7K-L1 | Descriptif technique1. GénéralitésLe vaisseau 7K-L1, développé et construit par l'OKB-1, est destiné à envoyer un équipage de deux cosmonautes sans scaphandre sur une trajectoire de survol de la Lune, sans mise sur orbite lunaire. Il est dérivé du vaisseau Soyouz (11F615) et est constitué d'un Compartiment des Machines et des Instruments PAO (Приборно-Агрегатный Отсек), d'un Compartiment de Descente SA (Спускаемый Аппарат) et d'un Cône de Support Largable SOK (Сбрасиваемый Опорный Конус). 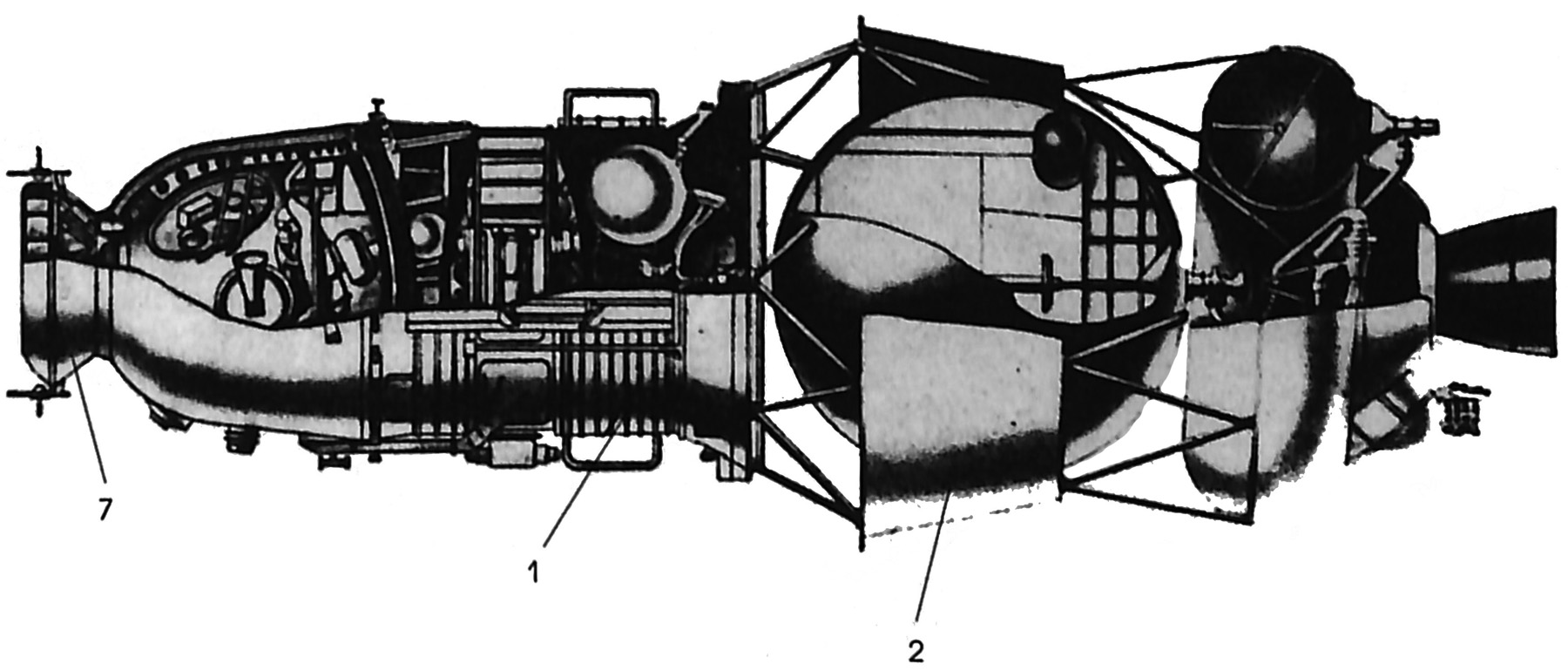
Fig. 1.1 : Schéma du vaisseau 7K-L1 sur le Bloc D. Le vaisseau a une masse au lancement comprise entre 5200kg et 5700kg en fonction de la mission. Il a une longueur totale de 4796mm [22] et un diamètre maximal de 2720mm. L'envergure une fois les panneaux solaires déployés est de 9m. Le vaisseau peut endurer des missions d'une durée maximale de huit à dix jours [7]. Le SA a une masse au lancement de 3100kg et un diamètre de 2183mm [7][22]. C'est lui qui abrite l'équipage, le pupitre de commande, le bouclier thermique, les moteurs d'orientation pour la rentrée et le parachute. Il offre un volume habitable de 5,5m3 [22]. 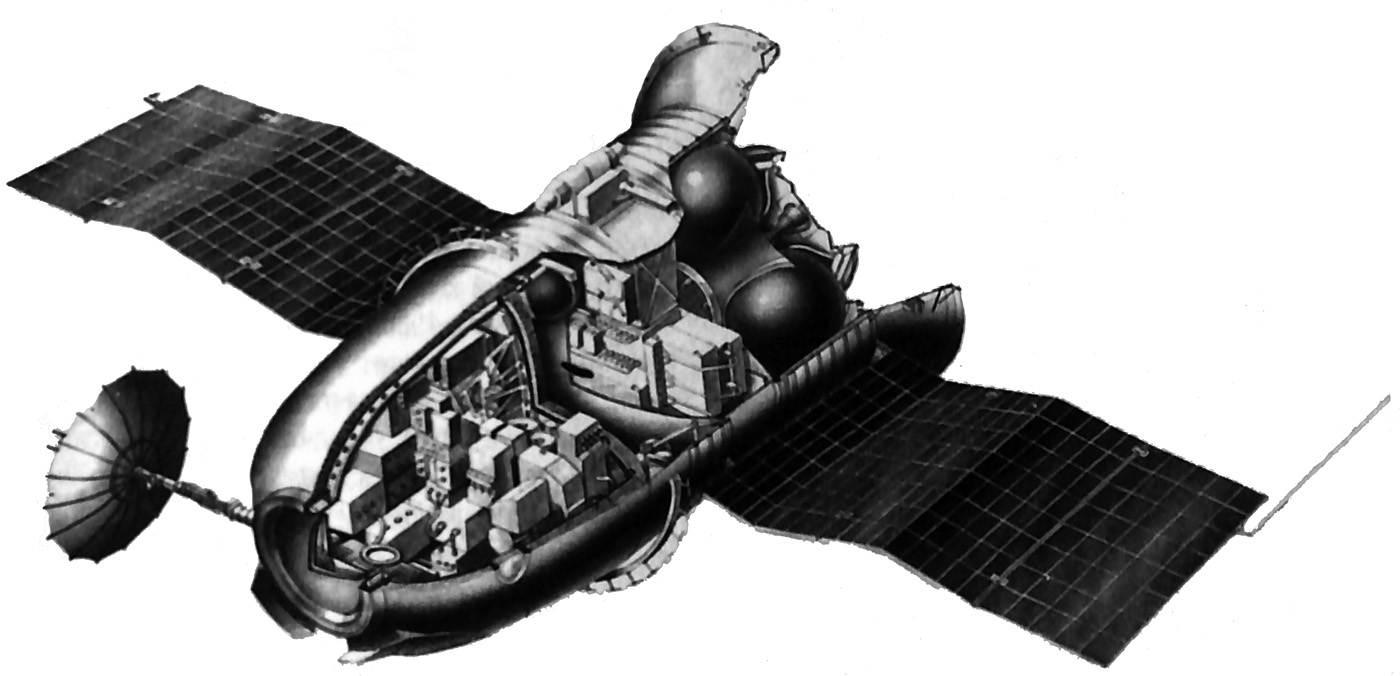
Fig. 1.2 : Ecorché du vaisseau 7K-L1. Le PAO a une masse au lancement de 2250kg [7]. Il abrite principalement l'ensemble moteur et les panneaux solaires. Le cône largable, quant à lui, a une masse de 150kg [7]. 