SSVP | Descriptif techniqueAu cours des années 1960, le système d'amarrage de première génération dont était équipé le vaisseau Soyouz a très vite montré ses limites. Il permettait simplement de relier mécaniquement deux vaisseaux mais ne disposait pas de tunnel pour que les cosmonautes puissent passer de l'un à l'autre. Le développement d'un système équipé d'un tunnel de transfert et d'une écoutille est devenu indispensable dans la perspective d'exploiter des stations orbitales de longue durée. Ce nouveau système, baptisé SSVP, a équipé tous les vaisseaux Soyouz (11F615A8 et 11F615A9), Soyouz T, Soyouz TM (sauf Soyouz TM-16), Soyouz TMA, Soyouz TMA-M et Soyouz MS. 1. GénéralitésLe principe général du SSVP est simple. Le mécanisme tige-cône du système d'amarrage de première génération est conservé. La tige du vaisseau actif vient s'insérer et se bloquer dans le cône du vaisseau passif. Mais chacun des deux vaisseaux possède aussi un anneau métallique muni de verrous. Une fois la jonction tige-cône réalisée, les verrous s'actionnent, et les deux anneaux sont solidaires. Dès lors, le mécanisme tige-cône n'est plus utile. Il est monté sur une écoutille, que les cosmonautes peuvent maintenant ouvrir pour passer d'un vaisseau à l'autre. 
Fig. 1.1 : Un système SSVP est constitué de deux ensembles : La partie active du SSVP, celle que l'on trouve à l'avant du vaisseau Soyouz, est appelée ASA (Активный Стыковочный Агрегат). Elle a une masse de 200kg. La partie passive, celle qui est sur la station orbitale, est appelée PSA (Пассивный Стыковочный Агрегат). Vidéo 1.1 : Principe de fonctionnement du système SSVP. Les opérations d'amarrage sont gérées par un boîtier électronique appelé ABU (Активный Блок Управления), situé dans le placard du Compartiment de Vie (BO). 2. Le mécanisme tige-côneCe mécanisme, appelé StM (Стыковочный Механизм), a été rendu considérablement plus compact que sur le système de première génération. Il est constitué principalement d'une tige sur l'ASA, qui vient s'insérer dans un cône sur la PSA. La tige est une vis à billes (ChVP), décrite plus en détail dans la section sur le système d'amarrage de première génération. 2.1. La tigeQuand le vaisseau Soyouz est mis en orbite, la tige est en position rétractée. Elle est déployée pendant la phase d'approche au moyen d'un moteur électrique appelé PSM (Привод Стыковочного Механизма). Le PSM est commandé par un boîtier électronique appelé Bloc de Commutation du Mécanisme d'Amarrage, ou BK-SM (Блок Коммутации Стыковочного Механизма). 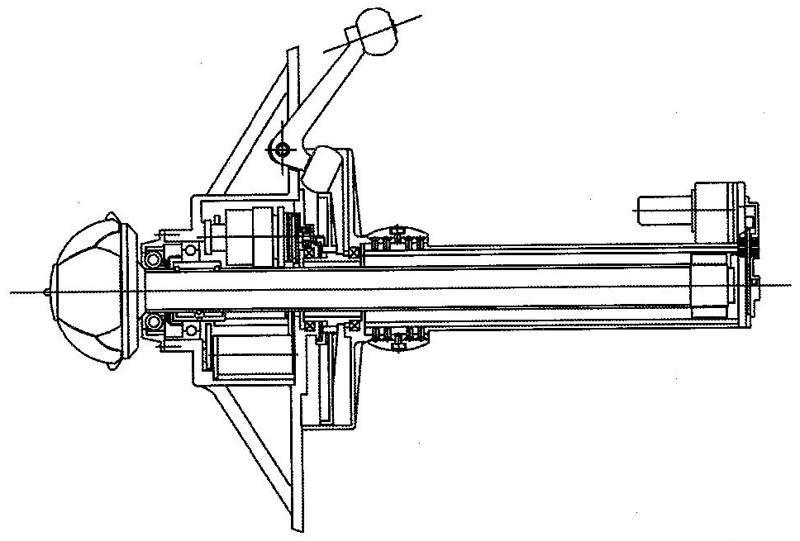 Fig.
