SSVP | Le premier système d'amarrage1. GénéralitésLe premier système d'amarrage soviétique a volé à quinze reprises sur les vaisseaux Soyouz de première génération 7K-OK (11F615). Il a permis de réaliser le premier amarrage entre deux vaisseaux automatiques (Cosmos 186 et Cosmos 188), ainsi que le premier amarrage entre deux vaisseaux habités (Soyouz-4 et Soyouz-5). Le développement de ce système a été réalisé au département n°333 de l'OKB-1 sous la direction de Vladimir SYROMIATNIKOV. 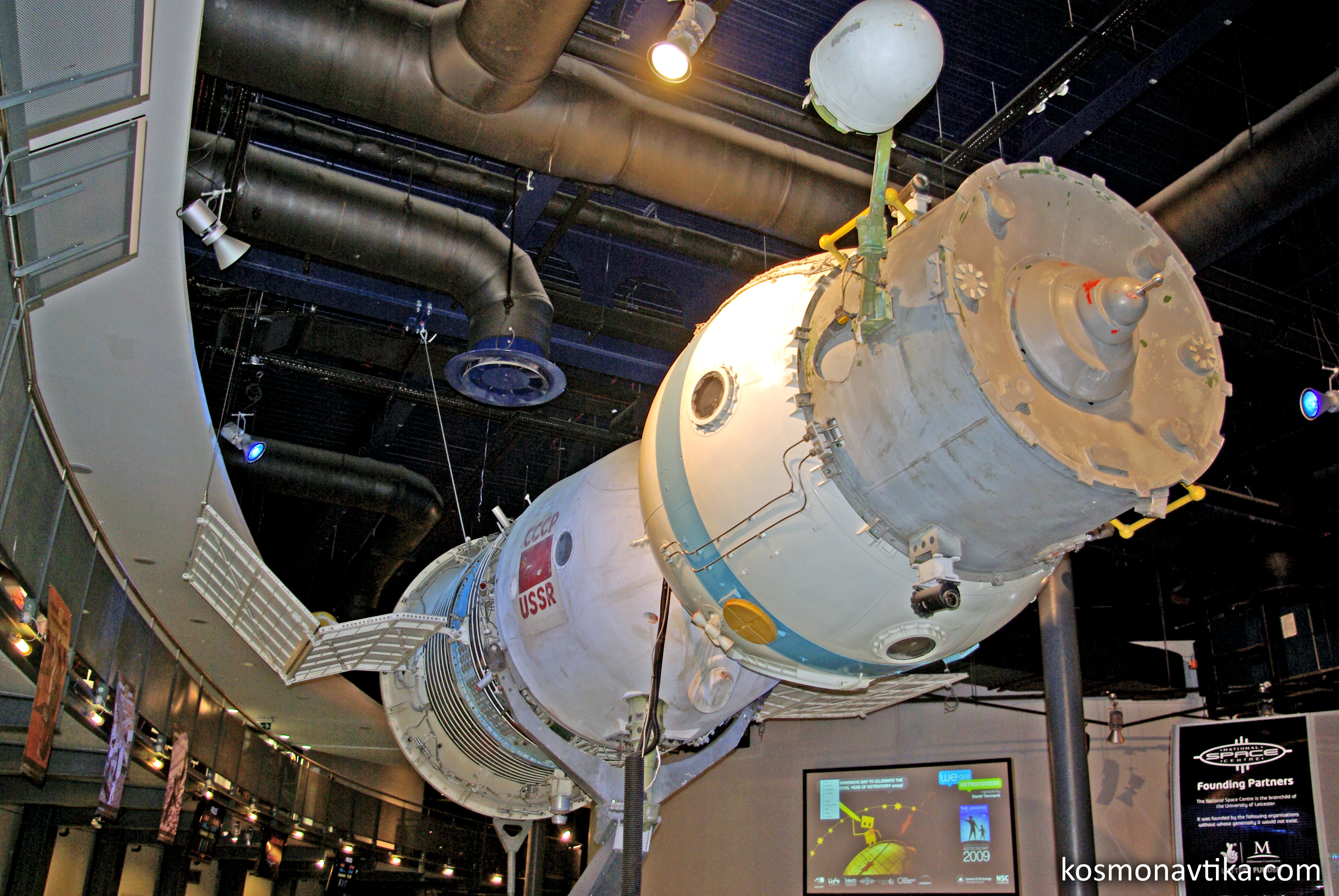
Fig. 1 : Reproduction d'un 7K-OK avec son système d'amarrage. Le système est constitué de deux parties : l'une active et l'autre passive. La partie active, montée sur le premier vaisseau Soyouz, comporte une tige métallique qui vient s'insérer dans le cône de la partie passive, montée quant à elle sur un second Soyouz. 