2. Profil de mission2.1. Lancement et mise sur orbite terrestreLe vaisseau 7K-L1 est mis sur orbite terrestre basse (191km x 219km x 51,5°) [24] au moyen d'un lanceur Proton-K (8K82K) surmonté d'un étage supérieur Bloc D (11S824). La masse totale à satelliser est de 19040kg (5680kg pour le vaisseau 7K-L1 et 13360kg pour le Bloc D [1]. 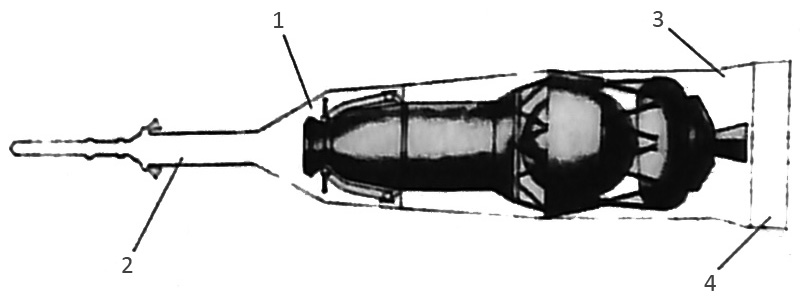
Fig. 2.1.1 : Schéma du 7K-L1 et du Bloc D sous la coiffe du lanceur Proton-K. Afin d'optimiser les performances du lanceur, son troisième étage n'est pas mis sur orbite et retombe dans l'océan Pacifique au-delà du Japon. La première vitesse cosmique est atteinte au moyen d'un premier allumage du Bloc D. Ce profil de vol permet de gagner plusieurs centaines de kilogrammes sur la masse du vaisseau. Le deuxième et dernier allumage du Bloc D permet d'atteindre une vitesse proche de la deuxième vitesse cosmique [1].
2.2. Vol entre la Terre et la LuneUne fois le deuxième allumage du Bloc D réalisé, le vaisseau 7K-L1 est en route vers la Lune. Le Bloc D est largué, ainsi que le cône SOK. Une correction de trajectoire est réalisée à environ 300.000km de la Terre (l'instant précis est calculé en fonction des paramètres de la mission) afin de ralentir le vaisseau. 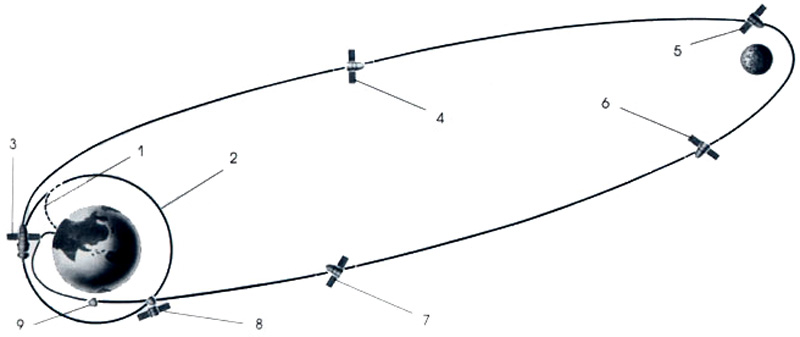