2.1.1 : Schéma du mécanisme
tige-cône de l'ASA (tige rétractée). C'est le système de rendez-vous automatique qui amène le vaisseau à proximité de la station orbitale. Sur les vaisseaux Soyouz et Soyouz T, ce système était appelé Igla. A partir de Soyouz TM, le système utilisé, appelé Kours, est beaucoup plus performant. Le système de rendez-vous guide donc le vaisseau jusqu'à ce que la tige de l'ASA s'insère dans le cône du PSA. 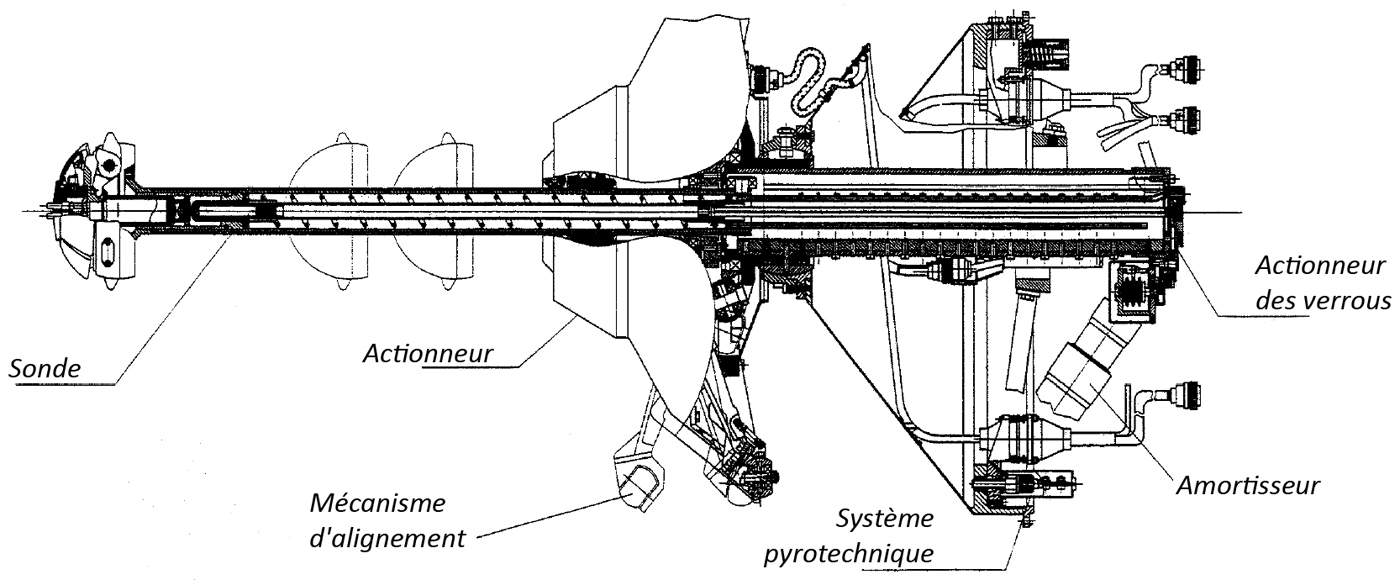 Fig.
2.1.2 : Schéma du mécanisme
tige-cône de l'ASA (tige déployée). Le cône permet de guider naturellement la tige vers le centre de la partie passive, où est disposée une prise dans laquelle vient s'insérer la tête de la tige. Trois leviers déployables, situés à la base du mécanisme, permettent d'éviter une trop forte déviation angulaire du vaisseau, et ainsi de conserver un alignement correct. A l'origine, ces leviers d'alignement étaient au nombre de quatre, et ils étaient nus (Fig. 2.2.3 et 2.2.4). Mais le premier vol du SSVP s'est soldé par l'échec de l'amarrage de Soyouz-10 à la station Saliout, dû à une déformation du mécanisme. Suite à cela, les ingénieurs ont rajouté un jabot, c'est-à-dire une structure métallique destinée à protéger le mécanisme contre d'éventuels efforts potentiellement déformants. 
Fig. 2.1.3 : Le vaisseau Progress M-66 s'approche du module Pirsavec sa tige déployée. Ils ont également supprimé l'un des quatre leviers, et donné un degré de liberté supplémentaire aux roulettes qui sont au bout, et qui sont en contact avec le cône. Pour que les opérations d'amarrage soient autorisées par l'ABU, un certain nombre de paramètres doivent rester dans une plage donnée. Ces différents critères sont rassemblés dans le tableau 2.1.1.
2.2. La tête de la tigeElle est constituée de plusieurs capteurs, qui permettent de générer des ordres logiques utilisés par la procédure d'amarrage automatique. Les quatre capteurs en forme de pétales, appelés DK1, sont les capteurs de contact. Ce sont les premiers à détecter le contact physique entre la tige et le cône. Si les paramètres d'approche sont dans les normes autorisées, ils envoient le signal CONTACT. 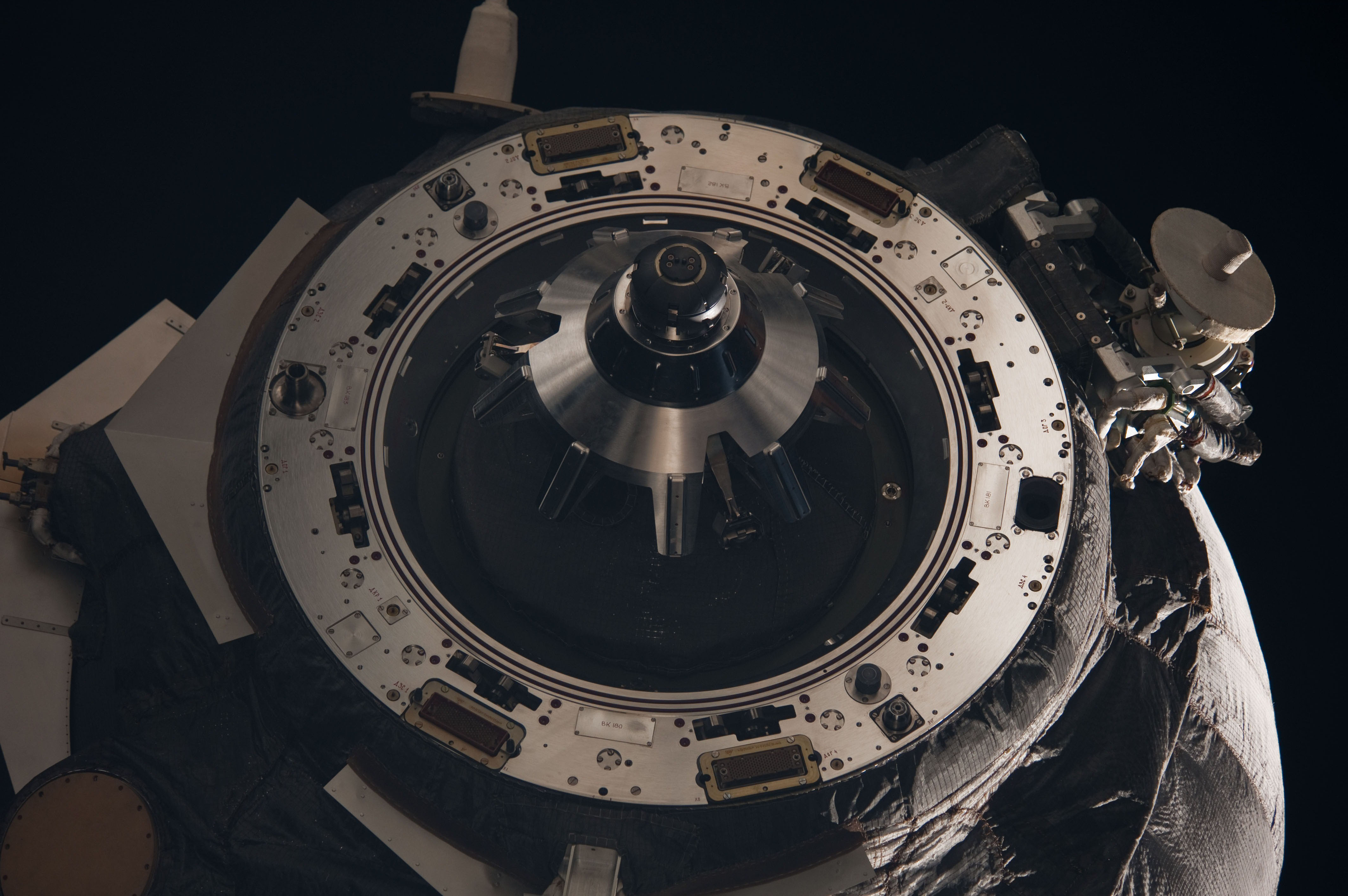 Fig.
