Soyouz | Motorisation
1. La première version de Soyouz 1. La première version de Soyouz1.1. GénéralitésLes premiers vaisseaux Soyouz étaient dotés d'un Système Propulsif pour les Rendez-vous et les Corrections appelé SKDU (Сближающе-Корректирующая Двигательная Установка). Il était constitué de deux sous-systèmes indépendants :
- un bloc propulsif KTDU, pour les corrections de trajectoire et le freinage, 
Fig. 1.1.1 : Le vaisseau Soyouz-19 sur orbite. 1.2. Le bloc propulsif KTDULe développement du KTDU (Корректирующе-Тормозная Двигательная Установка) a été confié en 1962 à l'OKB-2 d'Alekseï ISSAÏEV. Ce bureau d'études est situé dans la ville de Koroliov, près de Moscou, et il est devenu en 1967 le KB KhimMach. Le projet est placé sous la responsabilité d'Anton TAVZARACHVILI, qui avait déjà travaillé sur le moteur S5.4 du vaisseau Vostok. Le rôle du KTDU est, d'une part, de réaliser les corrections de trajectoires nécessaires aux rendez-vous orbitaux et, d'autre part, de freiner le vaisseau quand il est arrivé au terme de sa mission, afin qu'il puisse quitter l'orbite et redescendre sur Terre. 
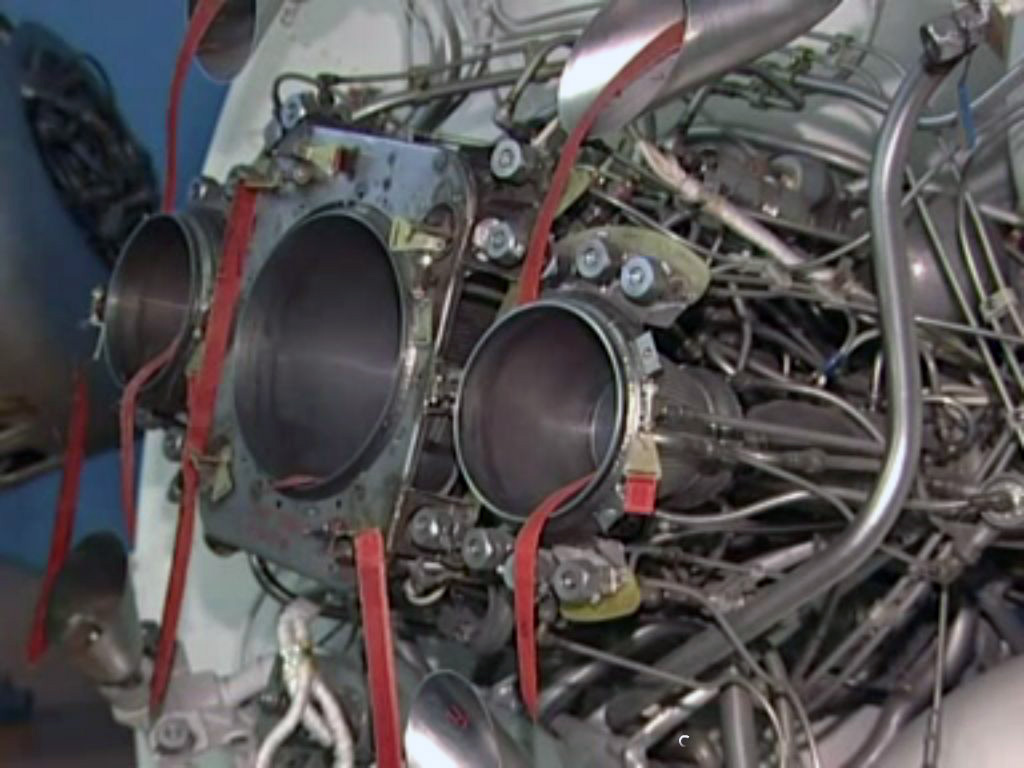

Fig. 1.2.1 : Le KTDU-35 et ses moteurs SKD et DKD. Compte-tenu de ce dernier rôle absolument crucial, le KTDU du vaisseau Soyouz de première génération, appelé KTDU-35 (11D62), est équipé de deux moteurs :
- le moteur principal SKD (Сближающе-Корректирующий Двигатель), 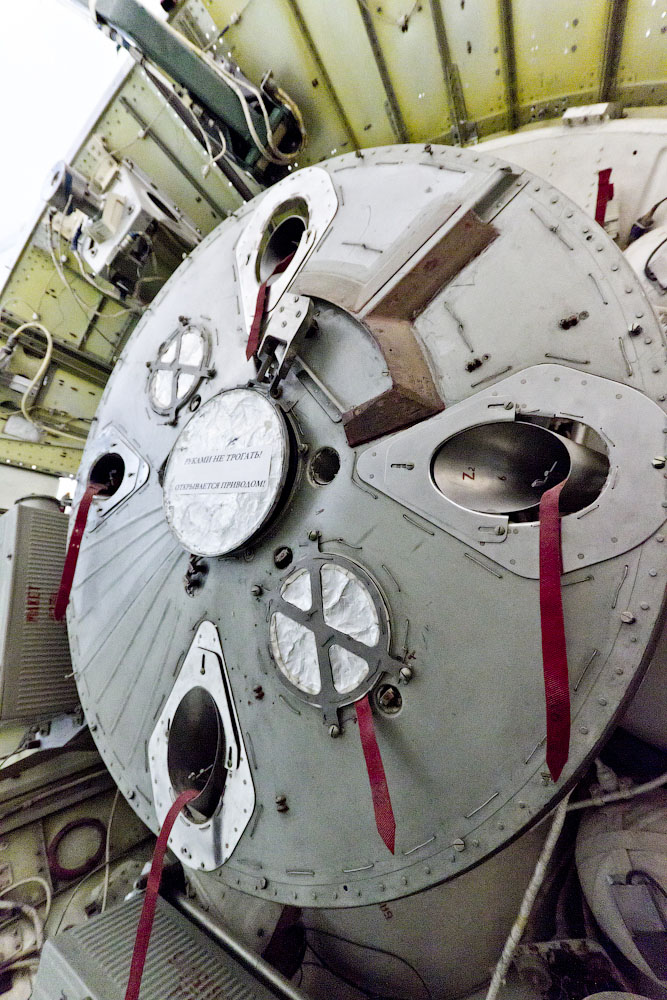
