Le poste de travail (RWS)Les postes de travail RWS (Robotic Workstation) permettent de piloter le bras Canadarm2, le support mobile MBS et l'embout Dextre. Deux RWS sont présentes à bord de la Station Spatiale Internationale depuis le vol Discovery STS-102 de mars 2001. Elles sont toutes les deux situées dans le module Destiny (emplacements Bâbord 6 et Tribord 6). Les RWS tiennent dans des armoires de type ISPR, mais elles comprennent également plusieurs interfaces (écrans, joysticks, etc.). 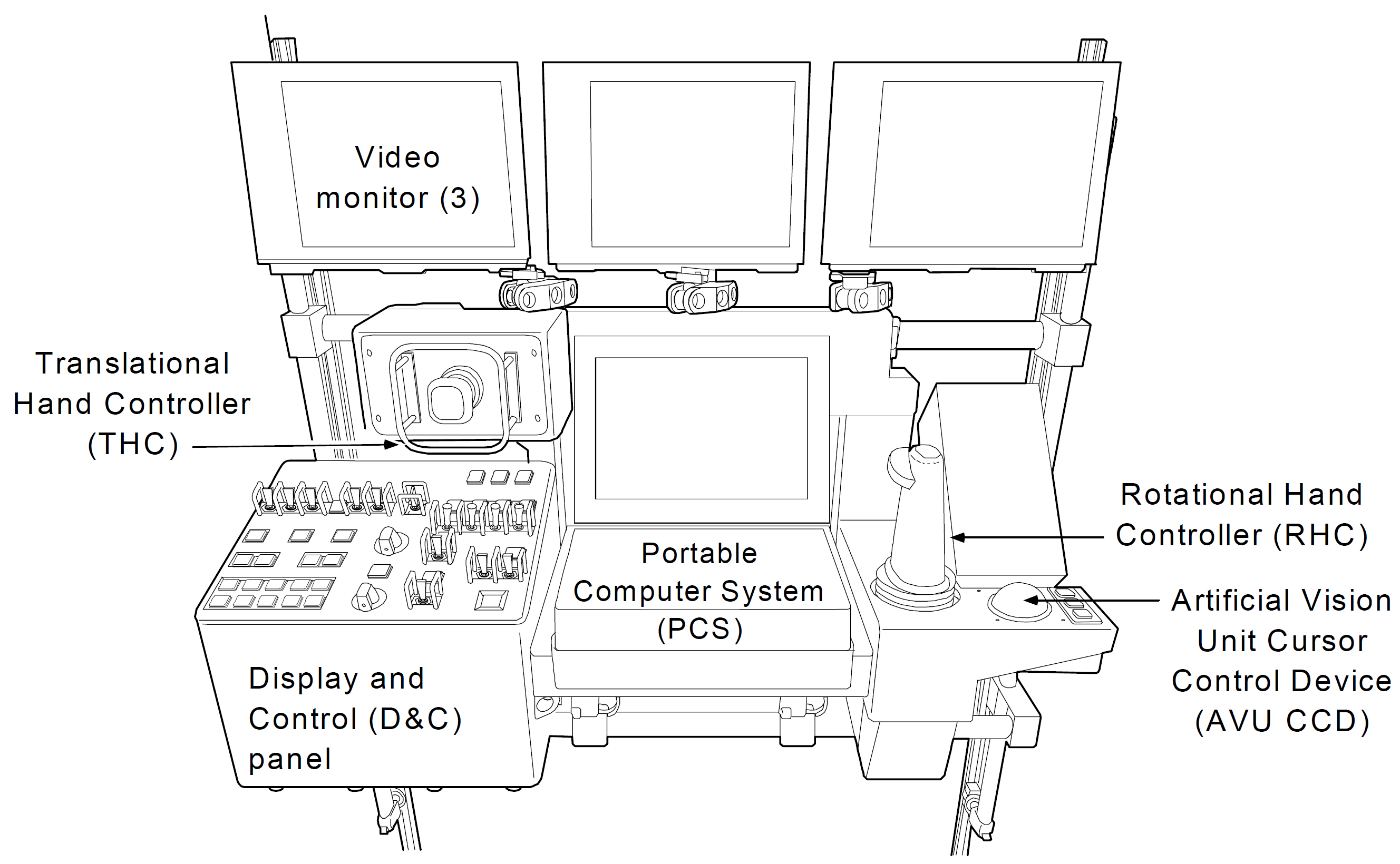 Fig.
1 : Schéma des interfaces de la RWS. Il y a toujours une RWS principale, et une RWS de secours. La RWS principale est celle qui est équipée des interfaces (qui n'existent qu'à un seul exemplaire). La RWS de secours ne permet que de faire l'arrêt d'urgence. Pour intervertir le rôle des deux RWS, il faut déplacer les interfaces.  Fig.