Fig. 2.2.1 : Schéma d'une mission du 7K-L1. Commence alors une phase balistique qui amène le 7K-L1 à contourner la Lune. La distance minimale avec la surface est de l'ordre de 2000km. Une deuxième correction est ensuite réalisée afin d'accélérer vers la Terre, et une troisième permet d'amorcer la rentrée dans l'atmosphère de celle-ci. Le PAO est ensuite largué. 2.3. Le retour sur TerreLe SA aborde l'atmosphère avec une vitesse proche de la deuxième vitesse cosmique (environ 11,2km/s), et il est donc soumis à de fortes contraintes aérodynamiques. Il doit rester à l'intérieur d'un couloir de rentrée compris entre 35km et 55km [15] :
- sa limite supérieure est définie par la décélération minimale qui permet au vaisseau d'atteindre une vitesse inférieure à la première vitesse cosmique, 
Fig. 2.3.1 : Schéma du couloir de rentrée. Comme le montre la figure 2.3.1, le couloir de rentrée est caractérisé soit par l'angle Θ0 que la trajectoire fait avec l'horizontale locale, soit par l'altitude Hπ du périgée à laquelle la trajectoire amènerait le vaisseau sans tenir compte de l'atmosphère. La largeur du couloir est fonction de la finesse aérodynamique du vaisseau qui, pour le 7K-L1, a une valeur de 0,3. Afin de pouvoir atterrir sur le territoire soviétique, le SA effectue sa rentrée dans l'atmosphère en deux étapes. La première étape consiste à atteindre une vitesse inférieure à la première vitesse cosmique en respectant le couloir de rentrée, et la seconde consiste à utiliser sa portance pour reprendre de l'altitude. Cela lui permet de prolonger sa trajectoire d'environ 10.000km [15]. 