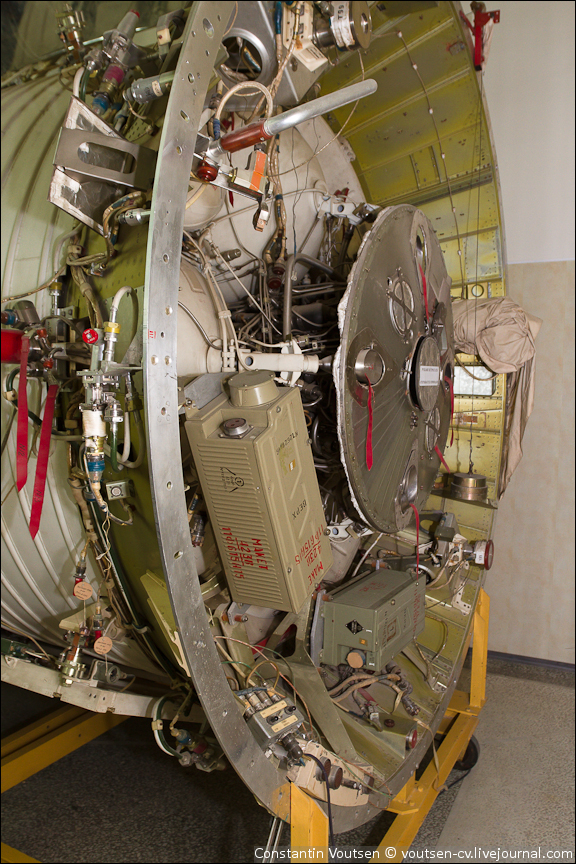
Fig. 1.2.3 : Un KTDU-35. Le SKD est un moteur monochambre S5.60 de 417kgf de poussée. Il est entouré de quatre tuyères pour l'évacuation des gaz d'entraînement de sa turbopompe. Les ergols utilisés sont l'UDMH (carburant) et l'AK-27I (comburant), un mélange d'acide azotique et de peroxyde d'azote. Pendant sa phase de fonctionnement, l'orientation du vaisseau est assurée par les moteurs DPO (voir section 1.3). Le SKD est protégé des températures extrêmes du milieu spatial par un capot amovible. Le 18 mai 1979, le SKD de Soyouz-32 a été mis en service par erreur alors que le capot était encore fermé. 
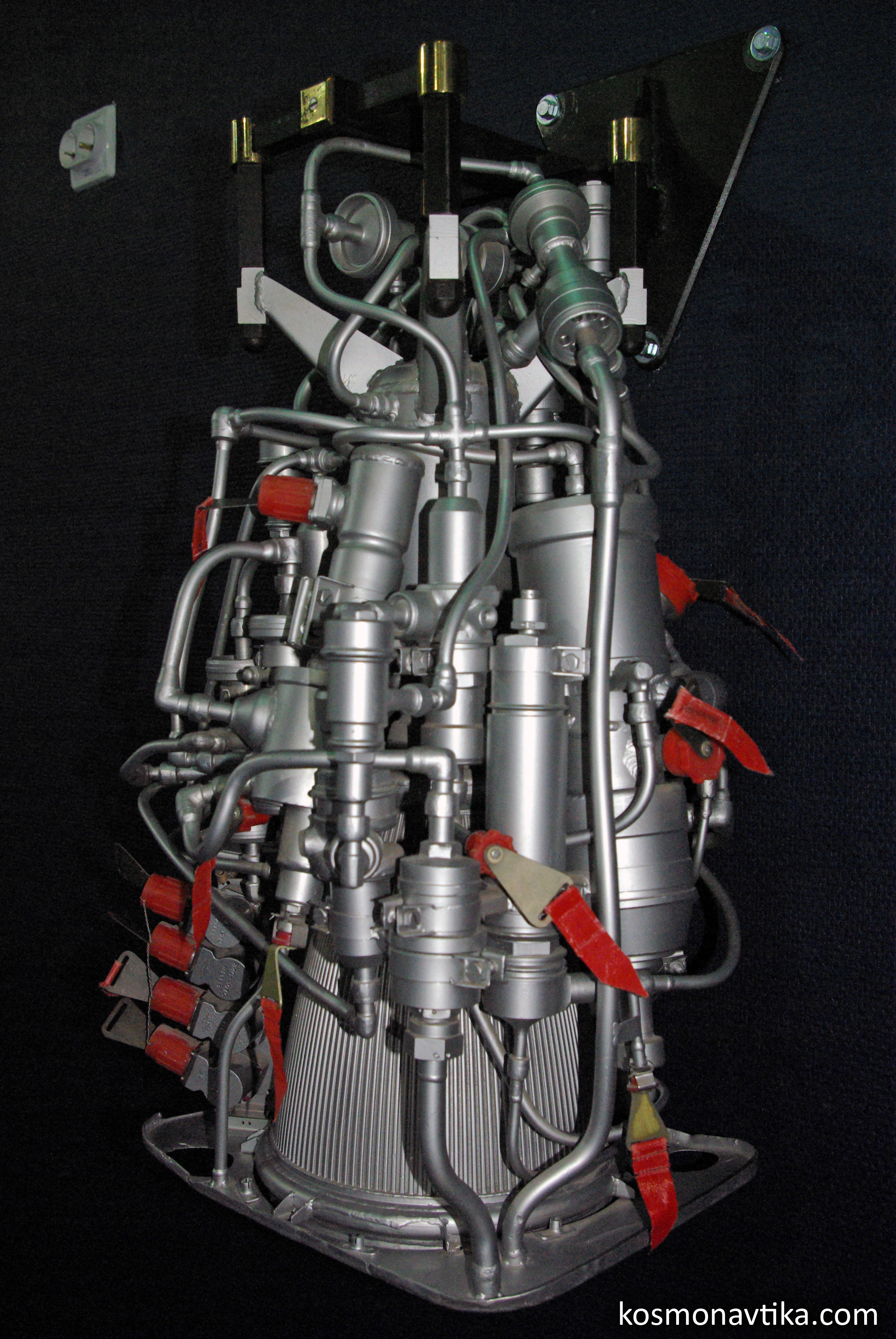


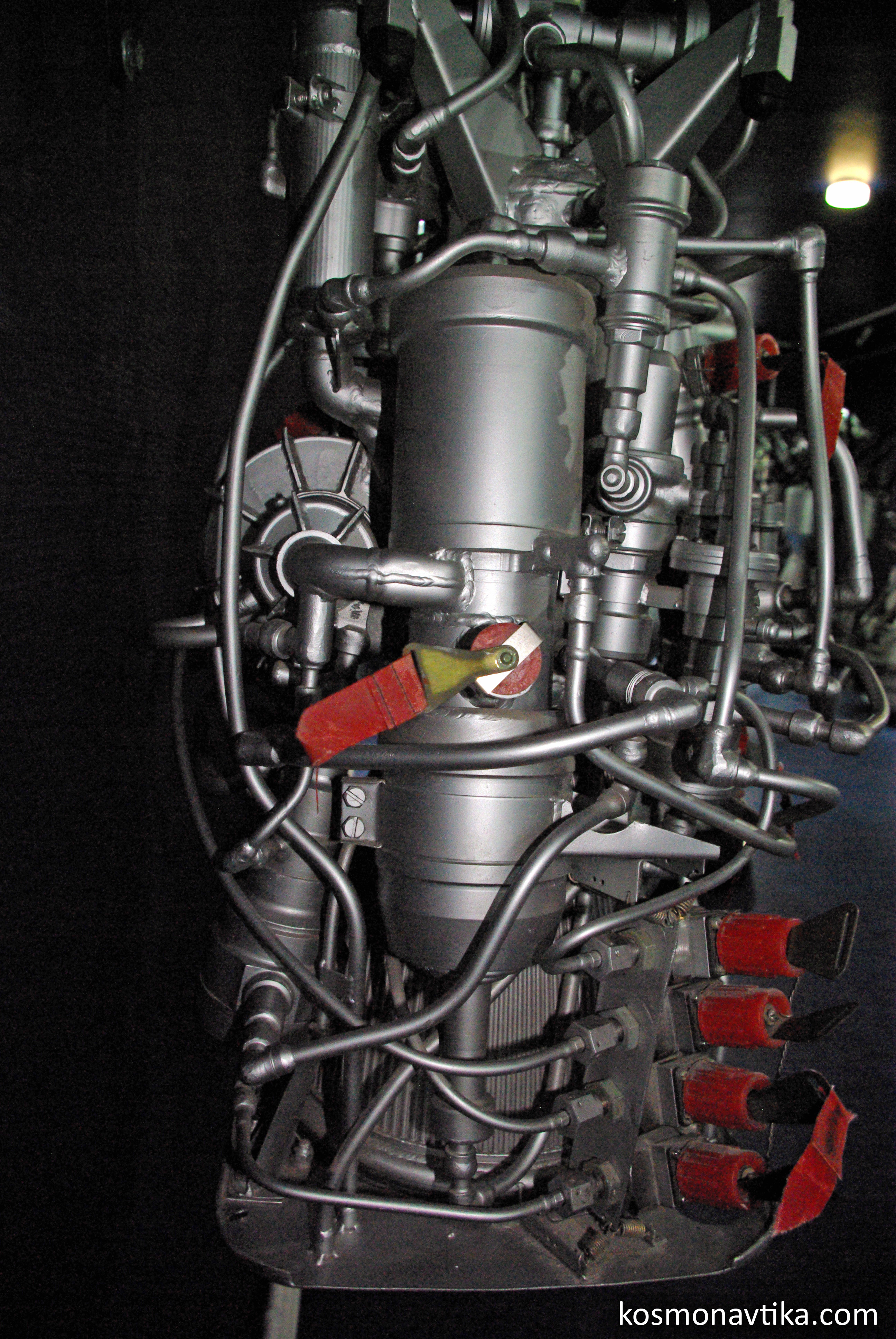
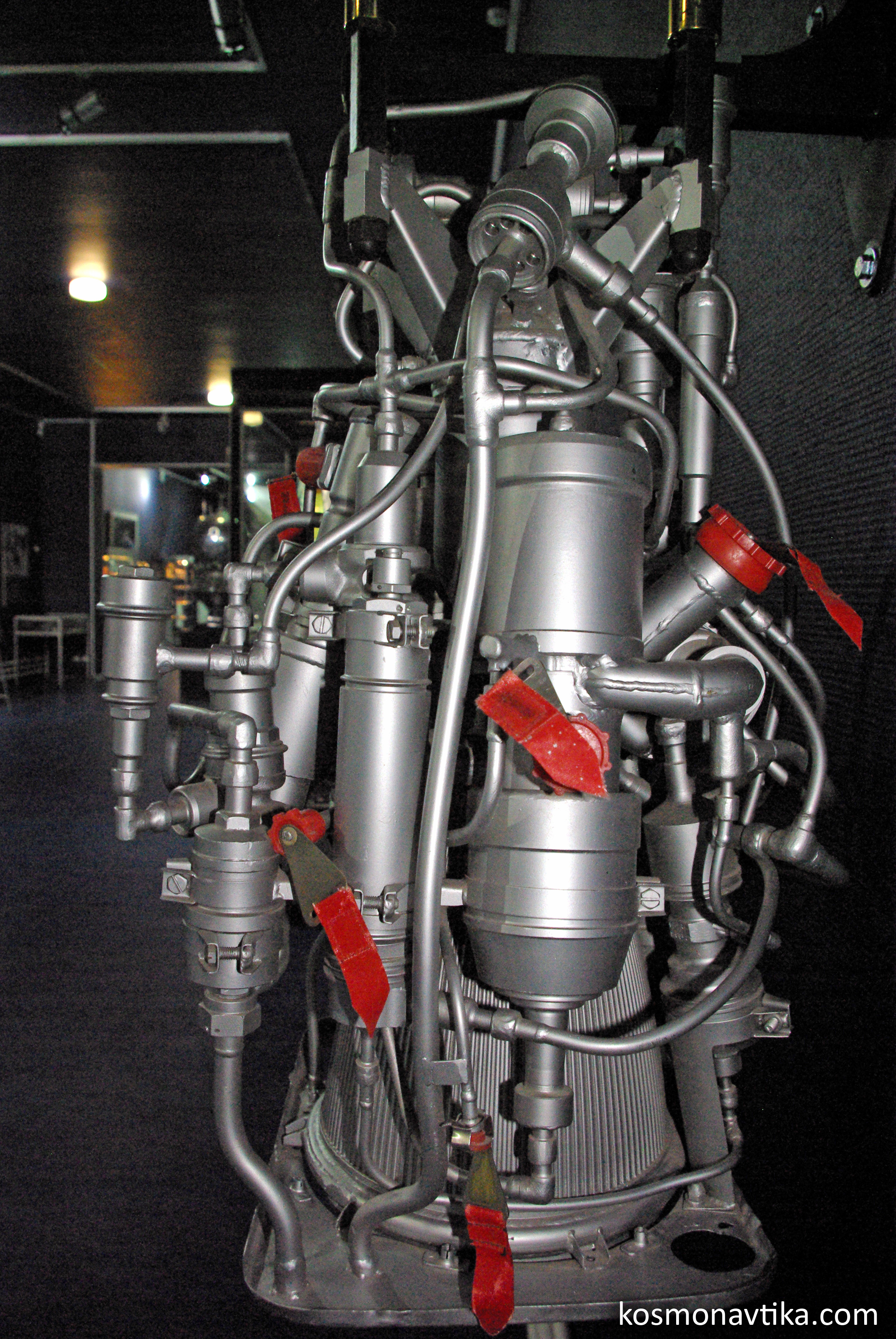
Fig. 1.2.4 : Un moteur S5.60. Le DKD est un moteur bichambre S5.35 de 411kgf de poussée, non rallumable. Il est muni de quatre tuyères qui éjectent des gaz d'entraînement de sa turbopompe afin de contrôler l'orientation du vaisseau. Ainsi, le DKD peut effectuer la manœuvre de freinage même en cas de défaillance des moteurs d'orientation DPO. Le DKD a dû été utilisé à deux reprises : lors du premier vol d'essai de Soyouz, Cosmos 133, en novembre 1966, et lors du vol Soyouz-33 d'avril 1979. Lors de ce second évènement, il a été endommagé lors du fonctionnement erratique du SKD. 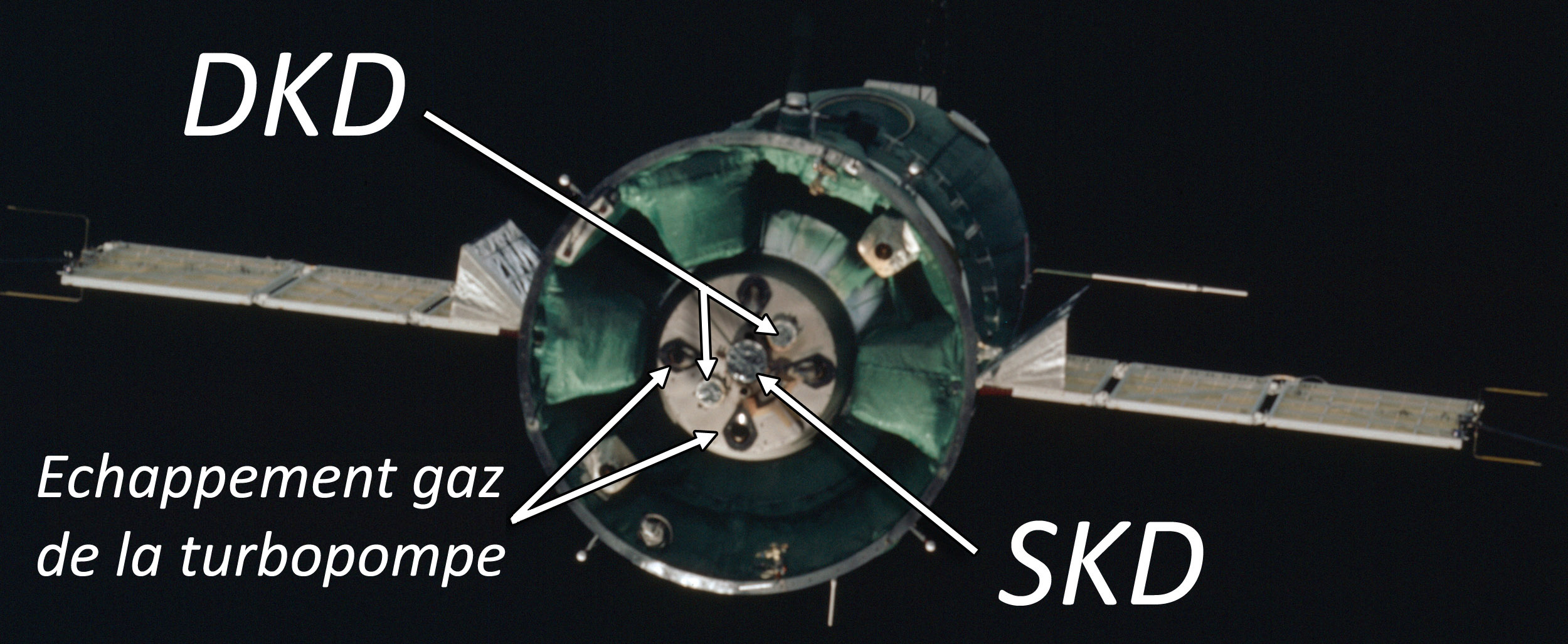
Fig. 1.2.5 : Une vue intéressante du KTDU de Soyouz-19. 