2.2.1 : Vue de la tête de la tige
de Progress M-09M, Les deux têtons au bout de la tête de la tige sont les capteurs DK2. Le signal qu'ils émettent dépend de la validation ou non des critères d'amarrage (tableau 2.1.1). Si les critères sont conformes, les DK2 émettent le signal ACCROCHAGE quand ils touchent le cône d'amarrage. En revanche, si les critères ne sont pas conformes, ils émettent le signal ÉCHEC. La tête de la tige comporte également deux capteurs appelés DZG, situés sur le côté. Ils détectent le contact quand la tige s'enfonce dans le fond du cône, et ils envoient le signal CAPTURE. Outre ces trois types de capteurs, on trouve aussi sur la tête de la tige quatre verrous. On les voit sur la figure 2.2.1, et leur fonctionnement est expliqué sur le schéma de la figure 2.2.2. Une fois qu'ils ont pénétrés dans le fond du cône, ils passent devant des butées. Comme ils sont retenus par des ressorts, ils peuvent entrer, mais ne peuvent pas ressortir. 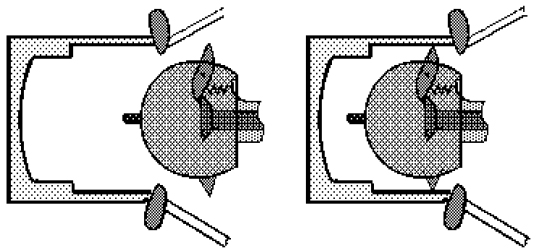 Fig.
2.2.2 : Schéma de principe du
fonctionnement des verrous. Ce blocage de la tige au fond du cône est appelé le premier lien mécanique. Au fond du cône, il y a aussi des encoches trapézoïdales qui empêchent la tige de tourner. Un moteur électrique appelé PZ (Привод Защелок) permet ensuite de rétracter les verrous, ce qui permet à la tête de la tige de ressortir. Si le PZ ne fonctionne pas, les butées du cône peuvent elles aussi être rétractées, ce qui aura le même effet. Si cette solution ne fonctionne pas non plus, une procédure ultime consisterait à actionner quatre boulons explosifs qui sépareraient la tête de la tige. Celle-ci resterait alors coincée dans le fond du cône, rendant la pièce d'amarrage passive (PSA) définitivement inutilisable.  Fig.
2.2.3 : La première version du SSVP, avant les modifications post-Soyouz-10. 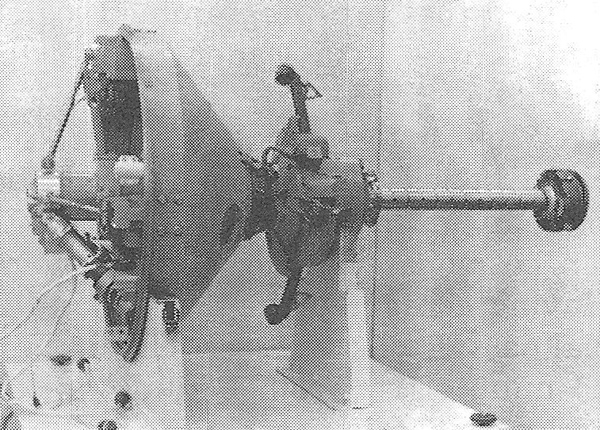 Fig.
2.2.4 : Un SSVP première version, avant les modifications post-Soyouz-10. 3. Les anneauxLes anneaux sont la principale amélioration par rapport au système d'amarrage de première génération. Ce dispositif, appelé , constitue le second lien mécanique entre le vaisseau et la station. Ils ont un diamètre de 800mm. 3.1. Le système de verrouillageUne fois que le premier lien mécanique a été établi par le mécanisme tige-cône, les anneaux du vaisseau et de la station, qui sont rigoureusement identiques, se retrouvent en vis-à-vis. 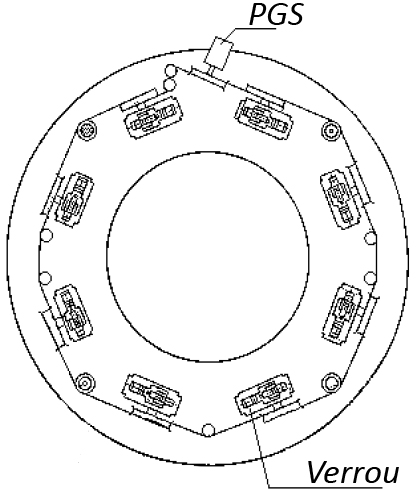 Fig.