Fig. 2.3.2 : Schéma du profil de rentrée du 7K-L1. La précision se joue principalement lors de la première étape, où une erreur de 1° sur l'angle de rentrée a un impact de ±2500km sur le point d'impact. La seconde étape permet d'affiner de ±350km. La décélération subie par le vaisseau est comprise entre 5 et 7g [15]. En cas de dysfonctionnement du Système de Navigation Autonome, le SA peut atterrir en mode balistique. Il ne réalise alors pas de manœuvre de rebond et subit une décélération de 15 à 16g [15]. 
Fig. 2.3.3 : Schéma du profil de rentrée en mode balistique du 7K-L1. 3. MotorisationLe vaisseau 7K-L1 est équipé d'un ensemble moteur KTDU-53 (11D421) destiné à réaliser les corrections de trajectoire entre la Terre et la Lune, ainsi qu'à assurer le freinage avant la rentrée dans l'atmosphère. Il est constitué d'un moteur S5.53 utilisant de l'UDMH comme carburant et de l'AK-27I comme comburant (il s'agit d'un mélange d'acide azotique et de tétraoxyde d'azote). 
Fig. 3.1 : Le moteur S5.53 du 7K-L1. Le S5.53 a une poussée de 410kgf et dispose, en plus de sa tuyère principale, de quatre tuyères verniers qui lui permettent de contrôler l'orientation du vaisseau pendant ses phases de fonctionnement. La masse d'ergols embarquée est de 400kg [7]. Par rapport au vaisseau Soyouz, le 7K-L1 ne possède ni moteur de secours, ni moteurs d'orientation DPO ou DO. 4. Système de sauvetage d'urgenceLe vaisseau 7K-L1 est équipé d'un Système de Sauvetage d'Urgence SAS (Система Аварийного Спасения) qui permet de préserver le Compartiment de Descente et l'équipage en cas d'échec du lanceur Proton-K. Il est constitué d'une tour d'éjection 11D836 fournie par l'usine MMZ Iskra. Elle est dérivée de la tour 11D828 du vaisseau Soyouz [2]. Afin d'assurer la stabilité du vaisseau pendant sa retombée suite à une éjection, la coiffe du lanceur est munie de quatre panneaux cellulaires. 
Fig. 4.1 : Schéma de la tour d'éjection 11D836. La tour 11D836 a une hauteur de 5940mm, un diamètre de 1400mm et une masse de 2070kg. Elle abrite deux moteurs à ergols solides. Le moteur principal TsRD (Центральный ракетный двигатель) est destiné à éjecter le vaisseau en cas d'échec. Il a une masse de 1750kg et fournit une poussée comprise entre 490kN et 899kN, pour une impulsion totale de 1666kN.s [3]. Le moteur RDR (Ракетные двигатели разделения) permet d'éloigner la coiffe du SA après que celui-ci a été extrait du lanceur et amené à une distance de sécurité. Lors d'un lancement nominal, il permet d'éjecter la tour d'éjection. Il fournit une poussée comprise entre 83,9kN et 156,8kN, pour une impulsion totale de 129,48kN.s. Sa masse est de 312kg [3]. 