Fig. 1.2.6 : Le moteur S5.35. Les deux moteurs SKD et DKD sont alimentés par le même ensemble de réservoirs, constitué de deux réservoirs de carburant et deux réservoirs de comburant. Les quatre réservoirs, de forme sphérique, sont organisés pour former un carré. A cela s'ajoutent quatre petits ballons d'hélium pour le maintien en pression des ergols. Vidéo 1 : Essai d'allumage du SKD et du DKD. 1.3. Le sous-système d'orientationIl est sous la responsabilité du Département n°27 de l'OKB-1 de Sergueï KOROLIOV, maître d'œuvre du vaisseau Soyouz. Le développement est supervisé par Dmitri KNIAZEV, qui trouve la mort avec une partie de son équipe dans les années 1960 dans un accident d'avion au-dessus de l'Oural [1]. Le sous-système d'orientation du vaisseau Soyouz de première génération est constitué de :
- 14 moteurs DPO (Двигатель Причаливания и Ориентации) de 10kgf de poussée, Les DPO sont commandés par le boîtier BVDPO (Блок Включения ДПО). Ils sont utilisés pour les corrections d'orbite et l'orientation, alors que les DO sont utilisés uniquement pour l'orientation. Ce sont des moteurs à monergol, c'est-à-dire un seul ergol qui joue à la fois le rôle de carburant et de comburant. Ici, c'est le peroxyde d'hydrogène (H2O2) qui a été choisi. Mélangé avec un catalyseur, il se dismute selon la réaction d'oxydoréduction suivante : 2H2O2 → 2H2O + O2 Cette réaction est exothermique. L' eau et le dioxygène sont éjectés par la tuyère, ce qui créé une poussée générant un moment autour du centre de gravité du vaisseau. 2. Les vaisseaux Soyouz TSur les vaisseaux Soyouz de deuxième génération, appelés Soyouz T (11F732), le système de propulsion a été complètement repensé. L'idée est d'en faire un système « combiné », c'est à dire où tous les moteurs sont alimentés par les mêmes réservoirs. Ce nouveau Système de Motorisation Combinée KDU (Комбинированная Двигательная Установка) est composé de deux sous-systèmes :
- l'Ensemble de Base BB, 2.1. L'Ensemble de BaseL'Ensemble de Base BB (Базовый Блок) du système de propulsion du vaisseau Soyouz T joue le rôle du KTDU de la génération précédente. Il est d'ailleurs appelé KTDU-426 (11D426), et il est constitué de trois éléments :
- le système d'alimentation, 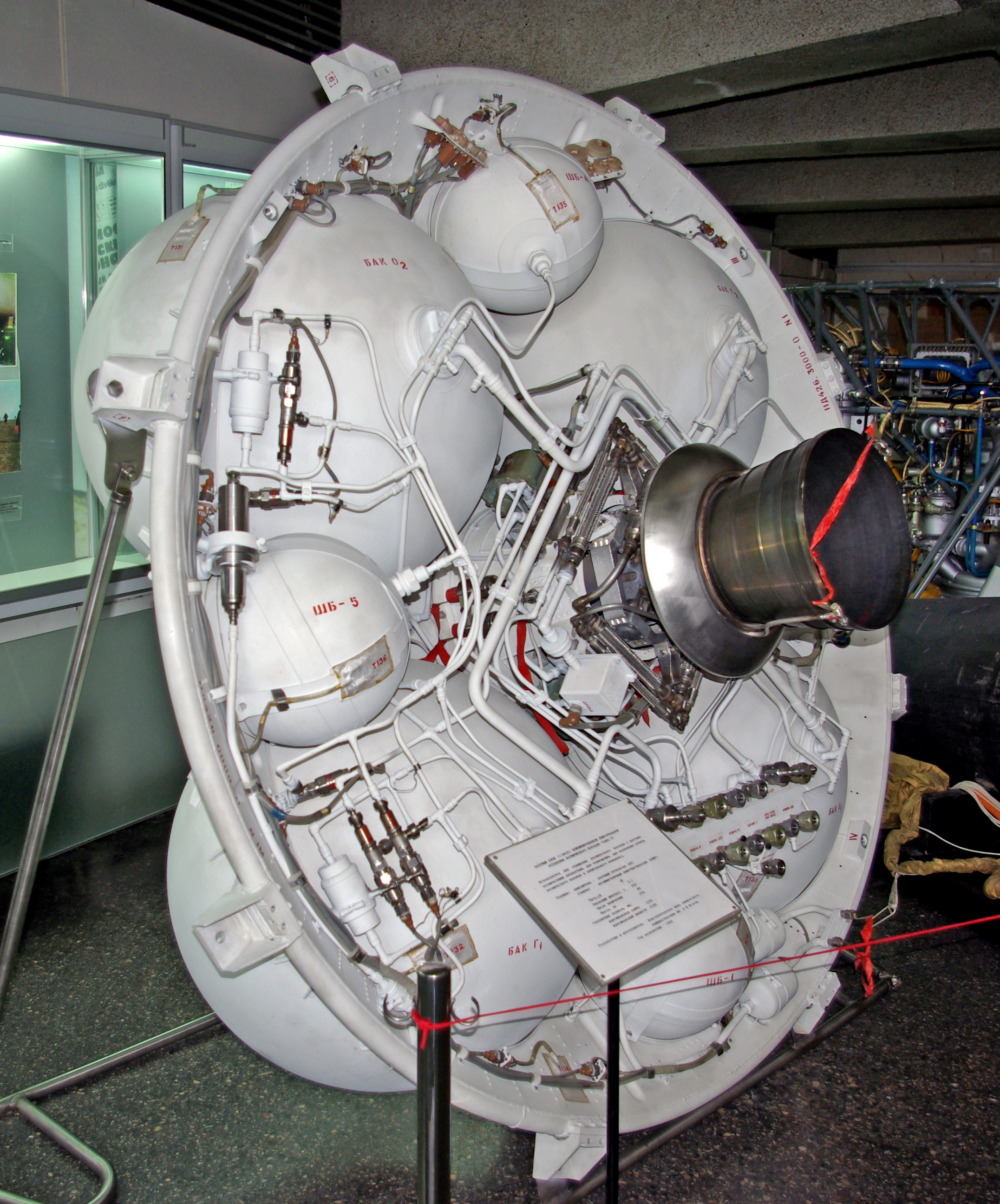
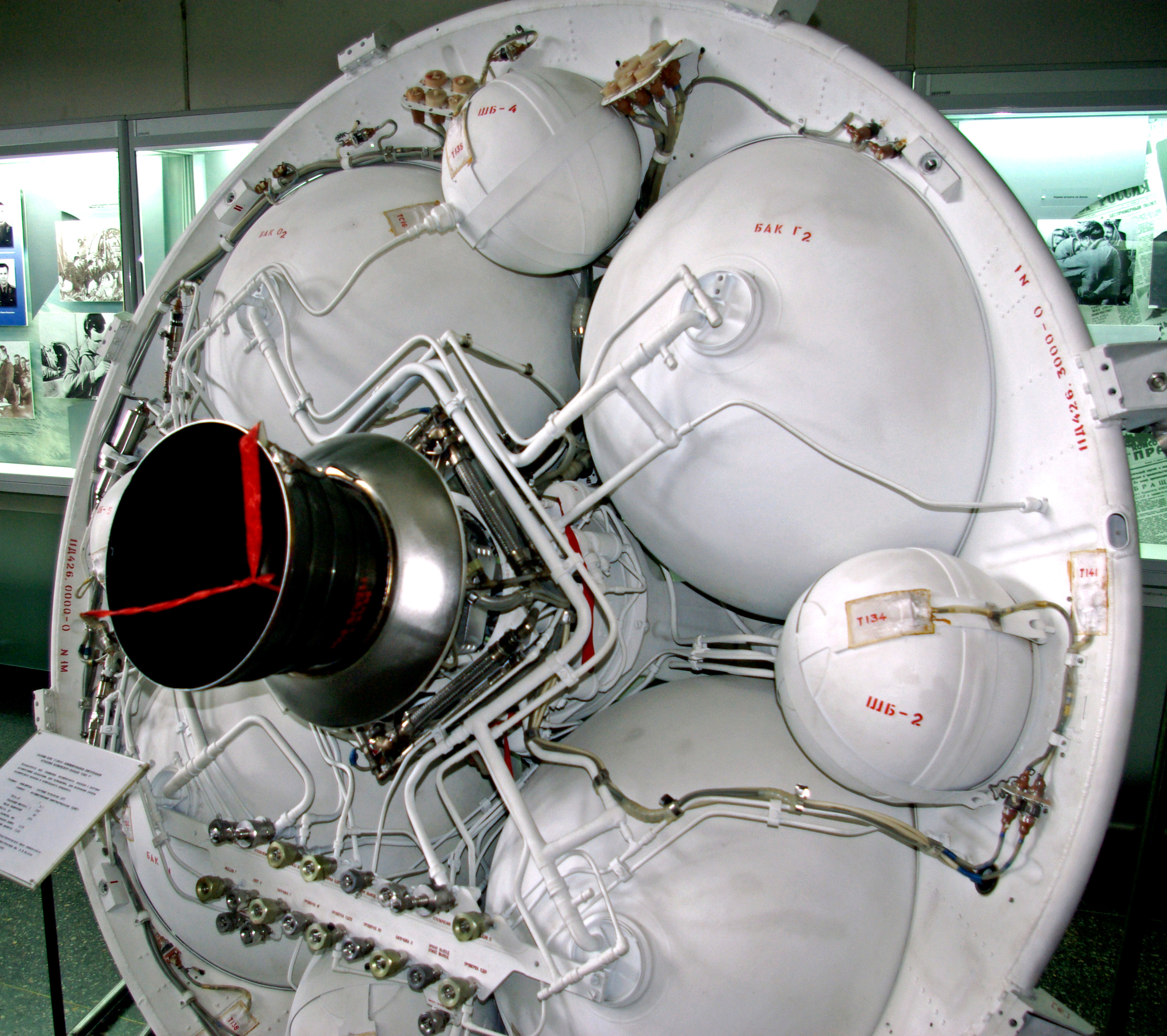

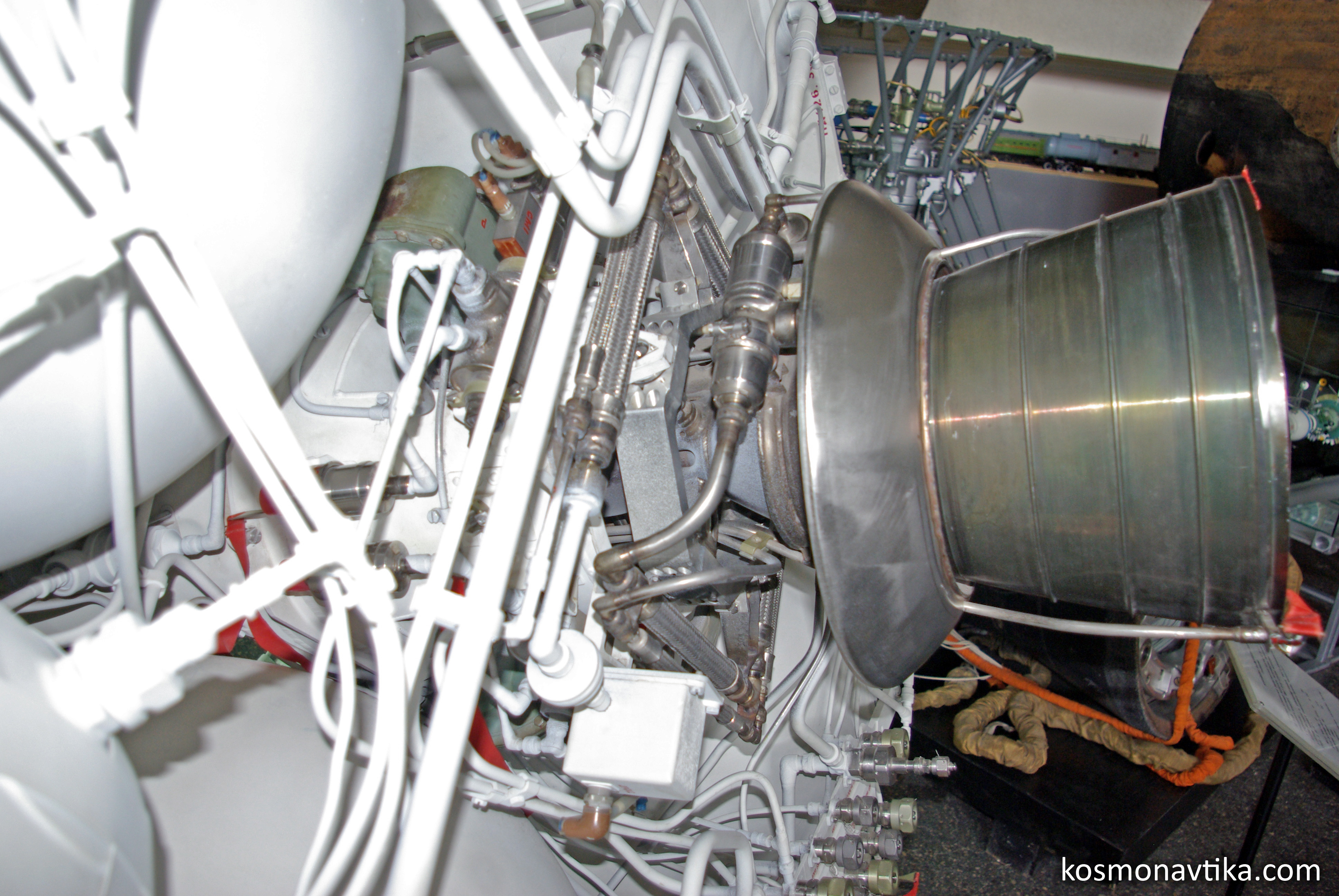


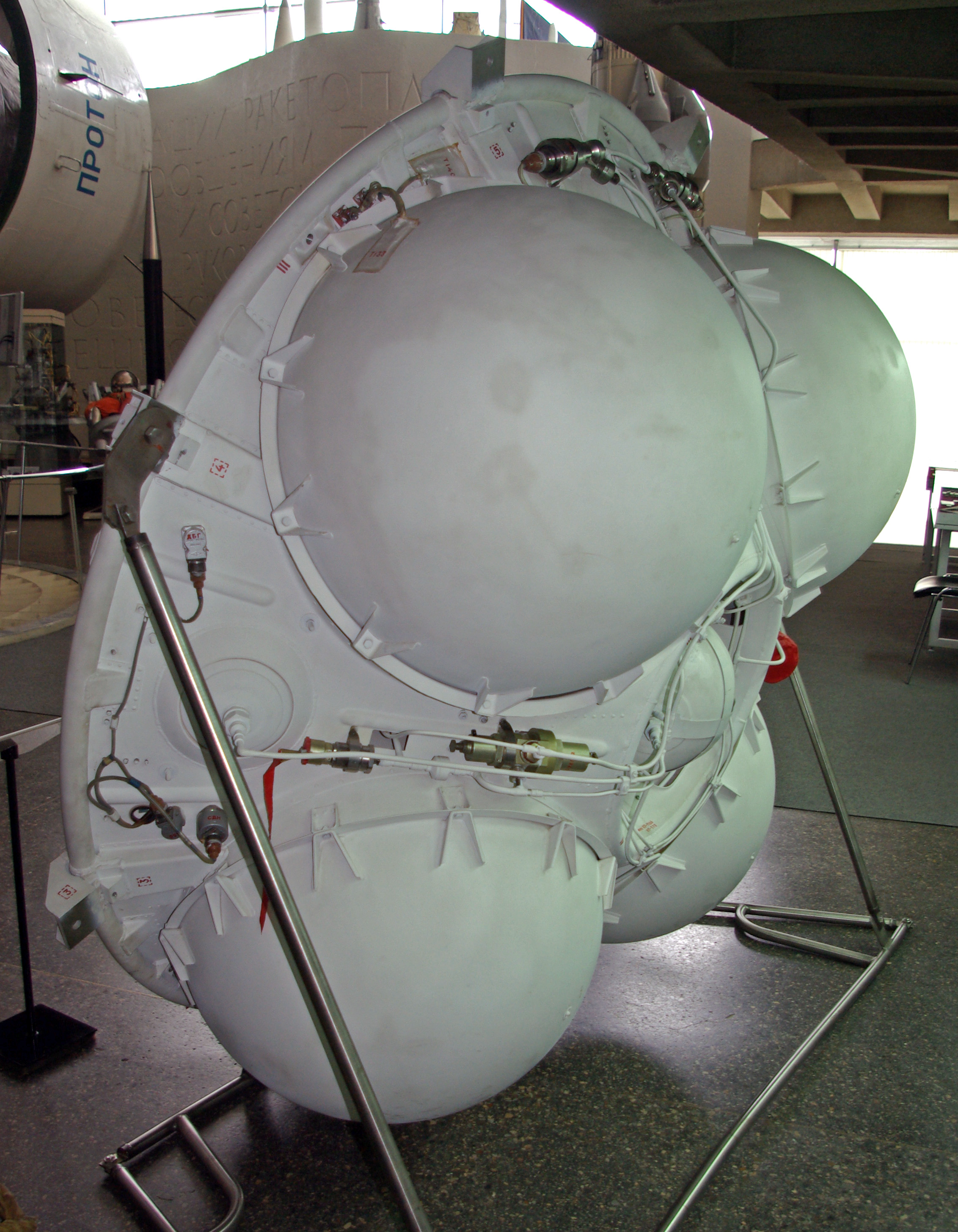
Fig. 2.1.1 : L'Ensemble de Base KTDU-426. Le rôle du système d'alimentation est d'assurer le stockage des ergols et leur acheminement jusqu'aux moteurs SKD et DPO. Il est constitué de deux réservoirs de carburant (BG1 et BG2) et de deux réservoirs de comburant (BO1 et BO2), qui ont une capacité totale d'environ 900kg. Pour assurer la redondance, le système KDU est divisé en deux voies, ce qui permet d'assurer de manière indépendante l'alimentation et la pressurisation du moteur SKD et de moteurs d'orientation DPO. En microgravité, il est nécessaire de maintenir les réservoirs d'ergols sous pression pour éviter le phénomène de cavitation. C'est le rôle du système de pressurisation. La mise sous pression est réalisée par un gaz neutre, l'hélium, contenu dans quatre ballons (ChB1 et ChB2 sur la voie 1, ChB3 et ChB4 sur la voie 2). 