3.1.1 : Schéma du MGS. Quand l'alignement a été correctement effectué, le système de verrouillage MGS (Механизм герметизации стыка) est actionné. Il est constitué de huit paires de verrous : l'un actif, l'autre passif. Comme les anneaux du vaisseau et de la station sont identiques, il y a symétrie. Une fois que les deux anneaux sont en contact, les huit verrous actifs du vaisseau sont actionnés et se resserrent sur les verrous passifs de la station. Le second lien mécanique est alors considéré comme effectif. Les huit verrous actifs de la station sont également refermés afin d'assurer une rigidité maximale. 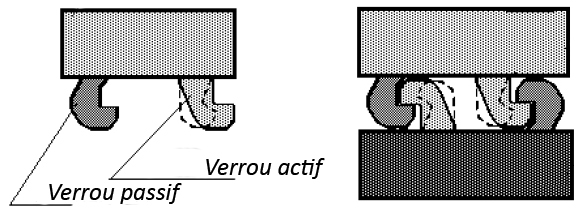
Fig. 3.1.2 : Schéma d'un mécanisme de verrouillage. Les verrous sont manœuvrés grâce à un moteur électrique appelé PGS (Привод герметизации стыка). Une fois que le second lien mécanique est réalisé, un moteur appelé PGK (Привод Герметизации Крышки) compresse les anneaux l'un contre l'autre, afin d'assurer une étanchéité maximale. Chaque verrou actif et passif est équipé d'un boulon pyrotechnique qui permettrait de rompre la liaison en bloquant les verrous en position ouverte. Utiliser ce système reviendrait à condamner la pièce d'amarrage passive. 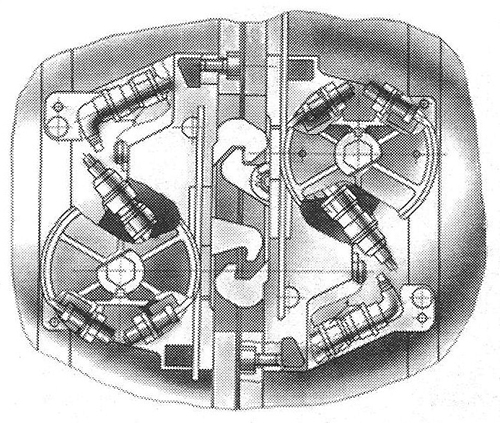