Fig. 4.2 : La tour d'éjection 11D836. Par ailleurs, quatre moteurs de contrôle URD (Управляющие ракетные двигатели), dirigés latéralement, permettent de déporter la trajectoire du vaisseau pendant le fonctionnement du moteur TsRD. 5. TélécommunicationsLes vaisseaux 7K-L1 communiquent avec la Terre à l'aide du complexe DRK (Дальний Радиокомплекс), qui regroupe le système embarqué DRS et l'ensemble de stations sol Saturn-MS [4]. Le DRK a été testé en conditions réelles sur deux sondes E-6LS : Cosmos 159 et Luna-14. 5.1. Le système DRSIl est constitué d'un émetteur, du système de télémétrie BR-9-7 [6] fourni par le RNII KP, d'une antenne parabolique directionnelle (ONA) et d'une antenne omnidirectionnelle [25]. Les transmissions de et vers la Terre sont assurées au moyen d'une antenne parabolique déployée après le lancement, et larguée avant la rentrée dans l'atmosphère. 5.2. Les stations Saturn-MSQuatre stations Saturn-MS sont construites dans le cadre du programme 7K-L1 : la première au NIP-3 de Sary-Chagan au Kazakhstan, la deuxième au NIP-14 de Chtchiolkovo près de Moscou, la troisième au NIP-15 d'Oussouriïsk dans le kraï du Primorié et la quatrième au NIP-16 d'Eupatorie en Crimée [4]. Elles permettent de capter la télémétrie des vaisseaux, de mesurer leur trajectoire, d'envoyer des commandes, de recevoir des images TV et d'assurer les communications audio avec l'équipage. Elles fonctionnent en UHF : 770MHz en liaison montante, et 920MHz en liaison descendante [5]. Toutes les stations Saturn-MS utilisent des antennes paraboliques RS-10-2M, qui permettent à la fois d'émettre et de recevoir, à l'exception de la station du NIP-16 qui utilise une antenne KTNA-200 pour l'émission et une antenne P-200 pour la réception. Les antennes RS-10-2M ont un diamètre de 16m et émettent des signaux avec une puissance de 20kW. Les signaux sont émis en multiplexage fréquentiel [5]. 
Fig. 5.2.1 : L'antenne RS-10-2M de la station Saturn-MS du NIP-14. Plusieurs vaisseaux 7K-L1 étaient également équipés d'un système expérimental de transmission d'images dont les signaux étaient reçus par l'antenne de 32m de diamètre d'Eupatorie [5]. 5.3. Navires de communicationsPlusieurs navires ont été affectés au programme 7K-L1 dans le cadre du projet Selena. Il s'agit du Nevel, du Morzhoviets, du Kegostrov, du Borovitchi, du Kosmonavt Vladimir Komarov, du Bezhitsa, du Dolinsk, du Ristna et de l'Aksaï. 6. Système de contrôleComme on l'a vu au paragraphe 2, la vitesse à laquelle le 7K-L1 amorce sa rentrée dans l'atmosphère lui impose de faire un rebond qui le déporte d'environ 10.000km. L'orientation du vaisseau ne peut donc pas être contrôlée par un système classique qui ne prend en compte que deux paramètres : l'angle d'attaque et la poussée des moteurs. L'OKB-1 a donc décidé de l'équiper d'un système de contrôle innovant basé sur l'utilisation d'un ordinateur embarqué, ce qui constitue une première en Union soviétique. Le système est développé sous la maîtrise d'œuvre du NPTs AP de Nikolaï PILIOUGUINE. Il est constitué d'un certain nombre de capteurs qui envoient leurs données à un ordinateur, et ce dernier en déduit l'orientation à donner au vaisseau. 6.1. L'ordinateur de bordL'ordinateur de bord du 7K-L1 est un Argon-11S développé par le NIEM de Sergueï KROUTOVSKIKH sous la direction de G.M. PROKOUDAÏEV et N.N. SOLOVIOV. Il a une masse de 34kg et ses dimensions sont 305x305x550mm. Il peut fonctionner pendant 2h40 sans interruption sous des températures de 0 à 40°C et des pressions de 400 à 1000mmHg. Il peut subir des accélérations allant jusqu'à 10G et consomme 75W [11]. 