Fig. 2.1.2 : Le ballon ChB4 et la vanne EPKN1 sur l'Ensemble de Base du vaisseau Soyouz T. L'hélium est délivré dans les réservoirs d'ergols au travers d'une vanne électropneumatique (EPKN1 sur la voie 1, EPKN2 sur la voie 2) et d'un détendeur (RD1 sur la voie 1, RD2 sur la voie 2). Par rapport au KTDU-35 de la première génération de Soyouz, le KTDU-426 ne possède plus qu'un seul moteur, le SKD. Le moteur de secours DKD a en effet été supprimé, car il s'est avéré que les moteurs d'orientation DPO pouvaient remplir son rôle. 
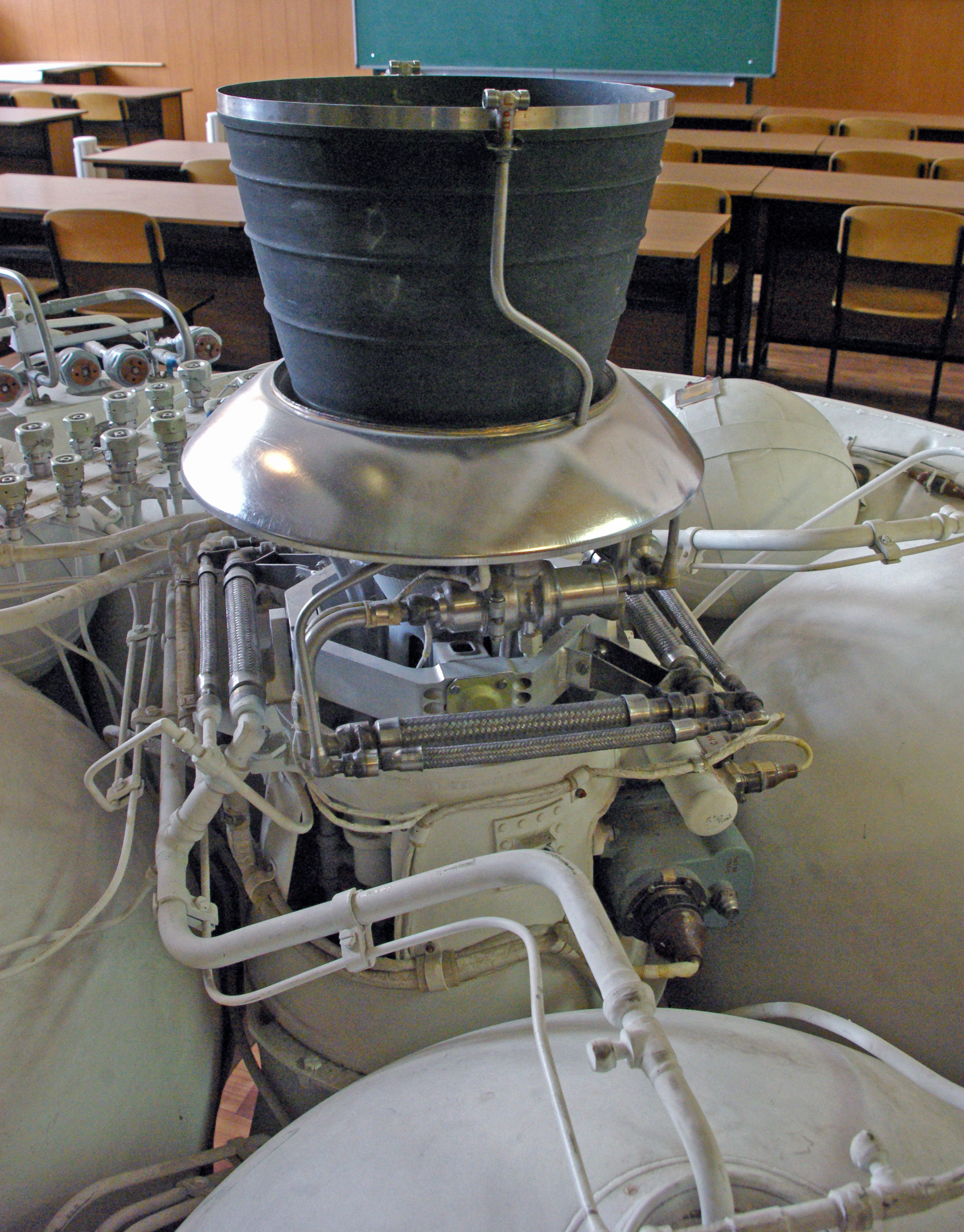
Fig. 2.1.3 : L'Ensemble de Base KTDU-426. La poussée est plus faible que sur le modèle précédent (315kgf), mais l'impulsion spécifique est meilleure (292"). De plus, pour le comburant, le mélange AK-27I a été remplacé par du tétraoxyde d'azote. 
Fig. 2.1.4 : Un vaisseau Soyouz T amarré à la station Saliout-7. 2.2. Les moteurs d'orientation DPOLa grande nouveauté du système combiné KDU est donc l'utilisation de moteurs d'orientation entièrement nouveaux, qui sont alimentés par les mêmes réservoirs que le moteur principal SKD. Il y a en tout vingt-six moteurs DPO, de deux types différents :
- 14 moteurs de forte poussée (14kgf), pour les corrections d'orbite et l'orientation, La moitié de ces vingt-six moteurs sont alimentés par la Voie 1, l'autre par la Voie 2. Le système de vannes permet de puiser dans les réservoirs de l'une ou l'autre des voies, ce qui permet de les vider de manière cohérente, préservant le centre de gravité du vaisseau. En décembre 1968, l'OKB-1, devenu entre temps le TsKBEM, sous-traite le développement des moteurs DPO au NIIMach, situé dans la petite ville de Nizhniaïa Salda, dans l'Oural. Le NIIMach se lance donc dans le développement de deux nouveaux moteurs :
- une nouvelle version du 11D428, appelée 11D428A, pour les DPO de forte poussée, 
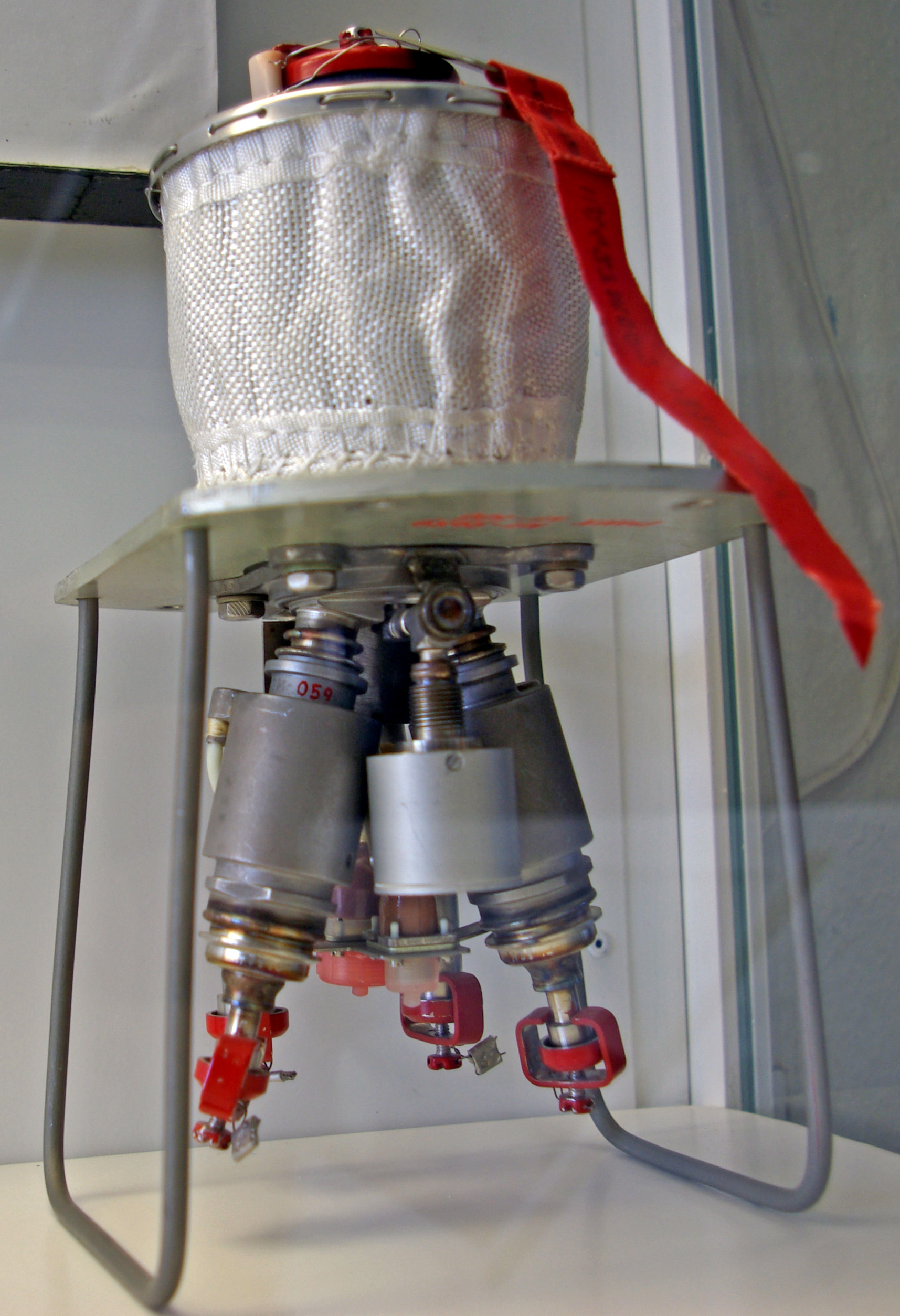

Fig. 2.2.1 : Un moteur 11D427. A l'automne 1971, le développement du 11D427 est transféré au KB KhimMach [3]. Quatre des quatorze moteurs DPO de forte poussée sont situés à l'arrière du vaisseau, et peuvent servir de secours pour amorcer la rentrée dans l'atmosphère en cas de défaillance du moteur principal SKD. Chacun de ces DPO de forte poussée est accompagné de deux DPO de faible poussée. 