Fig. 3.1.3 : Schéma d'un mécanisme de verrouillage. 3.2. Les capteursPlusieurs capteurs, disposés tout autour des anneaux, permettent de rendre compte du contact entre les deux anneaux. Tout d'abord, quand l'anneau du vaisseau est à moins de 3,5mm de celui de la station, quatre capteurs DZS (Датчик Закрытия Стыка) envoient le signal INTERFACE FERMÉE. Ensuite, quand les anneaux ne sont plus qu'à 1mm l'un de l'autre, quatre capteurs DOG (Датчик Обеспечения Герметичности) envoient le signal INTERFACE PRESSURISÉE. 
Fig. 3.2.1 : Vue de la pièce d'amarrage de Progress M-09M, Il y a également deux capteurs DKR (Датчик Контроля Расстыковки) de contrôle de la séparation. Quand le vaisseau se désamarre, ce sont eux qui envoient le signal qui confirme que la séparation a bien eu lieu. Pour finir, les anneaux sont équipés de quatre connecteurs ChRS qui permettent d'établir le lien électrique entre le vaisseau et la station. 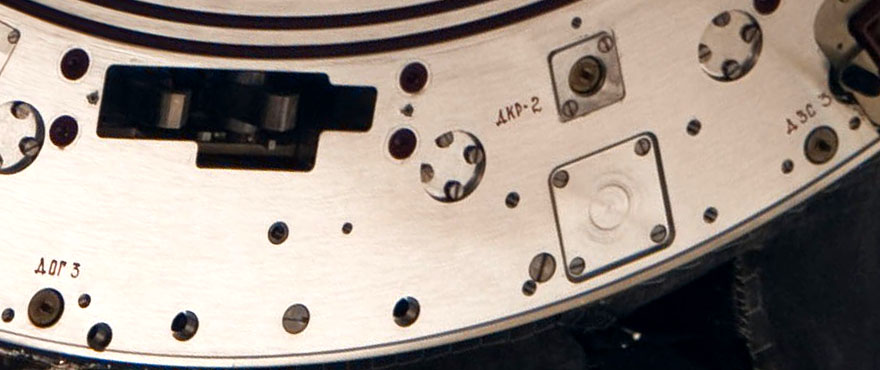
Fig. 3.2.2 : Gros plan sur la pièce d'amarrage de Progress M-09M. 4. Opérations4.1. Déroulement de l'amarrageLe système de rendez-vous automatique Kours (Igla sur les anciennes versions de Soyouz) amène le vaisseau à proximité de la pièce d'amarrage de la station orbitale. Les moteurs directionnels DPO font avancer le vaisseau jusqu'à ce que la tige rentre dans le cône. Le premier lien mécanique est alors établi. La tige est rétractée et le vaisseau est aligné avec la station. Quand les anneaux sont en contact, les verrous sont refermés. C'est le second lien mécanique. Ensuite, les anneaux sont compressés l'un contre l'autre, et l'interface ainsi formée est étanche. 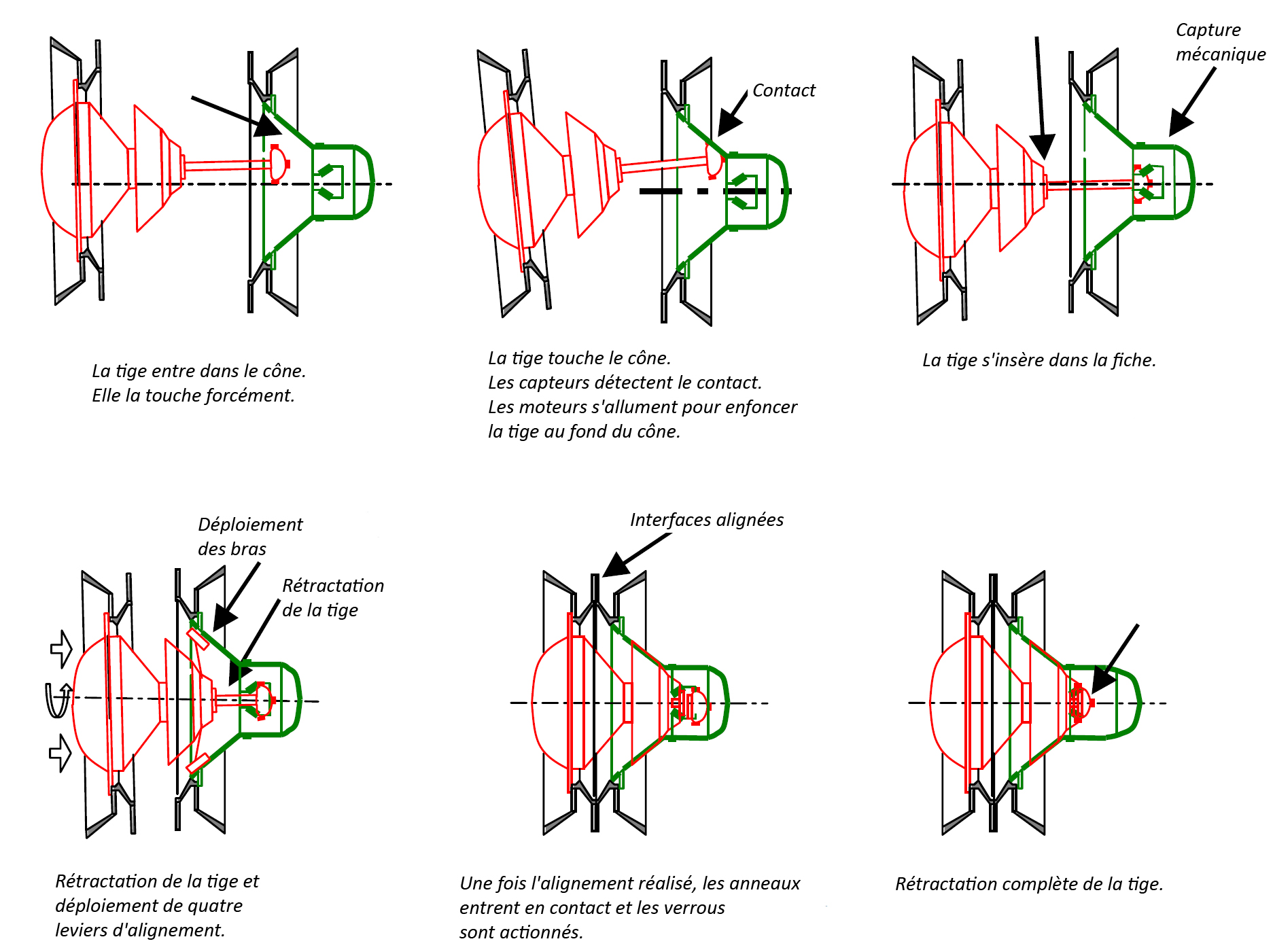