Fig. 6.1.1 : L'ordinateur Argon-11S. L'Argon-11S est constitué de trois calculateurs redondants. Sa mémoire vive a une capacité de 128 mots de 14 bits, et sa mémoire morte a une capacité de 4096 mots de 17 bits. Il a un temps de calcul de 30μs pour les additions, et de 160μs pour les multiplications [11]. Il utilise le circuit intégré Tropa-1 du NIITT (aujourd'hui Angstrem) de Zelenograd. Il s'agit de l'un des premiers circuits intégrés fabriqués par l'Union soviétique [12]. Avec ces circuits, l'Argon-11S est capable de réaliser 200.000 opérations par seconde. 
Fig. 6.1.2 : Le circuit intégré Tropa-1. 6.2. Les capteursLe 7K-L1 est équipé d'une centrale inertielle trois axes L300 fournie par le NPTs AP. Elle est constituée d'un gyroscope KI99-20A et de deux accéléromètres, appelés TsE199-2 et 142ZhS. Deux accéléromètres supplémentaires, appelés K199-1Zh et L304, servent au contrôle manuel [13]. L'orientation dans l'Espace est réalisée en se basant sur les informations du capteur stellaire 100K, du capteur d'horizon terrestre 101K et du capteur solaire 99K, tous fournis par le TsKB Gueofizika [1]. 7. Rentrée dans l'atmosphère et atterrissageLa descente dans l'atmosphère se fait grâce à un système de parachutes en série. La coupole principale a une surface de 1000m2 [7]. Par rapport au vaisseau Soyouz, le parachute secondaire a été supprimé, réduisant ainsi la masse mais aussi la fiabilité. 
Fig. 7.1 : Intérieur du SA de Zond-7. Le SA du 7K-L1 dispose de huit moteurs pour assurer l'orientation lors de la phase de rentrée dans l'atmosphère. Il s'agit de micromoteurs de 1 à 1,5kgf de poussée fonctionnant au peroxyde d'hydrogène, identiques à ceux du vaisseau Soyouz. Ceux qui contrôlent le roulis ont toutefois été doublés afin d'augmenter la fiabilité [7]. Cette modification sera d'ailleurs reprise sur le vaisseau Soyouz de seconde génération, Soyouz T. 
Fig. 7.2 : Un moteur de contrôle du roulis. Le contact avec le sol est amorti par des Moteurs d'Atterrissage en Douceur (DMP) identiques à ceux du vaisseau Soyouz [7]. Leur allumage à quelques dizaines de centimètres du sol est commandé par un altimètre à rayons gamma fourni par le TsNII RTK et dérivé du système Kaktus de Soyouz [7]. 8. Le pupitre de commandeLe Compartiment de Descente (SA) est équipé d'un pupitre de commande appelé Saturn fourni par le SOKB LII qui sert d'interface entre l'équipage et les systèmes de bord [10]. 
Fig. 8.1 : Schéma du pupitre du 7K-L1. Il est constitué du bloc de boutons de choix du système de contrôle BKS (1), du panneau de signalisation électroluminescent SPE (2), du bloc de boutons des commandes d'alimentation des systèmes BKK (3), du bloc de contrôle des programmes BKP (4), du tableau d'alarmes TSE (5), de l'indicateur de pression et de température IDT (6), de l'indicateur de charge et de courant INT (7), de l'écran KEI (8), de l'horloge BTchK (9), du bloc de choix des paramètres affichés à l'écran (10) et des boutons de réglage du volume (11) [9]. 
Fig. 8.2 : Vue arrière du pupitre du 7K-L1. 