Fig. 2.2.2 : La base d'un PAO de vaisseau Soyouz T. 3. Les vaisseaux Soyouz TM3.1. L'Ensemble de BaseAu cours des années 1980, une nouvelle version du vaisseau Soyouz fait son apparition, le Soyouz TM (11F732A51), et son système de propulsion KDU est modernisé. Il est maintenant doté de l'Ensemble de Base KTDU-80, qui inclut le moteur S5.80, en développement au KB KhimMach depuis 1977. 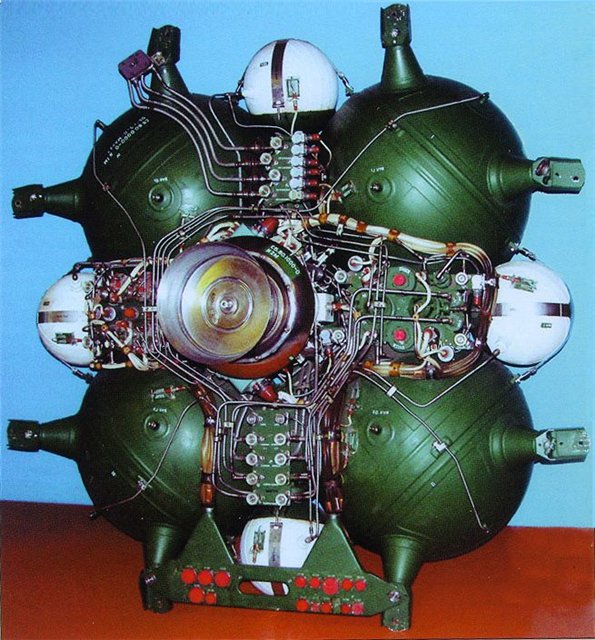
Fig. 3.1.1 : L'Ensemble de Base KTDU-80 du vaisseau Soyouz TM. Par rapport à la version précédente, le KTDU-80 est équipé de diaphragmes métalliques dans ses réservoirs d'ergols. 
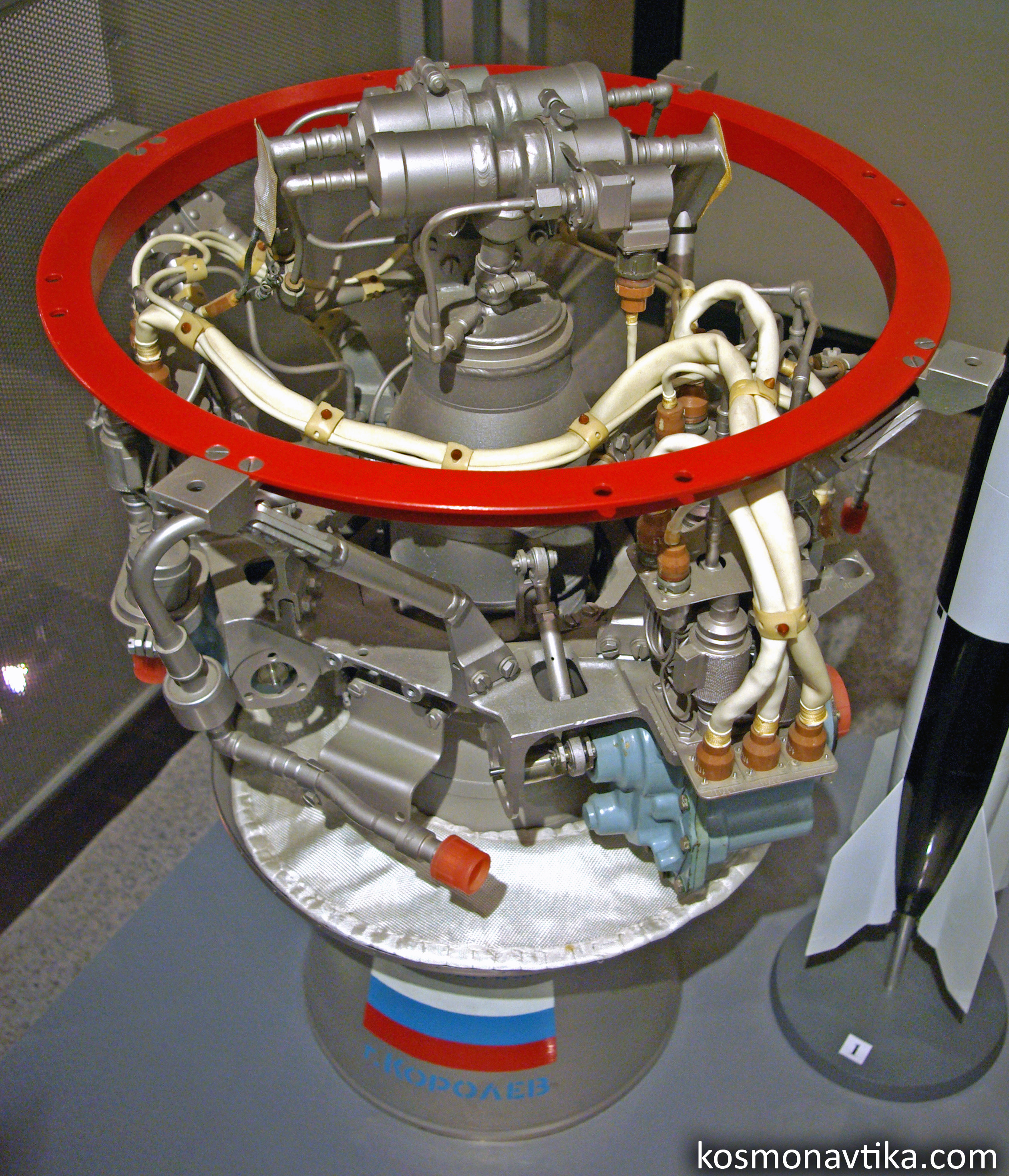


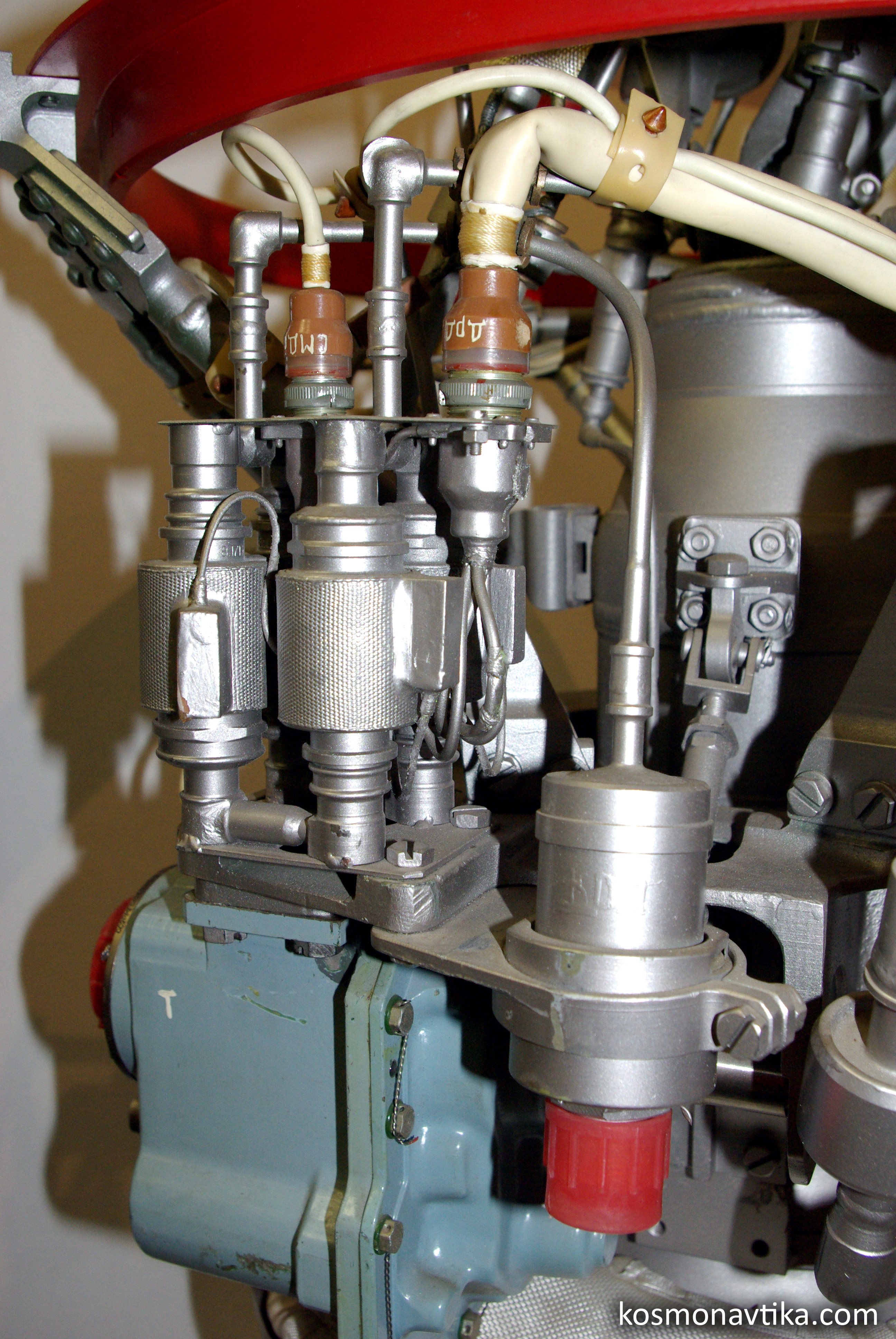
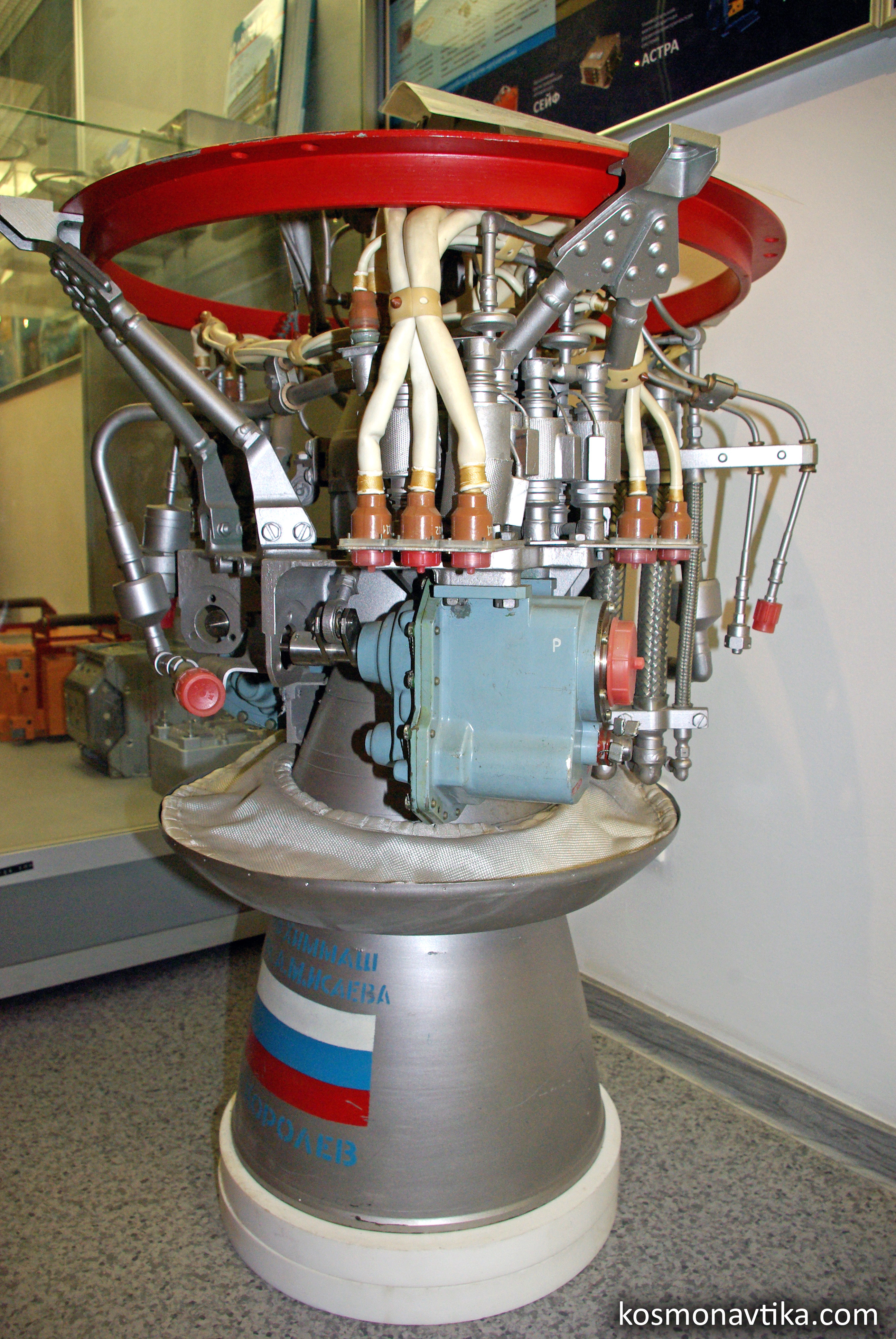
Fig. 3.1.2 : Le moteur S5.80. Vidéo 2 : Une vidéo sur le KTDU-80 et ses essais au sol. 