Fig. 4.1.1 : Séquence d'amarrage du SSVP. Le premier lien mécanique est alors rompu, par rétractation des verrous de la tête de la tige (moteur PZ), et la tige est rétractée (moteur PSM). L'interface est alors pressurisée, et les cosmonautes utilisent le système SKGS pour contrôler la pression. Les écoutilles peuvent maintenant être ouvertes côté Soyouz et côté station. 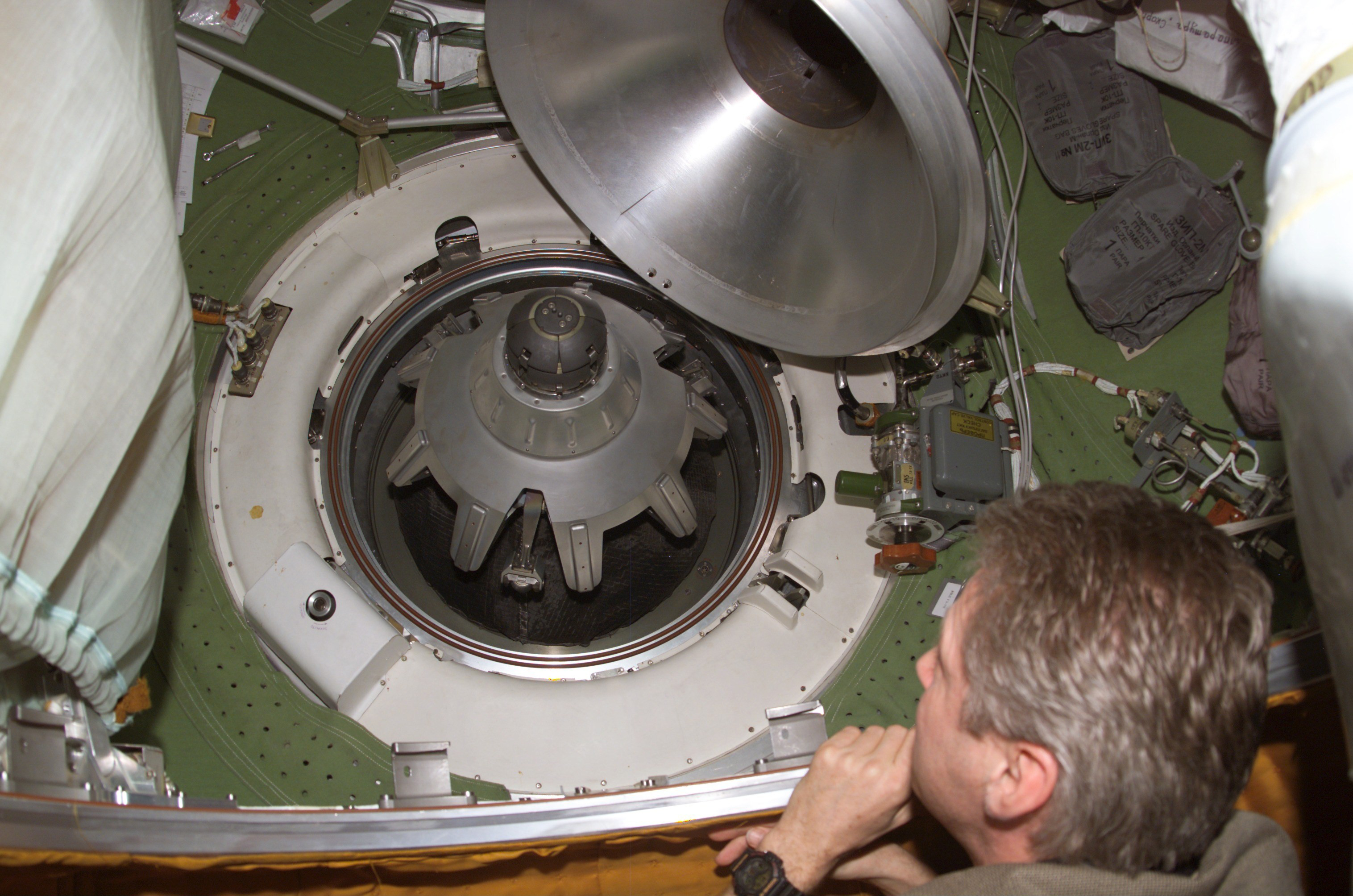
Fig. 4.1.2 : L'écoutille du module Zaria est ouverte, L'ouverture (et la fermeture) est réalisée à l'aide d'une clef spéciale, visible sur la vidéo 1. Une fois les écoutilles ouvertes, les cosmonautes mettent en place un dispositif de crampons appelé BZV. Celui-ci permet de rigidifier encore davantage la liaison, et peut-être démonté très rapidement en cas de besoin. 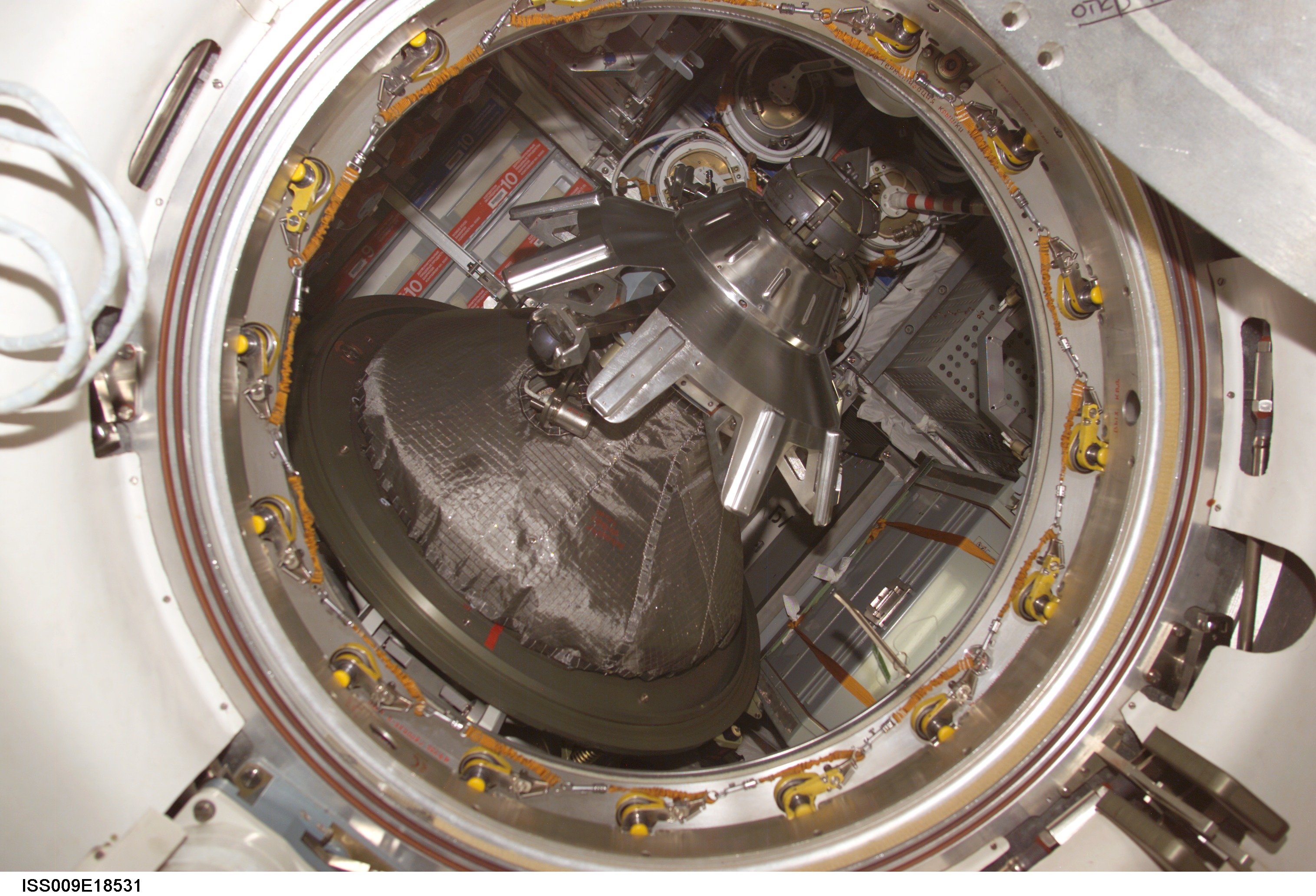
Fig. 4.1.3 : Vue des crampons qui rigidifient la liaison entre Progress M-50 et Zvezda. On notera que, en 1997, la séparation du vaisseau Progress M-35 avait échoué car les cosmonautes avaient oublié de retirer l'un des crampons. 