Fig. 8.3 : Le pupitre du 7K-L1. 9. Navigation9.1. GénéralitésOn a vu au paragraphe 2.2 que la rentrée dans l'atmosphère du Compartiment de Descente (SA) du vaisseau 7K-L1 devait impérativement être réalisée dans un certain couloir. Celui-ci est caractérisé par l'altitude du périgée que donne la trajectoire de rentrée sans tenir compte de l'atmosphère, notée Hπ. La précision sur cette altitude doit être de ±10km. Afin de satisfaire cette spécification, le 7K-L1 est équipé d'un Système de Navigation Autonome appelé Alfa, développé sous la maîtrise d'œuvre du TsKBEM, qui lui permet d'aborder l'atmosphère avec la précision suffisante. Ce système, qui n'avait pas été envisagé au début de la conception du vaisseau, s'est avéré nécessaire car les stations de poursuite Saturn-MS, qui peuvent mesurer la trajectoire du vaisseau et lui envoyer des ordres par radio, n'ont pas la précision suffisante [14]. Le système Alfa est constitué du sextant Tsiel, qui permet à l'équipage de déterminer son vecteur vitesse, et de l'ordinateur Saliout-1 qui prend en compte le vecteur vitesse pour donner des ordres de guidage. 9.2. Le sextant TsielDéveloppé par le GOI et produit par le TsKB Arsenal de Kiev [16][17], il permet à l'équipage de mesurer manuellement l'élévation γ de certaines étoiles de référence par rapport aux horizons lunaire ou terrestre [14]. 
Fig. 9.2.1 : Le sextant Tsiel. 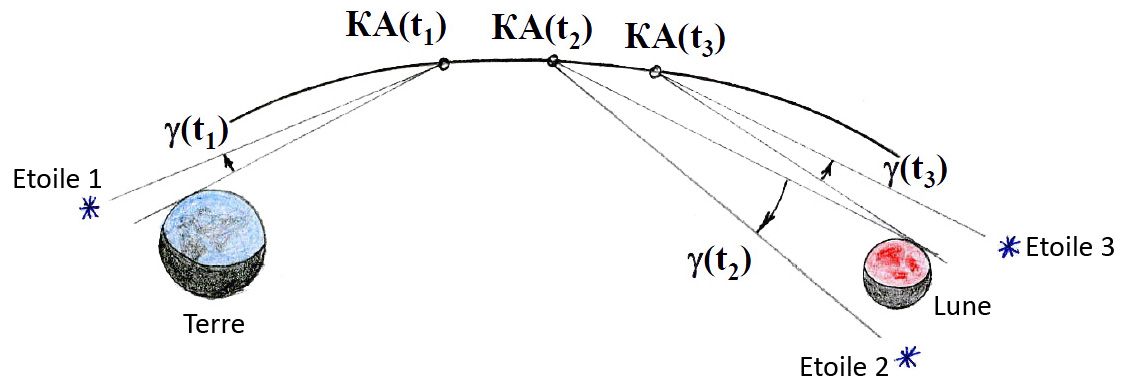
Fig. 9.2.2 : Principe de mesure avec le sextant. 9.3. L'ordinateur Saliout-1Le Saliout-1 (1ST1) est fourni par le NII-335 (aujourd'hui NII Mikropriborov) de Zelenograd. Il a une masse de 15kg, consomme 56W et peut réaliser 500 opérations par seconde [17]. Sa mémoire contient les caractéristiques de 514 étoiles de magnitudes inférieures ou égales à 4. A partir des données relevées par l'équipage à l'aide du sextant, le Saliout-1 détermine les paramètres de l'orbite du vaisseau en utilisant la méthode de Encke [14]. 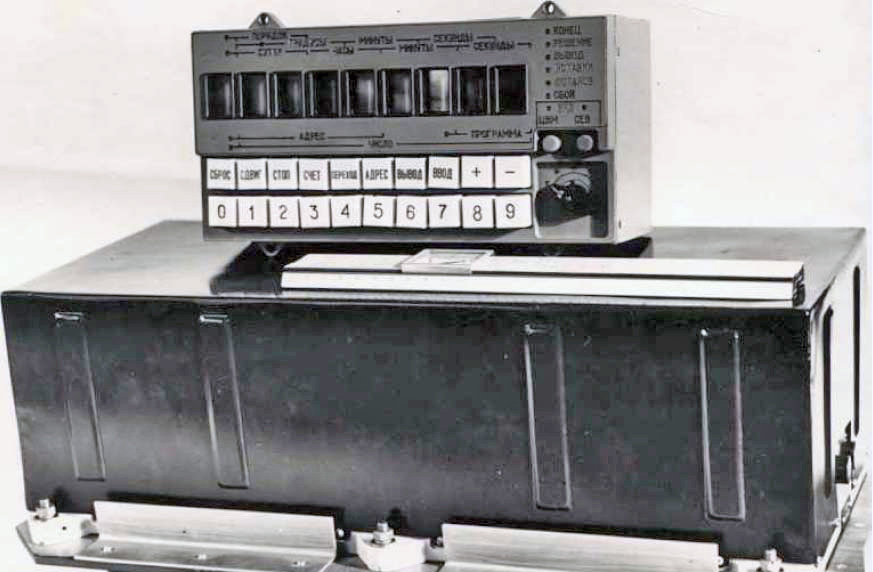
Fig. 9.3.1 : L'ordinateur Saliout-1 du système Alfa et son panneau d'indication. Une fois que l'ordinateur Saliout-1 a déterminé les paramètres de la correction d'orbite à réaliser, ils s'affichent sur le panneau d'indication (1ST2). L'équipage doit alors les recopier manuellement sur le Pupitre de Saisie Manuelle des Paramètres PRVU (Пульт Ручного Ввода Установок), développé au TsKBEM sous la direction de Nikolaï ROUKAVICHNIKOV, futur cosmonaute [17]. 