Fig. 3.1.3 : Un KTDU-80 en préparation chez la RKK Energiya. 3.2. Les moteurs d'orientation DPOLe sous-système d'orientation des vaisseaux Soyouz TM est quasiment identique à celui de Soyouz T. Il comprend un total de vingt-six moteurs DPO : - 12 moteurs DPO-M de faible poussée (2,7kgf), numérotés 1 à 12. Ils servent uniquement à orienter le vaisseau. Sur les premiers vaisseaux Soyouz TM, il s'agissait de moteurs 11D427M du KB KhimMach. Mais pour des raisons industrielles, la production de ces moteurs a posé des problèmes au cours des années 1990. 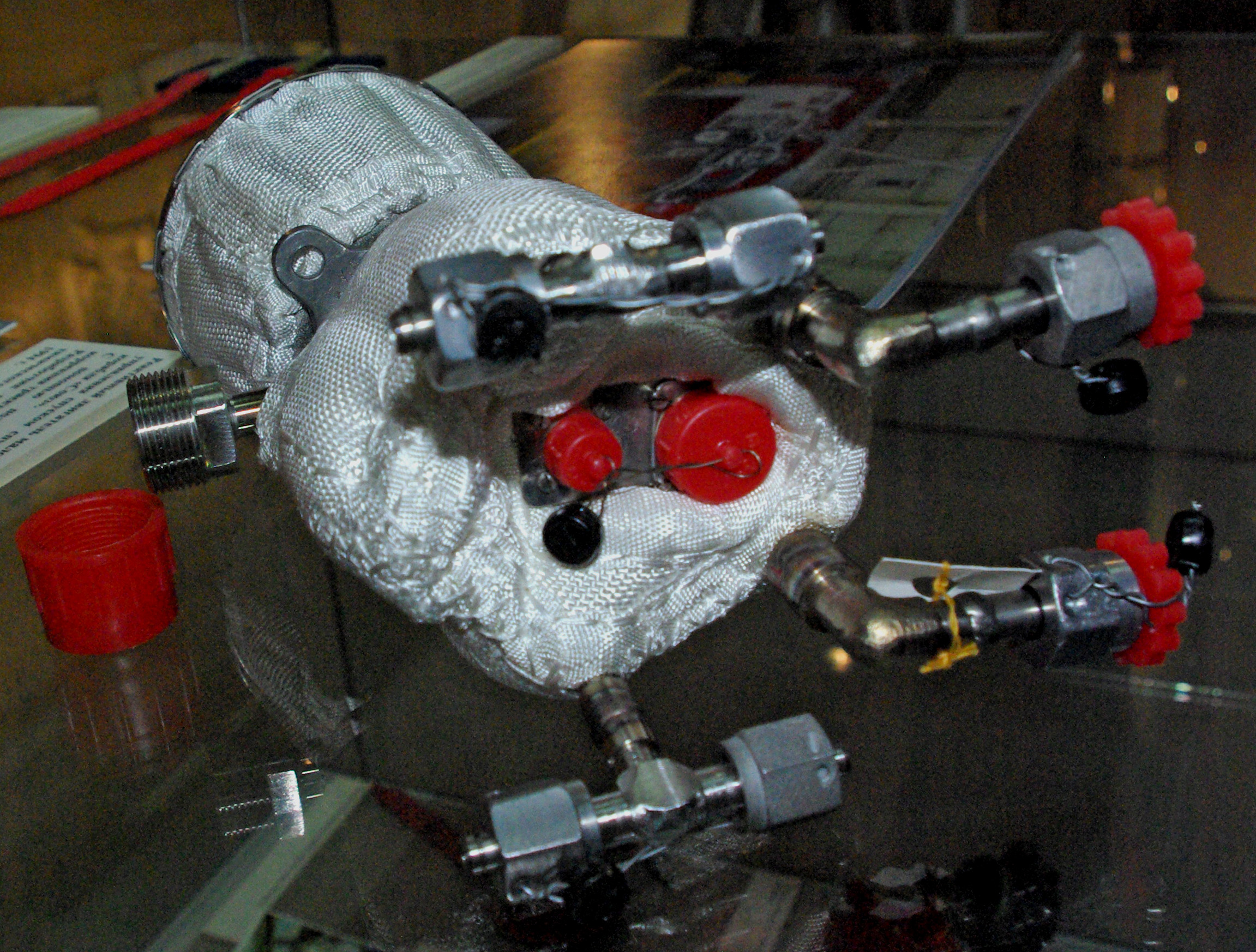

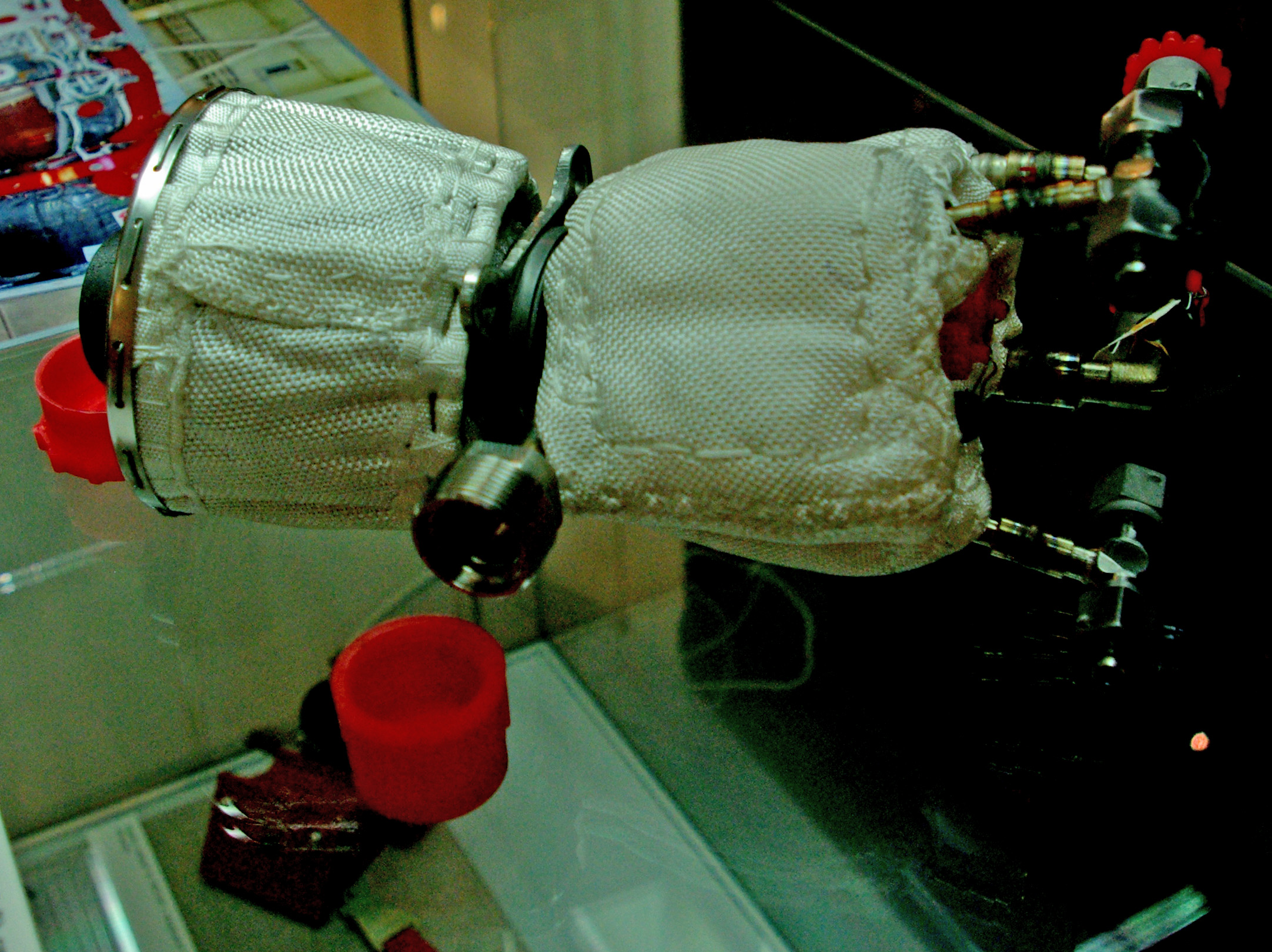
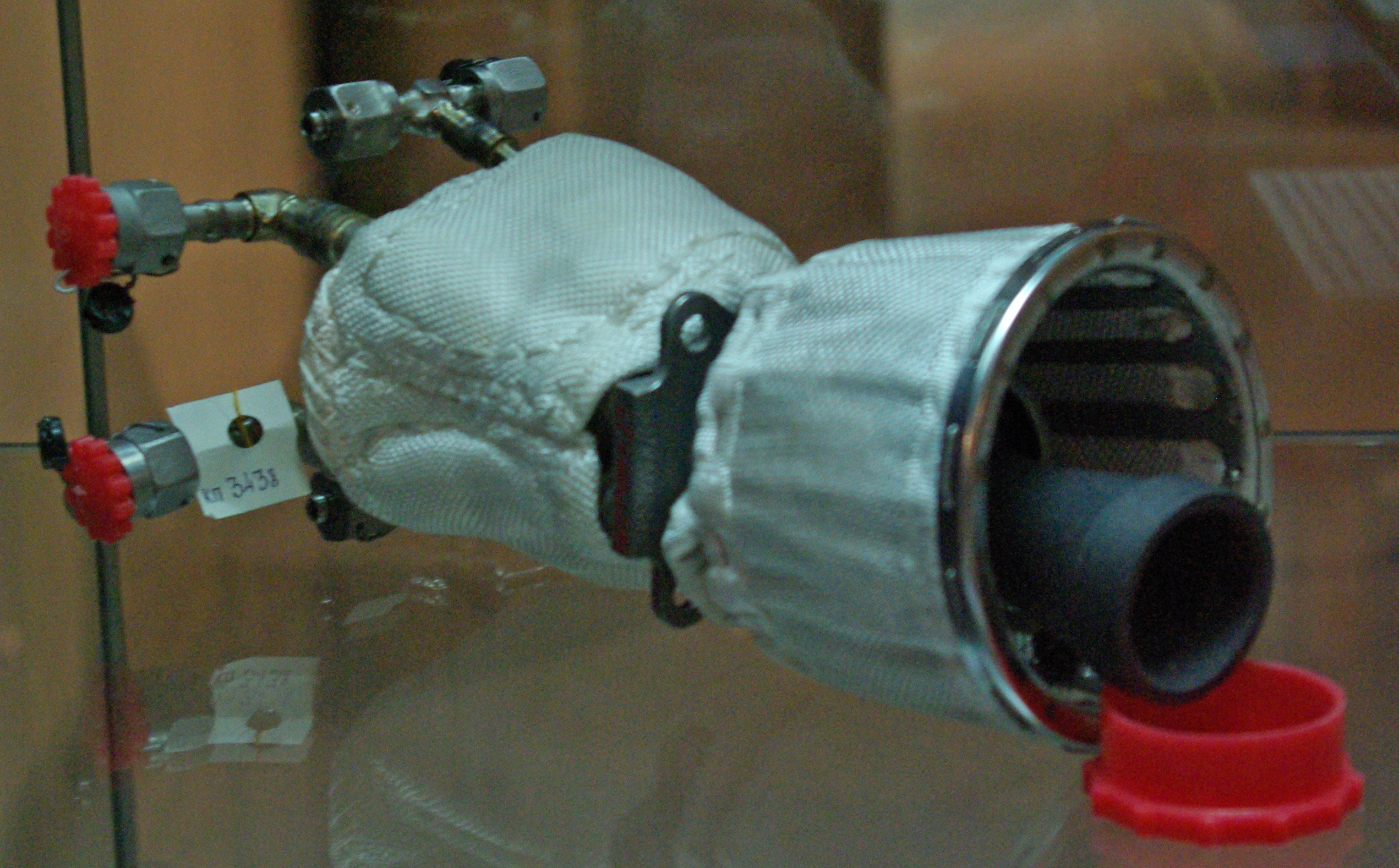
Fig. 3.2.1 : Le moteur 11D427M. 