4.2. Déroulement de la séparationPour séparer le Soyouz de la station, il faut avant tout refermer les deux écoutilles et dépressuriser l'interface. Comme le premier lien mécanique a été rompu juste après l'amarrage, il n'y a plus qu'à rompre le second lien pour libérer le vaisseau. Les verrous de la station (PSA) sont ouverts en premier, et c'est donc l'ouverture des verrous du Soyouz qui libère celui-ci. Des ressorts (Fig. 3.2.1) permettent de l'éloigner en douceur (de 0,12 à 0,15m/s). Vidéo 4.2.1 : KONDRATIEV referme l'écoutille de Poïsk avant la séparation de Soyouz TMA-M. Les écoutilles sont motorisées, et peuvent donc être fermées à distance par le Centre de Contrôle des Vols (TsUP). Si l'équipage du Soyouz part en laissant une station inhabitée, il peut fermer l'écoutille de la station depuis le vaisseau. Mais en temps normal, chaque équipage (Soyouz et station) ferme son écoutille manuellement. 5. Contrôle-commande5.1. Commande automatiqueLors d'un amarrage nominal, c'est le boîtier ABU qui gère les opérations de manière automatique. Il se sert des informations des différents capteurs (tête de la tige et anneaux) pour commander les actionneurs. 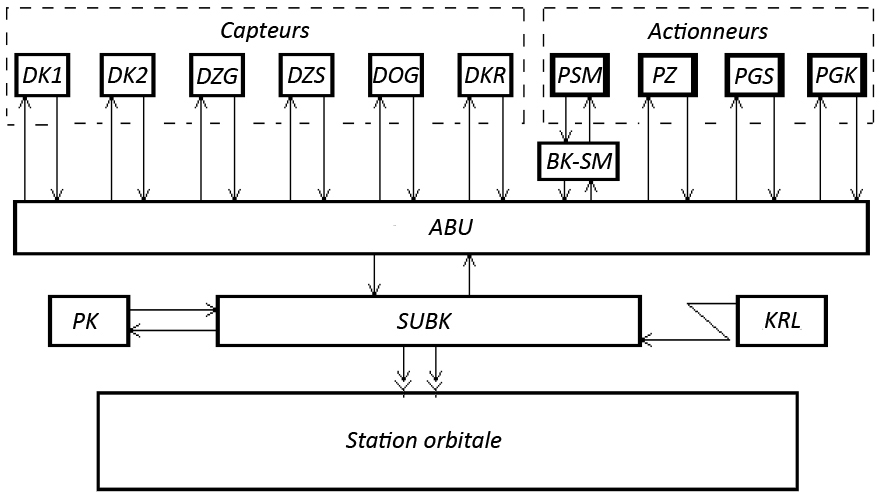
Fig. 5.1.1 : Schéma de principe du contrôle-commande du SSVP. Comme on le voit sur le figure 5.1.1, il y a six types de capteurs qui rentrent dans la chaîne. Il s'agit des trois types de capteurs de la tête de la tige (DK1, DK2 et DZG) ainsi que des trois types de capteurs de l'anneau (DZS, DOG et DKR). Ces données permettent à l'ABU de