vaisseau à la fin de sa mission, le Canadarm2 devra être positionné sur Harmony, car il ne peut pas réaliser cette opération depuis la MBS. Or, si le HTV est au zénith d'Harmony, le Canadarm2 ne pourra pas le saisir car son point d'ancrage sur Harmony est au nadir. Le HTV-2 est saisi par le bras Canadarm2 et il est désarrimé d'Harmony le 10 mars 2011 à 11h49 GMT. Après une rotation à 180°, il est réarrimé au zénith à 14h19 GMT. Les cosmonautes préparent alors le vestibule pour pouvoir entrer à nouveau dans le HTV-2. 
Fig. 44 : Le HTV-2 est transféré au nadir d'Harmony, 10 mars 2011. Mais le 11 mars 2011, à environ 05h46 GMT, le Japon est victime d'un séisme d'une violence historique, suivi par un tsunami. Outre une situation critique à la centrale nucléaire de Fukushima 1, cette catastrophe provoque des dégâts matériels au centre spatial de Tsukuba. En conséquence, les opérations liées au vaisseau HTV-2 sont suspendues, et la quasi-totalité des systèmes du module Kibo sont mis hors-service, à l'exception de quelques systèmes essentiels et de l'instrument MELFI. 
Fig. 45 : La Tranche 3 de la centrale nucléaire de Fukushima 1, 16 mars 2011. Dans le module Zvezda, le système Elektron est redémarré avec succès le 12 mars. Le lendemain, KALIERI et SKRIPOTCHKA réalisent un essai des moteurs de Soyouz TMA-M, qui doit les ramener sur Terre dans quelques jours. Ils allument les moteurs DPO à 07h53 GMT. Plus tard, ils sont rejoints par KELLY pour une répétition générale des opérations de rentrée. La mission MKS-26 se termine officiellement le 14 mars 2011, quand Scott KELLY transmet le commandement de la station à Dmitri KONDRATIEV. Aleksandr KALIERI, Oleg SKRIPOTCHKA et Scott KELLY embarquent dans le vaisseau Soyouz TMA-M le 16 mars 2011. 
Fig. 46 : SKRIPOTCHKA, KELLY et KALIERI embarquent Soyouz TMA-M se sépare de Poïsk le 16 mars 2011 à 04h27'08" GMT. Trois minutes plus tard, KALIERI allume brièvement les moteurs DPO pour éloigner le vaisseau de la station. Ensuite, à 04h33 GMT, il lance l'essai du nouveau système de contrôle manuel d'attitude en mode numérique (RODK). A 04h39 GMT, il allume les moteurs DPO une seconde fois pour éloigner encore le vaisseau, puis il réalise l'essai du système de contrôle manuel d'attitude en mode analogique (ROAK). Cette opération permet de tester les trois capteurs de vitesse angulaire qui avaient été installés en orbite. Les deux essais (RODK et ROAK) se déroulent avec succès. Le moteur SKD est allumé à 07h03'09" GMT (dt=257", dV=115,2m/s). Les trois compartiments du vaisseau (PAO, SA et BO) sont séparés à 07h28 GMT, et seize secondes après la séparation le PAO est basculé avec un angle de -78,5°, ce afin d'assurer une orientation correcte du SA même dans le cas où la séparation n'aurait physiquement pas eu lieu. Soyouz TMA-M entame sa rentrée dans l'atmosphère à 07h31 GMT, et le parachute s'ouvre à 07h40 GMT. L'atterrissage a lieu le 16 mars 2011 à 07h54'05,3 GMT, 86km au nord de la ville kazakhe d'Arkalyk. Les conditions météorologiques sur le site d'atterrissage sont particulièrement difficiles, et les cosmonautes sont évacués en hélicoptère avant même d'avoir enlevé leurs scaphandres Sokol-KV-2. Les équipes de récupération ne prennent pas non plus le temps de monter l'hôpital de campagne. Après la traditionnelle cérémonie de bienvenue à Koustanaï, KELLY embarque dans l'avion Gulfstream-III de la NASA qui le ramène à Houston (avec deux escales), tandis que KALIERI et SKRIPOTCHKA montent dans le Tu-134 qui les ramène à la base Tchkalovski, près du TsPK. Le vol de KALIERI, SKRIPOTCHKA et KELLY a duré 159 jours 8 heures 43 minutes 10 secondes.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