Fig. 3.2.1.B : La chambre d'un moteur 11D427M. A partir de Soyouz TM-23 (11F732A51 n°72), ce sont des moteurs S5.142 (DST-25), toujours fournis par le KB KhimMach, qui sont utilisés. Alors que la chambre de combustion du 11D427M était en graphite, celle du S5.142 est en alliage de niobium, et elle est recouverte d'un revêtement réfractaire [4]. En revanche, le S5.142 n'est pas équipé de capteur de pression dans sa chambre de combustion. Il a donc fallu développer une nouvelle version de l'algorithme de contrôle des DPO-M, qui a été testée en vol à partir de Soyouz TM-20. Auparavant, seuls les DPO-M pouvaient être utilisés pour orienter le Compartiment des Instruments (PAO) après son largage. Avec le nouvel algorithme, les moteurs DPO-B peuvent aussi être utilisés en secours [5]. - 14 moteurs DPO-B de forte poussée (13,3kgf), numérotés 13 à 26. Ils servent à la fois pour orienter le vaisseau et pour réaliser des corrections d'orbite. En effet, en temps normal les corrections sont réalisées par le moteur principal SKD, mais pour certaines manœuvres d'approche, il est jugé préférable d'utiliser les DPO-B, qui sont moins économiques mais plus précis. En cas de défaillance du SKD, les DPO-B peuvent également assurer la rentrée dans l'atmosphère en redondance. Les premiers vaisseaux Soyouz TM ont repris les moteurs 11D428A du NIIMach qui étaient déjà utilisés sur les vaisseaux Soyouz T. Avant le lancement de Baïkonour, les réservoirs du KDU sont remplis en tenant compte du fait que les DPO-B doivent pouvoir effectuer la rentrée dans l'atmosphère en cas de défaillance du SKD. Ils comprennent donc une réserve d'urgence qui en temps normal n'est pas utilisée, et qui constitue donc un poids mort. Sur demande de RKK Energiya, le NIIMach lance en 1993 le développement d'une nouvelle version de son moteur appelée 11D428A-16 (RDMT-135M), aux performances améliorées. Le but est de conserver les mêmes capacités qu'avec la version précédente, mais en consommant moins d'ergols, afin de diminuer le poids mort dans les réservoirs [6]. 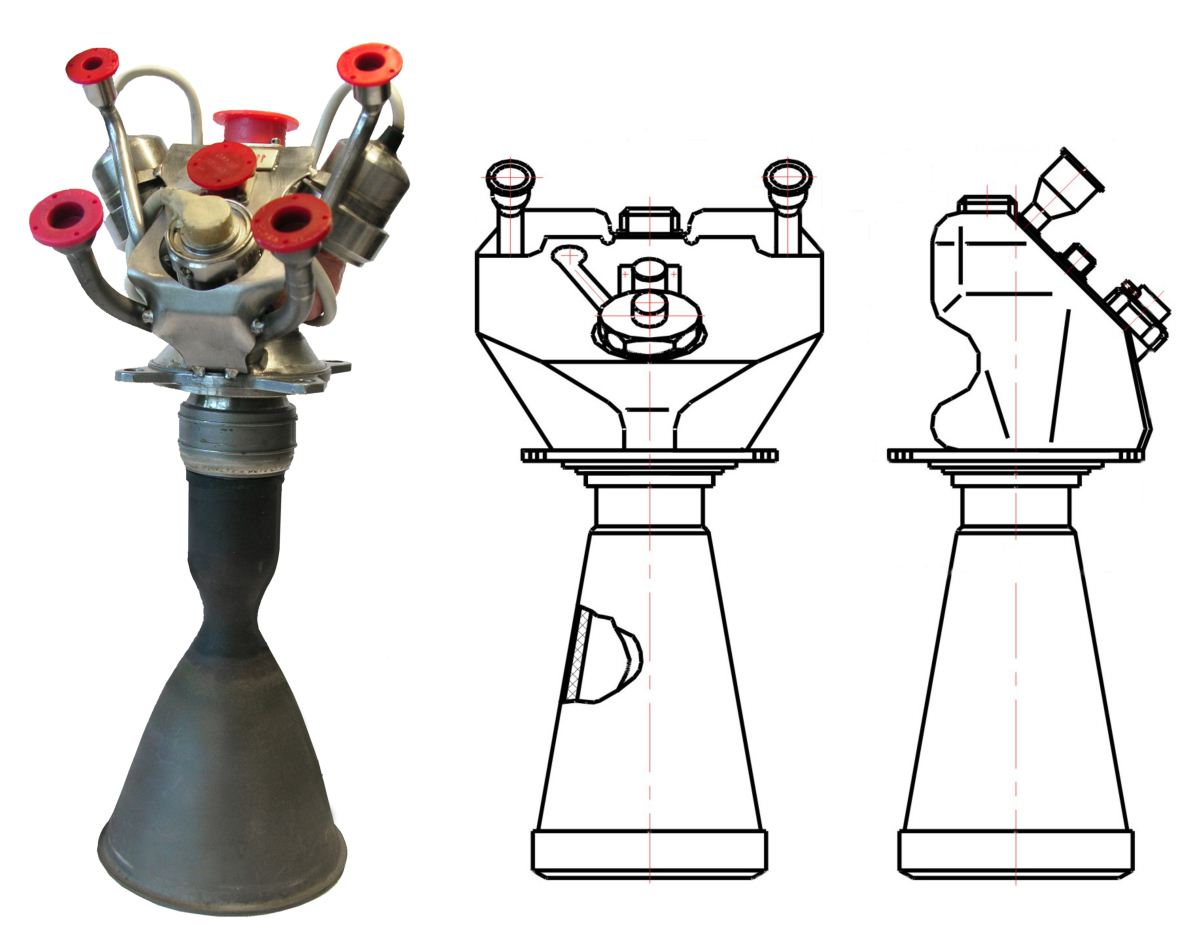
Fig. 3.2.2 : Le moteur 11D428A-16 du NIIMach. Avant d'utiliser les nouveaux moteurs sur les vaisseaux Soyouz TM, RKK Energiya préfère les tester sur des vaisseaux Progress M. Trois vaisseaux,
Progress M-36, Progress M-37 et
Progress M-38, volent ainsi avec des moteurs 11D428A-16 sur l'une de leurs deux voies. 

Fig. 3.2.3 : Le moteur 11D428A-16. En 1998, le moteur 11D428A-16 est donc prêt pour équiper les vaisseaux habités. C'est le vaisseau Soyouz TM-28 (11F732A51 n°77) qui est le premier à voler avec, en août 1998. L'utilisation du nouveau moteur permet d'économiser 30kg d'ergols. 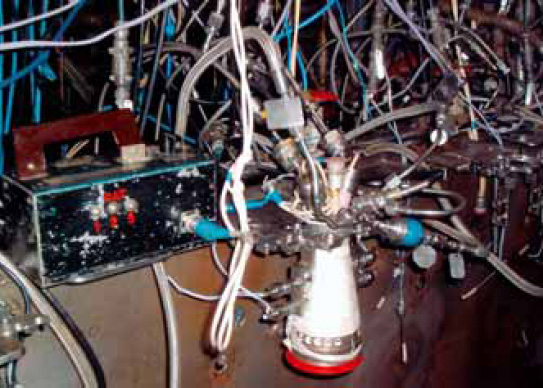
Fig. 3.2.5 : Essai au sol d'un moteur 11D428A-16. Les vingt-six moteurs DPO sont disposés tout autour du Compartiment des Machines et des Instruments (PAO), à l'avant et à l'arrière. A l'arrière du vaisseau, quatre groupes de moteurs sont positionnés autour du moteur principal SKD. Chaque groupe comprend :
- un DPO-B, qui fait un angle de 20° avec l'axe longitudinal du vaisseau, 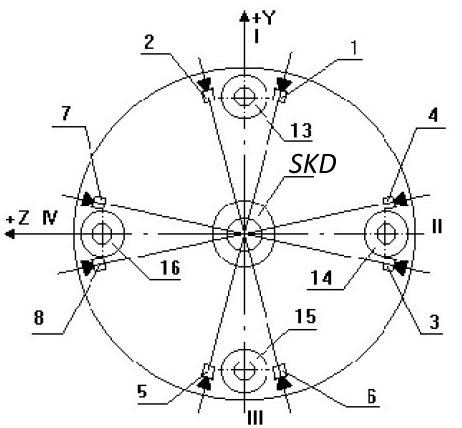
Fig. 3.2.6 : Schéma de l'arrière du vaisseau Soyouz TM. 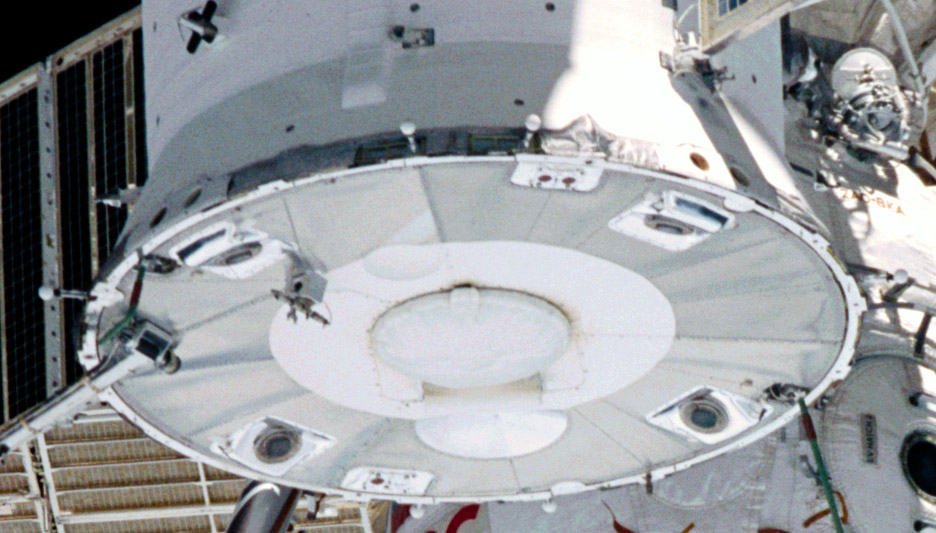
Fig. 3.2.7 : L'arrière du vaisseau Soyouz TM-33 amarré à la Station Spatiale Internationale. Il y a aussi quatre groupes de moteurs au niveau du Compartiment de Transfert (PKhO), près de l'interface avec le Compartiment de Descente (SA) :
- deux de ces groupes sont constitués de deux DPO-M et de trois DPO-B, 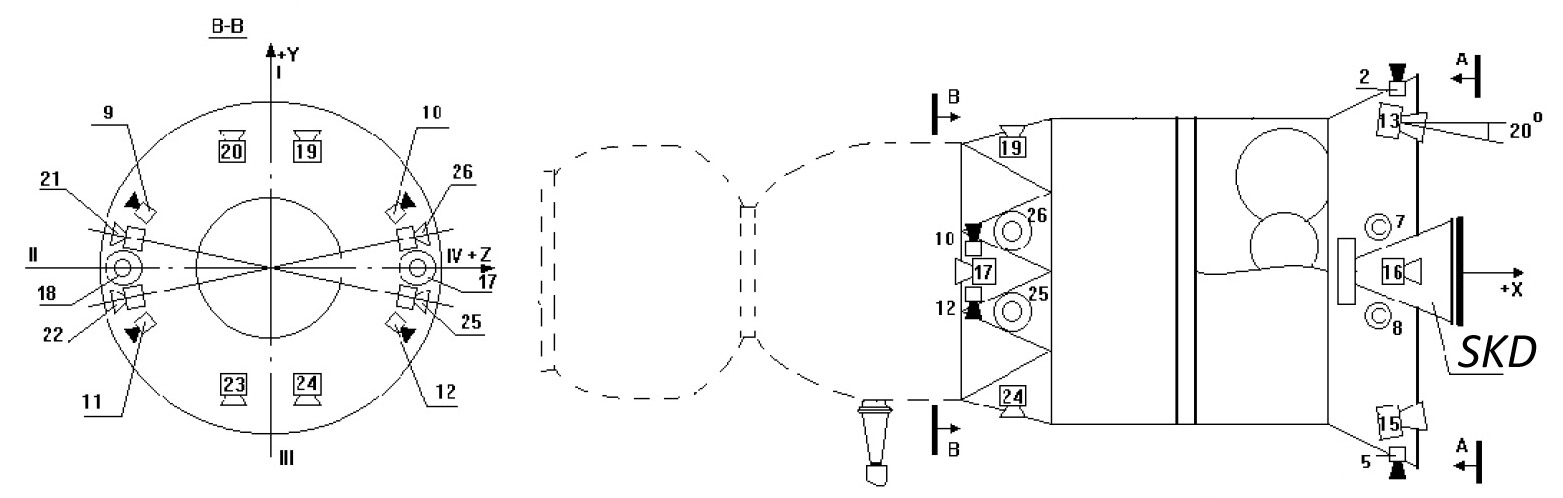
Fig. 3.2.8 : Disposition des moteurs DPO sur le PKhO du vaisseau Soyouz TM. 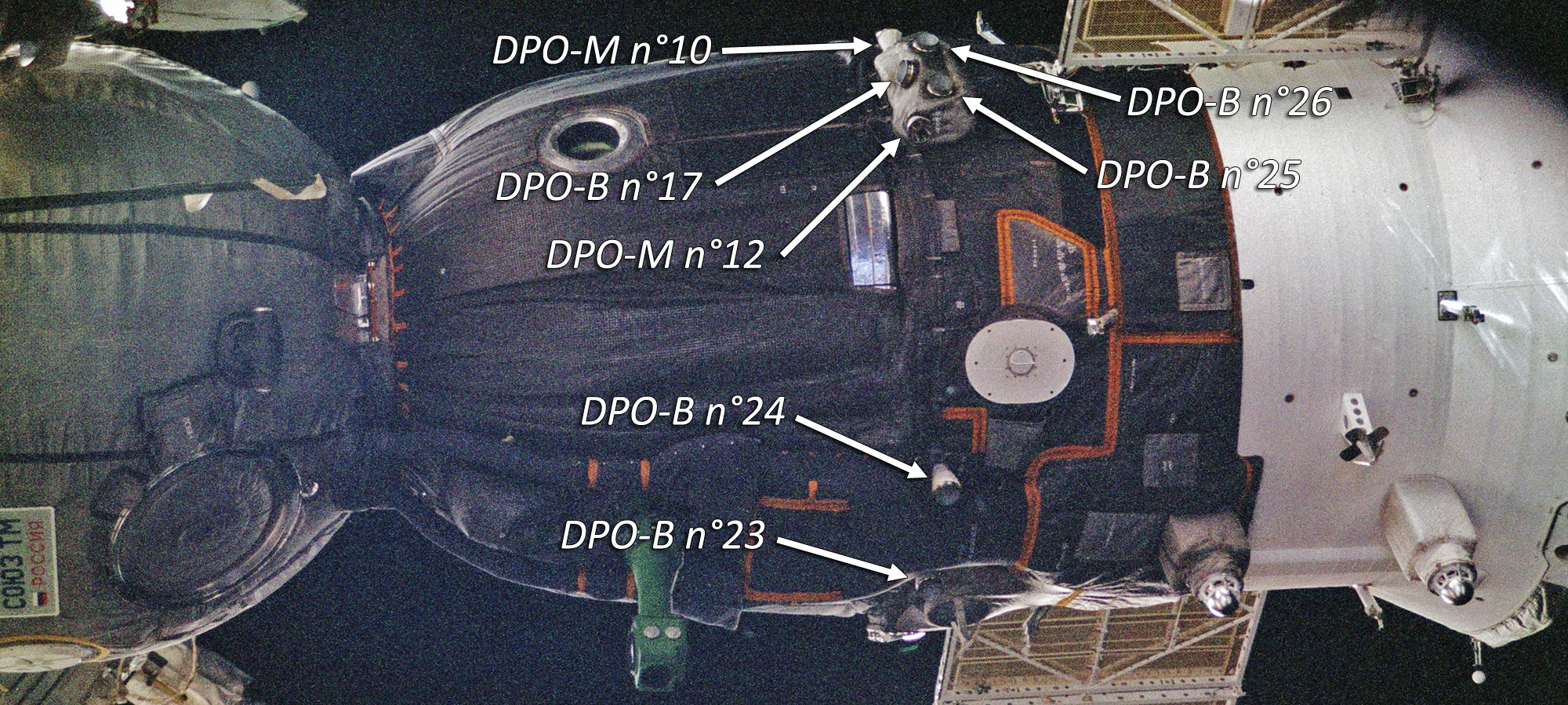
Fig. 3.2.9 : Disposition des moteurs DPO sur le vaisseau Soyouz TM-33. 