commander le moteur de la tige (PSM), le moteur des verrous de la tige (PZ), le moteur des verrous des anneaux (PGS) et le moteur d'étanchéification (PGK). L'ABU agit directement sous la commande du système de contrôle du vaisseau Soyouz, le SUBK. Celui-ci est en interface avec le système de contrôle de la station spatiale. 5.2. Commande automatique de secoursEn cas d'échec de l'amarrage automatique, le programme n°12 du système de synchronisation APVU du SUBK peut prendre la main et commander lui-même les opérations. Dans ce cas, il gère également les moteurs DPO-B afin de contrôler les mouvements du vaisseau. 5.3. Commande manuelleSi, pour une raison ou une autre, l'ABU est indisponible, les cosmonautes peuvent prendre la main. Ils disposent des principales commandes sur le tableau de bord (PK) et des informations leur sont envoyées sur le panneau TSE2 (version Soyouz TM). 5.4. Commande à distanceLe Centre de Contrôle des Vols (TsUP) de Koroliov, dans la Région de Moscou, a lui aussi la possibilité de prendre la main par radio (liaison KRL). 6. Schémas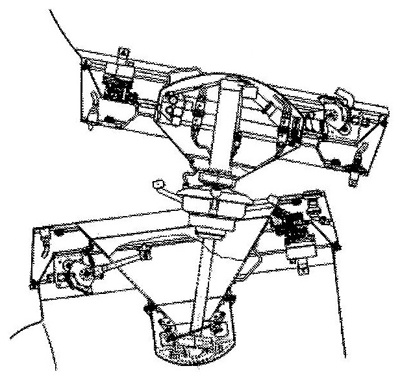 Fig. 6.1 : Schéma du premier SSVP, utilisé uniquement sur Soyouz-10 en 1971. 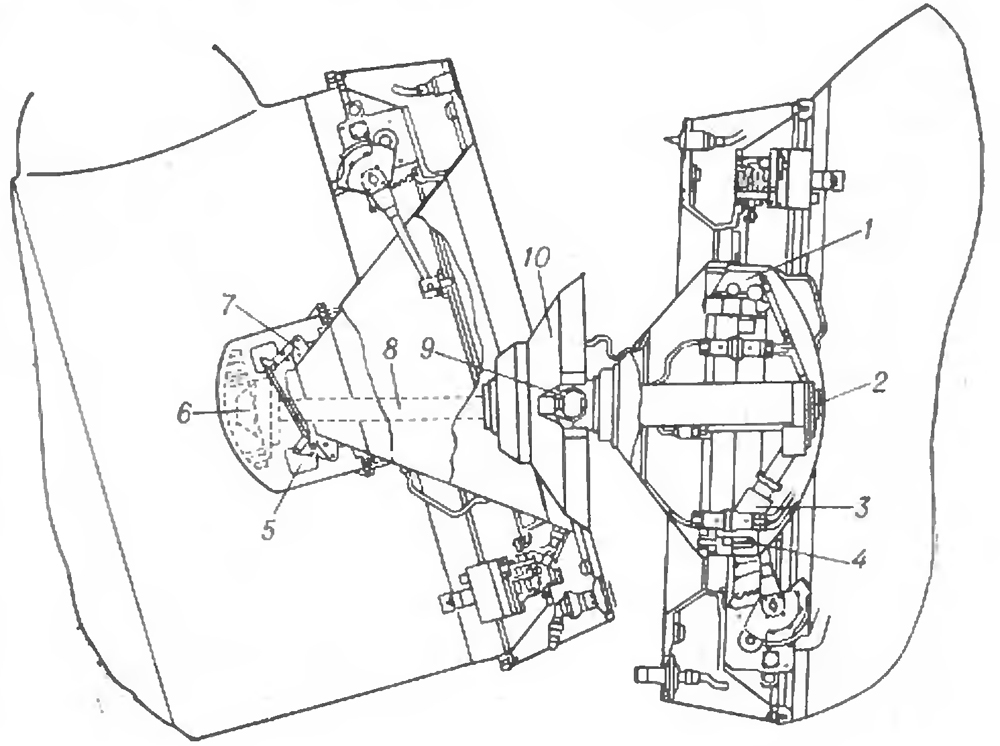
Fig. 6.2 : Schéma du SSVP. 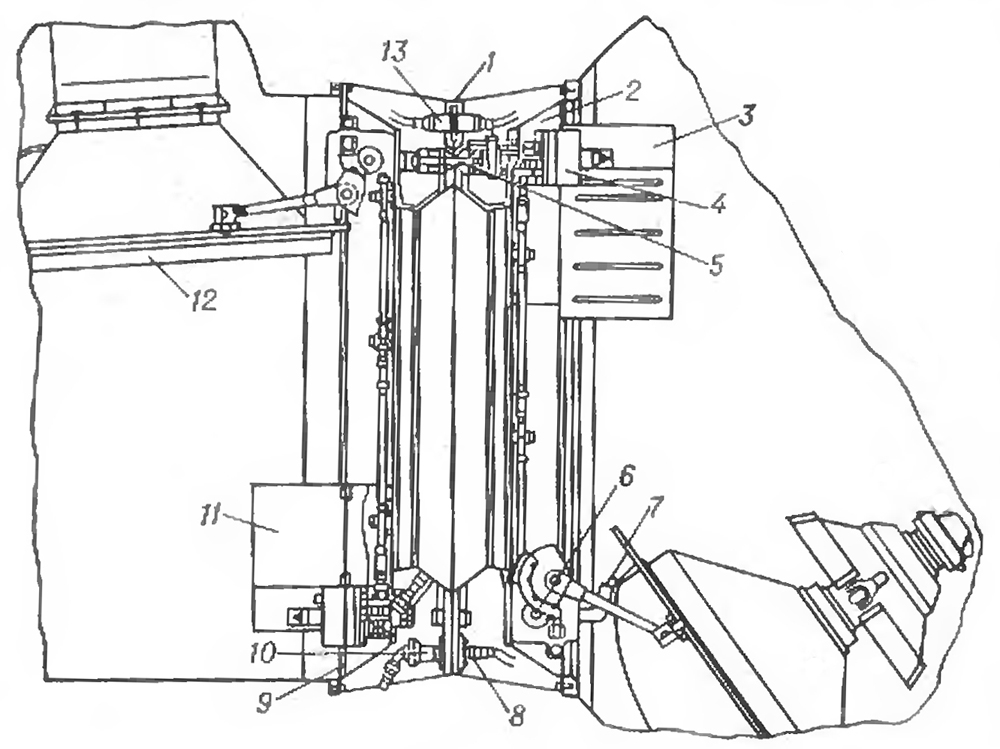
Fig. 6.3 : Schéma du SSVP après ouverture du tunnel. Dernière mise à jour : 15 avril 2020 |
|