Fig. 9.3.2 : Le pupitre PRVU du système Alfa. Le PRVU permet de rentrer les paramètres de la correction dans l'ordinateur Argon-11S du Système de Contrôle du vaisseau. 10. Contenu scientifiqueLes vols d'essais inhabités du 7K-L1 ont été l'occasion de faire voler plusieurs instruments scientifiques. 10.1. Les appareils photosLes vaisseaux 7K-L1 ont été équipés de plusieurs appareils photos, qui n'ont vraisemblablement pas tous été embarqués sur chaque vol. L'appareil photo AFA-6A, fourni par l'usine KMZ de Krasnogorsk [18] a volé plusieurs fois. De même, l'appareil BAF-40KM, fourni par le MIIG AiK, a volé au moins sur Zond-6 et Zond-8. Il est dérivé du BAF-40 de KMZ qui était utilisé sur les avions de reconnaissance. Sur le 7K-L1, il réalise deux séances à chaque vol : une pour la face cachée, et une avec l'horizon lunaire et la Terre au loin [19]. Par ailleurs, l'usine TsKB Arsenal de Kiev fournit aussi l'appareil SKD [20]. Si un équipage avait volé sur le 7K-L1, il aurait été équipé de l'appareil photo Saliout-1M muni d'un objectif Taïr-33S, ainsi que d'une caméra vidéo 16LK-K1, tous fournis par KMZ. 
Fig. 10.1.1 : La caméra 16LK-K1. 10.2. Les expériences biologiquesLe vaisseau Zond-5 a emporté deux tortues de Horsfield de 40 grammes chacune, ainsi que plusieurs centaines de mouches, des œufs de mouches Drosophilidae, des ténébrions meuniers (un coléoptère), des salades, des algues et des bactéries [21]. 
Fig. 10.2.1 : Les deux tortues de Zond-5 après leur retour sur Terre. D'autres tortues ont été embarquées sur Zond-7 et Zond-8 [21]. 10.3. Les expériences de physiqueLes 7K-L1 inhabités ont été équipés de détecteurs permettant d'évaluer le taux de radiations auquel seront soumis les cosmonautes lors du voyage lunaire. Certains disposaient également d'un détecteur de micrométéorites, ainsi que d'instruments destinés à l'étude du Soleil [21]. Notes et bibliographie
[1] SEMIONOV, Y., РКК Энергия 1946-1996, pp. 232-247 Dernière mise à jour : 29 août 2018 |
|