2 : La RWS de Destiny, 16 novembre 2008. A l'origine, seule la RWS de Bâbord 6 était opérationnelle. Ses interfaces étaient installées directement sur l'armoire, et c'est d'ici que toutes les opérations étaient menées. Quand la Cupola a été installée, en février 2010, les interfaces y ont été transférées, et elles sont connectées à la RWS de Tribord 6. Actuellement, les opérations sont donc pilotées depuis la Cupola, en utilisant la RWS de Tribord 6. Lors de la sortie dans l'Espace du 28 février 2011, cette RWS a connu un dysfonctionnement, et les astronautes ont dû se replier sur celle de Bâbord 6. 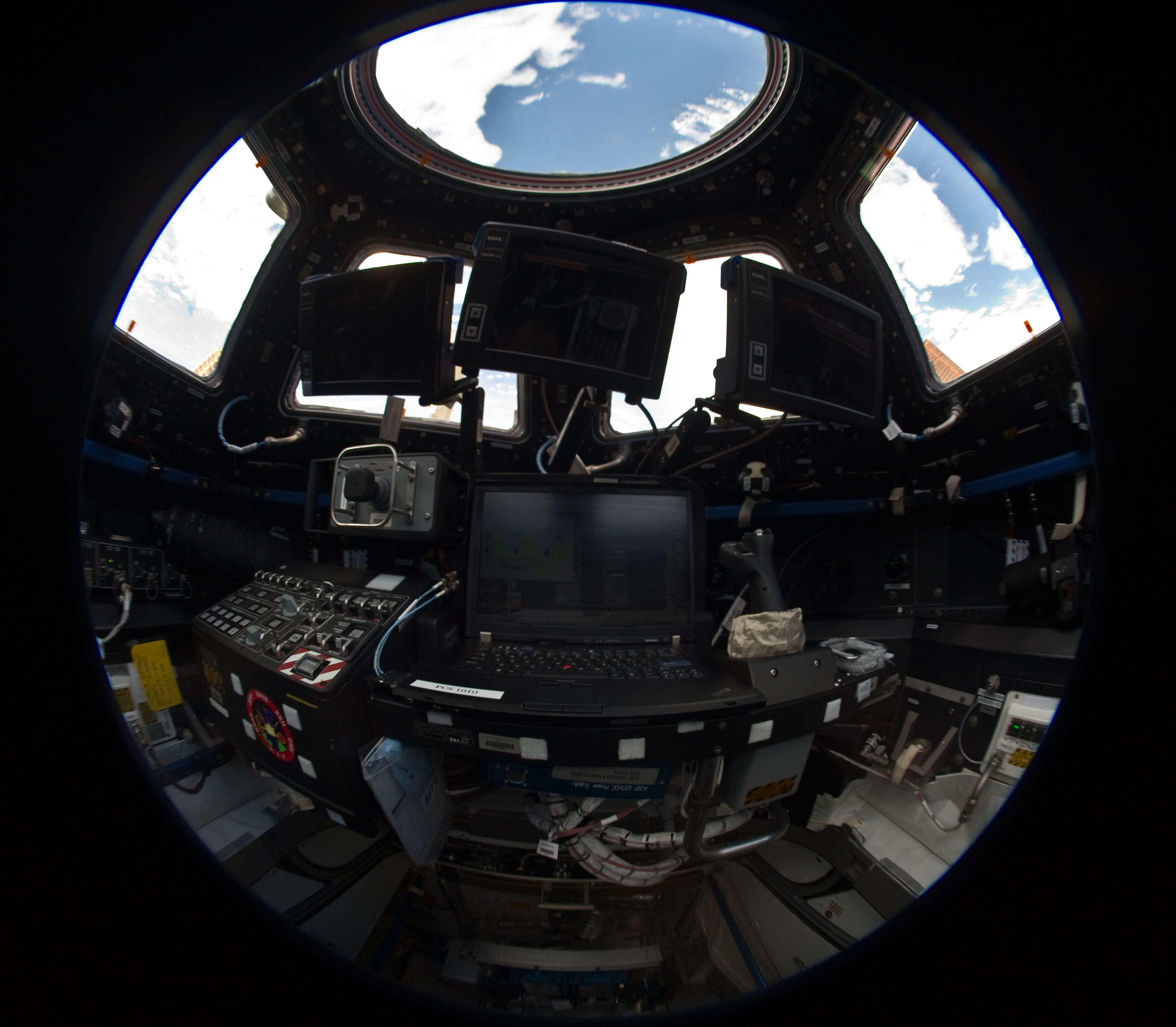 Fig.
3 : La RWS de la Cupola, 8 mai 2010. Bibliographie- International Space Station Familiarization Dernière mise à jour : 16 avril 2012 |
|