Fig. 3.2.10 : Un groupe de moteurs DPO sur le PKhO. 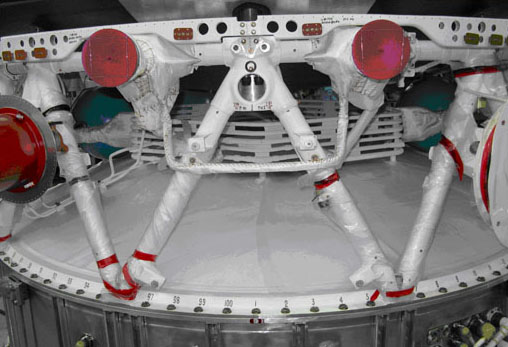
Fig. 3.2.11 : Les moteurs DPO-B n°23 et n°24 sur le PKhO. 
Fig. 3.2.12 : Deux moteurs DPO-B. Pour augmenter la fiabilité, l'alimentation en ergols des DPO est séparée en deux voies distinctes. La voie 1 alimente les DPO-B ainsi que la moitié des DPO-M (le groupe DPO-M1, constitué des moteurs avec un numéro impair). La voie 2 alimente le second groupe DPO-M2 (moteurs avec un numéro pair). La voie 1 est alimentée par les réservoirs BO1 et BG1, et la voie 2 par les réservoirs BO2 et BG2. Il est possible de relier les deux voies en ouvrant les vannes EKO3 et EKG3. 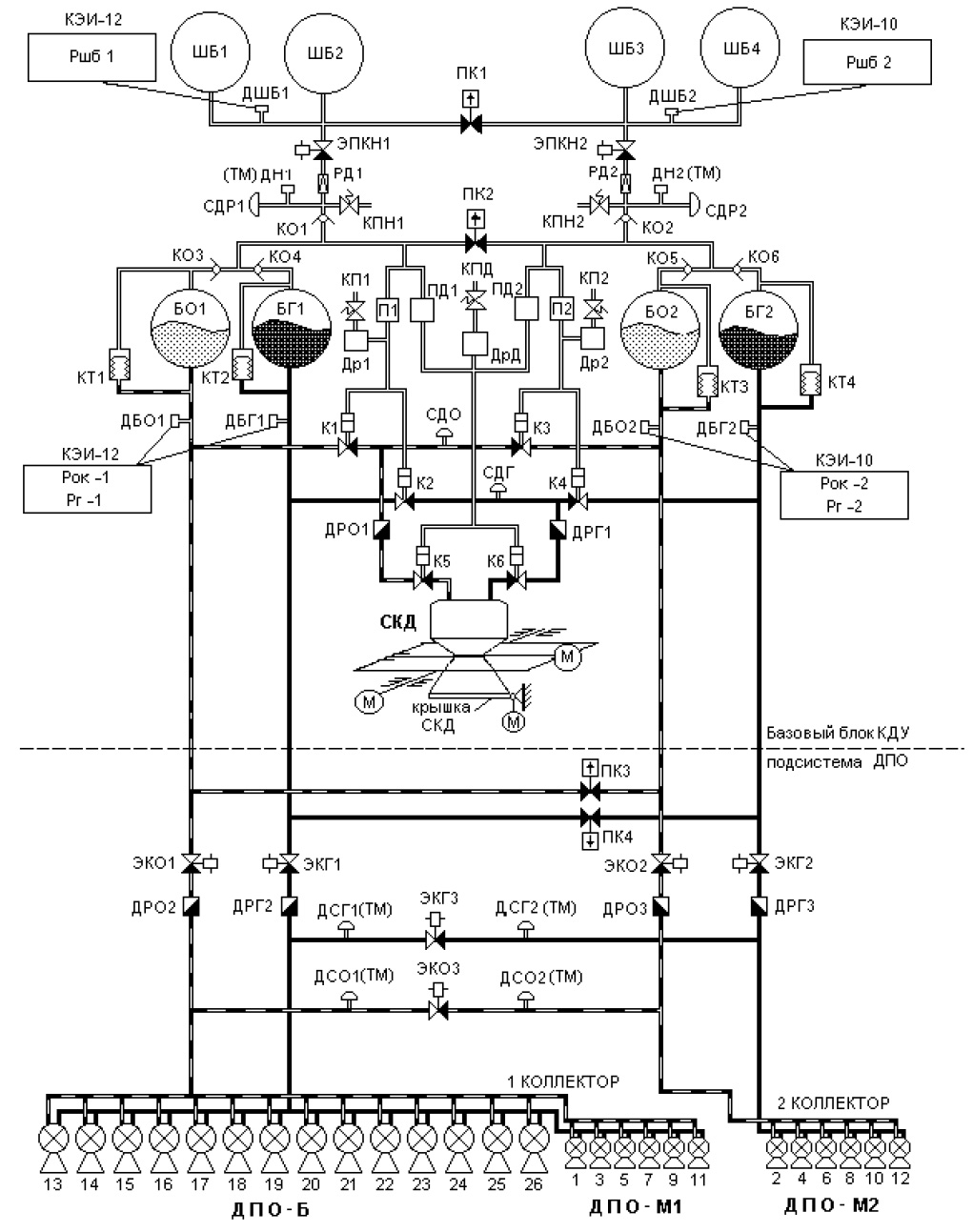
Fig. 3.2.13 : Schéma du système KDU du vaisseau Soyouz TM. 

Fig. 3.2.14 : Un moteur 11D428A-16. 4. Les vaisseaux Soyouz TMALes vaisseaux Soyouz TMA (11F732A17) reprennent le système de propulsion KDU de la version précédente Soyouz TM (11F732A51). 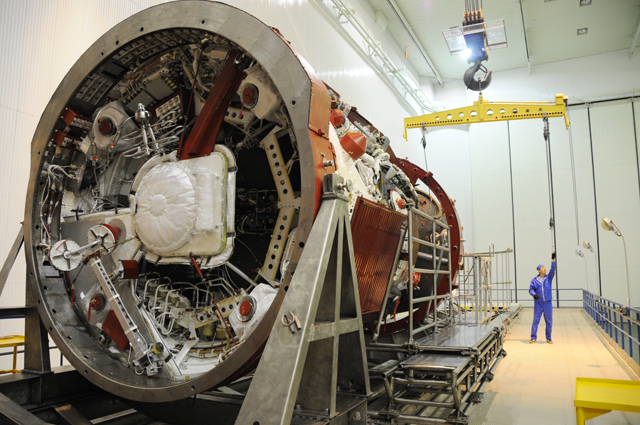
Fig. 4.1 : L'arrière du vaisseau Soyouz TMA-20. Toutefois, une modification a été apportée en vue d'améliorer la sécurité lors des amarrages à la Station Spatiale Internationale. En effet, jusque là, en cas d'incident lors de l'approche finale, le vaisseau n'avait que deux moteurs pour faire marche arrière rapidement, les moteurs DPO-B n°17 et 18, qui sont tournés vers l'avant. La RKK Energiya a décidé de rajouter deux moteurs supplémentaires, les DPO-B n°27 et 28 alimentés par la voie 2. Cette idée a été étudiée dès 2001 et a été formellement approuvée le 23 octobre 2002 [7]. Le premier vol a eu lieu sur Soyouz TMA-5 en octobre 2004. 
Fig. 4.2 : Vue des moteurs DPO du vaisseau Soyouz TMA-11. Lors du vol du vaisseau Soyouz TMA-3, une fuite sur l'une des deux voies du circuit d'hélium est détectée lors de l'approche de la Station Spatiale Internationale. Elle n'aura pas de conséquence sur la suite de la mission. 
Fig. 4.3 : Vue du vaisseau Soyouz TMA-20 en orbite. 5. Les vaisseaux Soyouz TMA-MLe système KDU des vaisseaux de nouvelle génération Soyouz TMA-M (11F732A47), qui desservent la Station Spatiale Internationale, est pour l'instant inchangé par rapport au KDU des Soyouz TMA. 
Fig. 5.1 : Préparation du moteur S5.80 du vaisseau Soyouz TMA-02M. 
Fig. 5.2 : Vue de deux des moteurs DPO-M du vaisseau Soyouz TMA-02M. La RKK Energiya avait prévu de modifier l'arrangement des moteurs DPO-B. C'est le vaisseau Soyouz TMA-11M qui devait inaugurer cette modification à la fin 2013 [8], mais elle a été reportée à une date ultérieure. 6. Les vaisseaux Soyouz MSLa version Soyouz MS (11F732A48) est l'objet de modifications profondes de son système de propulsion KDU. L'objectif est d'améliorer la redondance du système en cas de perte cumulée de deux moteurs DPO, en prenant en compte le cas où l'une des deux voies est totalement défaillante, par exemple suite à une brèche dans l'un de ses réservoirs. Comme sur les Soyouz TMA et Soyouz TMA-M, le Soyouz MS possède un moteur SKD et vingt-huit moteurs DPO. Mais, contrairement à ses deux prédécesseurs, ces derniers sont tous des DPO-B. Les douze DPO-M sont donc supprimés, et remplacés par douze DPO-B supplémentaires. Les moteurs sont disposés : - sur le PKhO en deux groupes de quatre et deux groupes de six, 
Fig. 6.1 : Le PKhO d'un vaisseau Soyouz MS, 
Fig. 6.2 : L'arrière d'un vaisseau Soyouz MS, avec huit moteurs DPO-B. 7. Récapitulatif
Bibliographie
[1] SYROMIATNIKOV, V., 100 Stories about Docking, Vol. 1 Dernière mise à jour : 14 janvier 2018 |
|