Fig. 2 : Schéma du système d'amarrage du Soyouz 7K-OK. Dans les deux cas, le système d'amarrage est situé à l'avant du vaisseau, sur le Compartiment de Vie (BO). La tige est amenée dans le cône soit de manière automatique, à l'aide du système de rendez-vous Igla, soit de manière manuelle par le commandant de bord. Ce premier système ne permet que de relier mécaniquement deux vaisseaux Soyouz entre eux, et ne permet pas à l'équipage de passer d'un vaisseau à l'autre. La tige de la partie active est déployable. Au fond du cône de la partie passive, elle vient s'insérer dans une fiche qui permet de la maintenir en position. 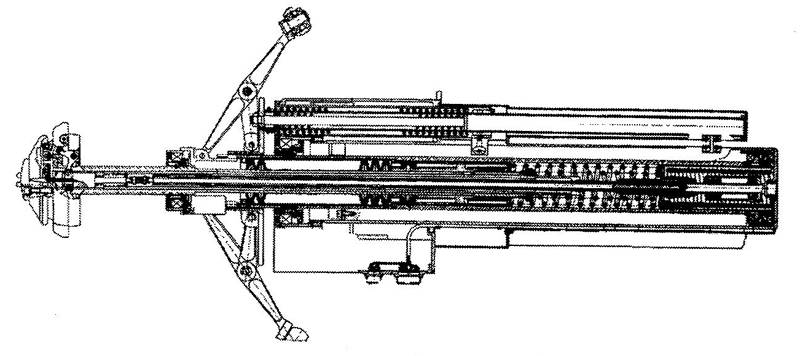 Fig. 3 : Schéma du mécanisme
d'amarrage. Le système de rendez-vous automatique Igla se charge d'amener les deux vaisseaux Soyouz (actif et passif) en vis-à-vis. En théorie, l'alignement des vaisseaux est parfait, et les deux parties du système d'amarrage peuvent se verrouiller. Dans la pratique, il y a toujours une incertitude dans l'alignement des vaisseaux. Les variations de positions linéaire et angulaire, ainsi que les six composantes de la vitesse relative, sont appelées les « conditions initiales ». Le système d'amarrage est donc conçu de manière à pouvoir fonctionner tant que ces conditions initiales restent dans une certaine plage de valeurs. 2. Principaux élémentsLors du contact entre les deux vaisseaux, il est très important d'amortir le choc. Deux systèmes permettent de réaliser cette fonction : le frein électromagnétique et la vis à billes. 2.1. La vis à billesLa vis à billes ChVP (Шарико-Винтовой Преобразователи) est certainement l'élément clé du système d'amarrage. C'est elle qui constitue la tige de la partie active : elle permet de transformer un mouvement de rotation en un mouvement de translation, et vice versa. Une vis à bille est semblable à une vis classique, à ceci près que des billes sont intercalées entre la vis et l'écrou, ce qui permet une meilleure réversibilité du mouvement [13]. 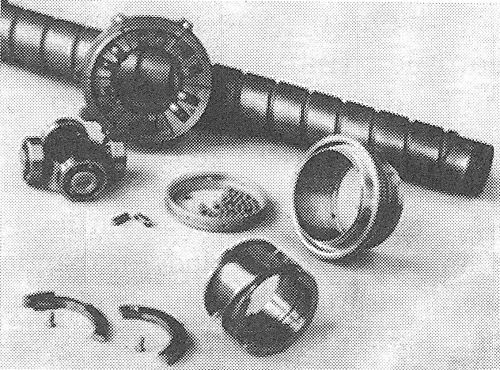
Fig. 4 : La vis à billes. La vis à billes sert à deux moments d'une mission Soyouz : - pour déployer la tige : un moteur
électrique donne un mouvement de rotation, qui est converti en translation de la
tige, 2.2. Le frein électromagnétiqueIl participe également à l'amortissement lors du contact entre le vaisseau actif et le vaisseau passif. A l'origine, l'EMT (Электромагнитный Тормоз) était constitué d'un moteur à aimants permanents avec un rotor en court-circuit. 
Fig. 5 : Le frein électromagnétique. Mais à un stade inconnu du développement, c'est un rotor invisible qui a été préféré, de manière à réduire le temps de réponse du frein. L'EMT fourni un amortissement proportionnel à sa vitesse de rotation. 3. HistoriqueLe tableau 1 donne la liste des quinze vaisseaux Soyouz 7K-OK (11F615) qui ont été équipés de ce système d'amarrage de première génération. 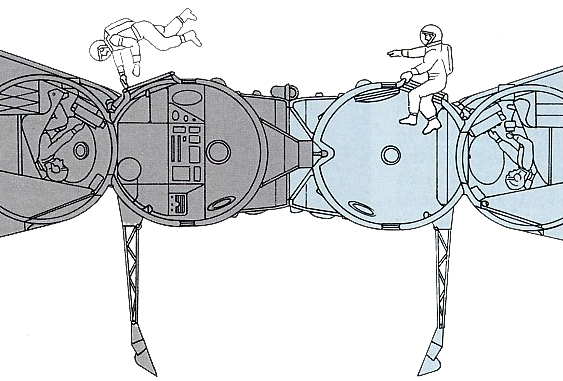
Fig. 6 : Schéma de l'amarrage entre deux Soyouz 7K-OK. En tout, outre les tentatives avortées dues à des échecs lanceur ou à des dysfonctionnements du vaisseau, trois amarrages ont été réussis, et un seul a échoué. Il s'agit de la rencontre entre Soyouz-2 et Soyouz-3, lors de laquelle le cosmonaute Gueorgui BEREGOVOÏ a présenté son vaisseau dans le mauvais sens, rendant l'amarrage impossible.
4. Photos



Fig. 8 : Un système d'amarrage de première génération. 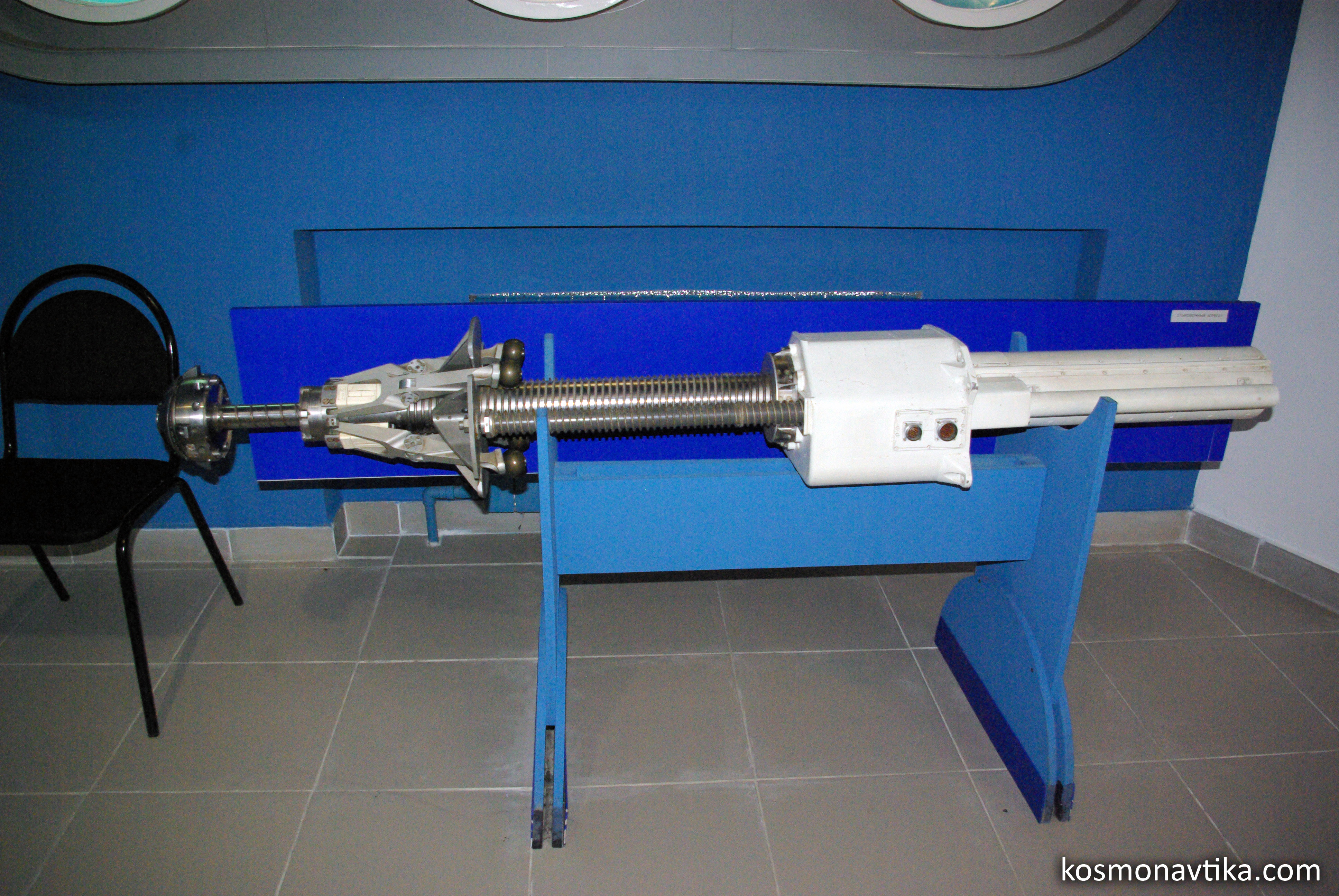 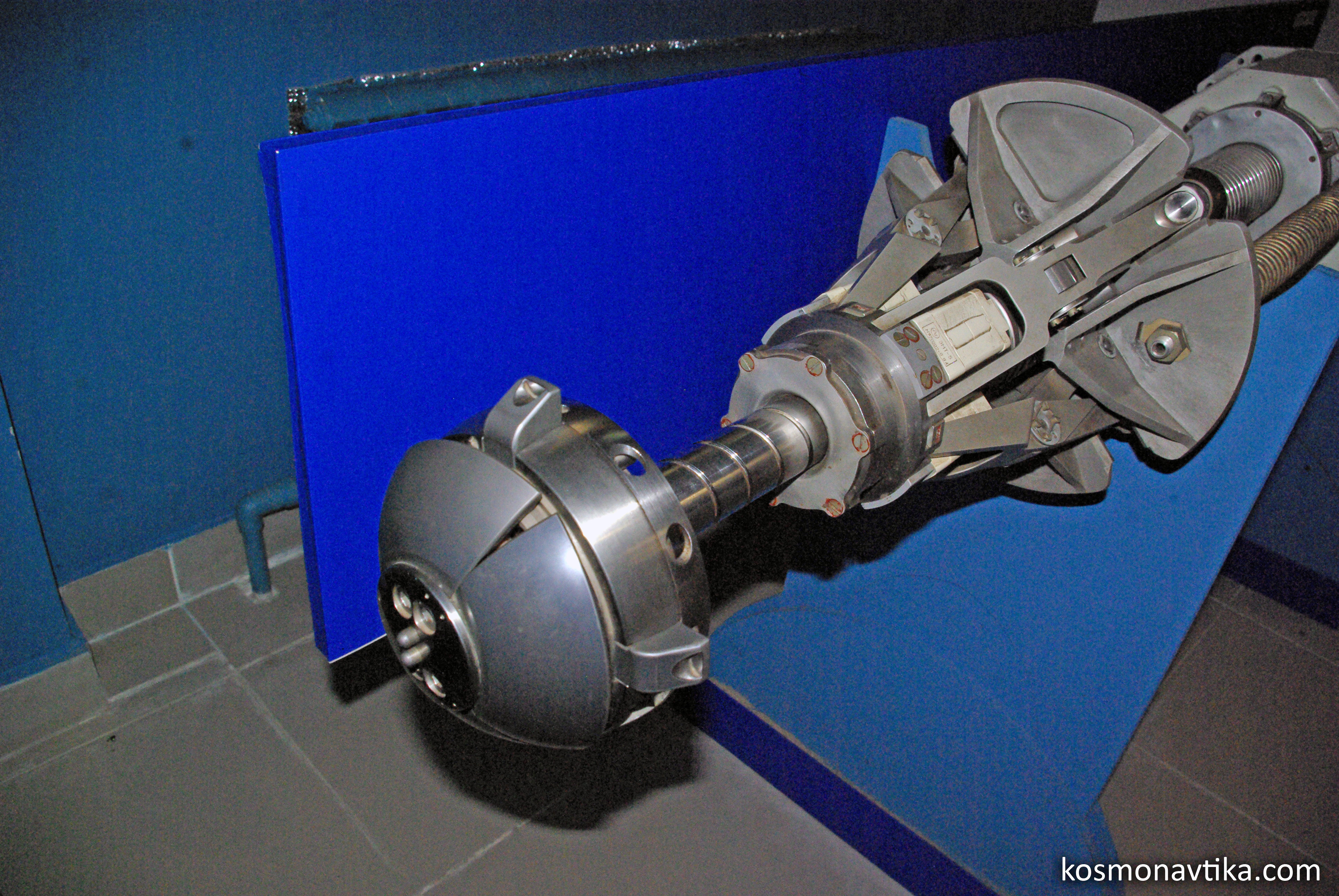
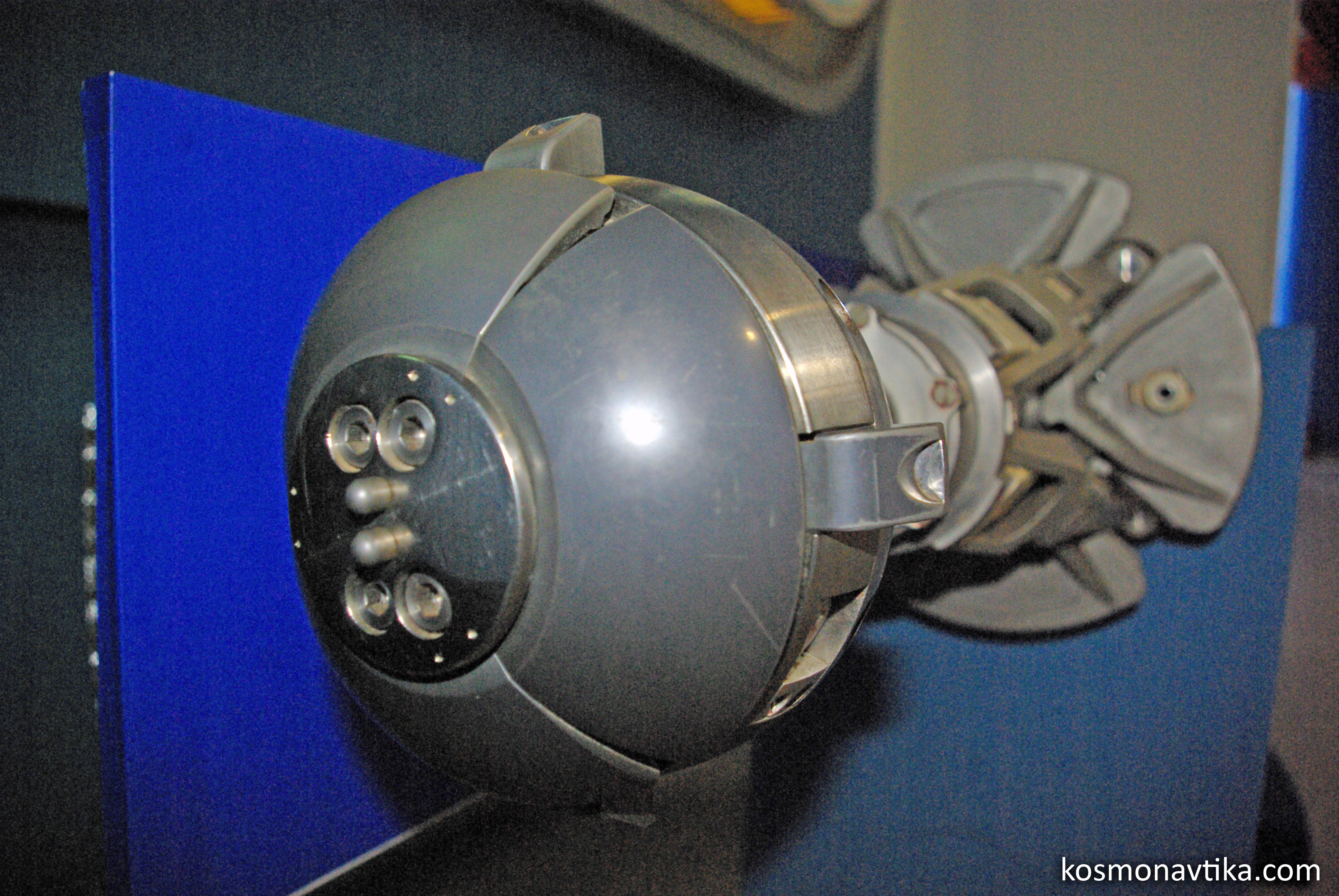
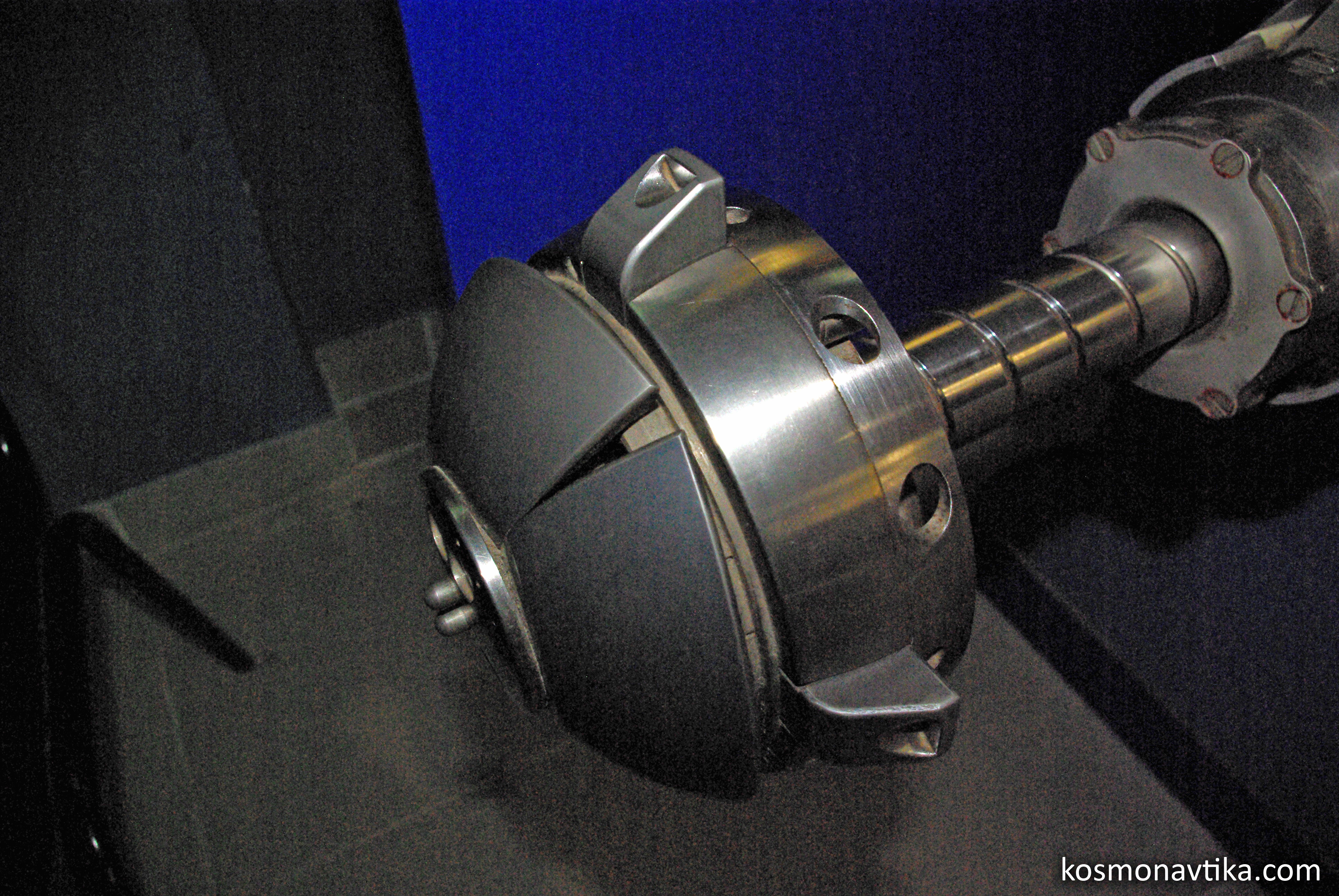
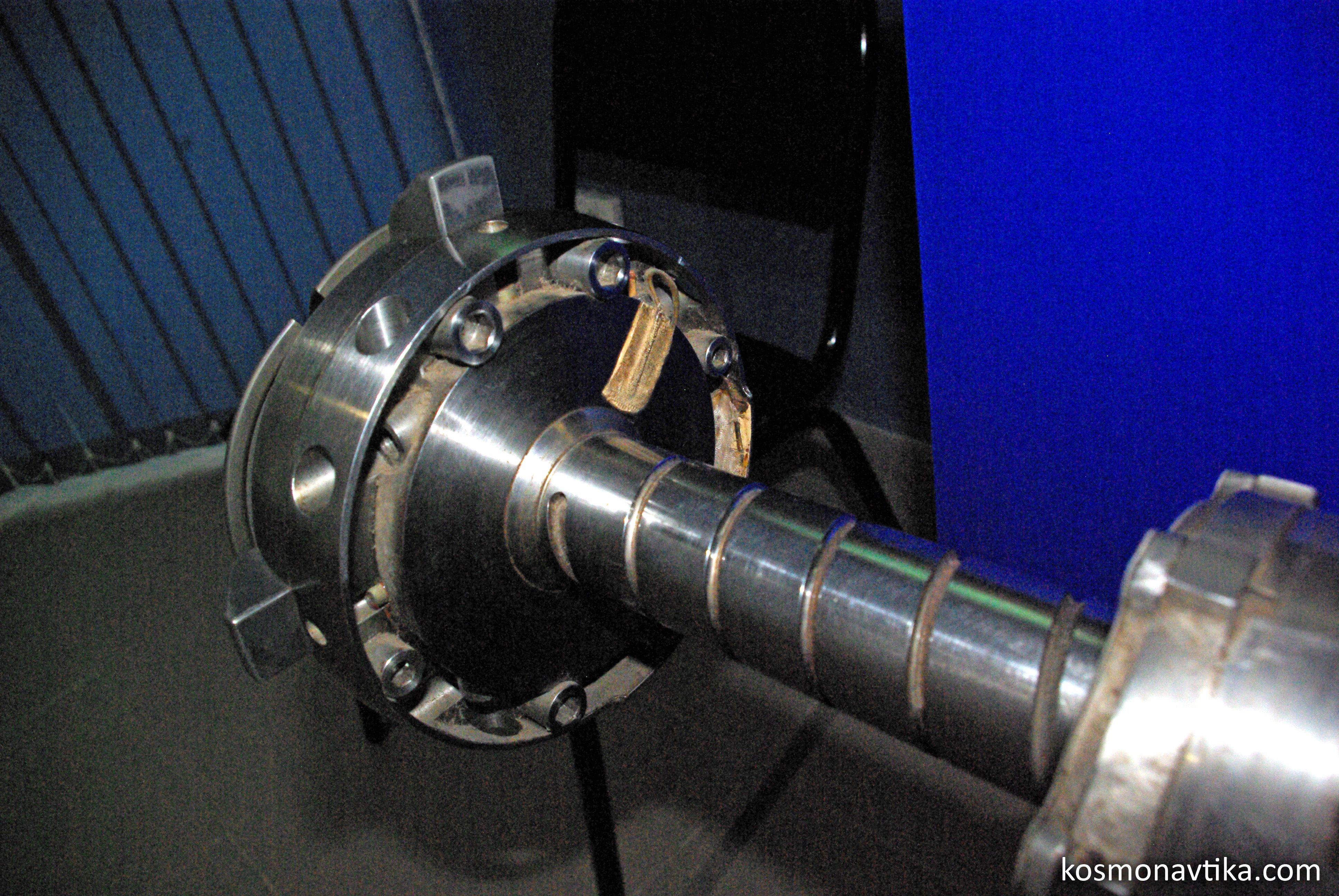
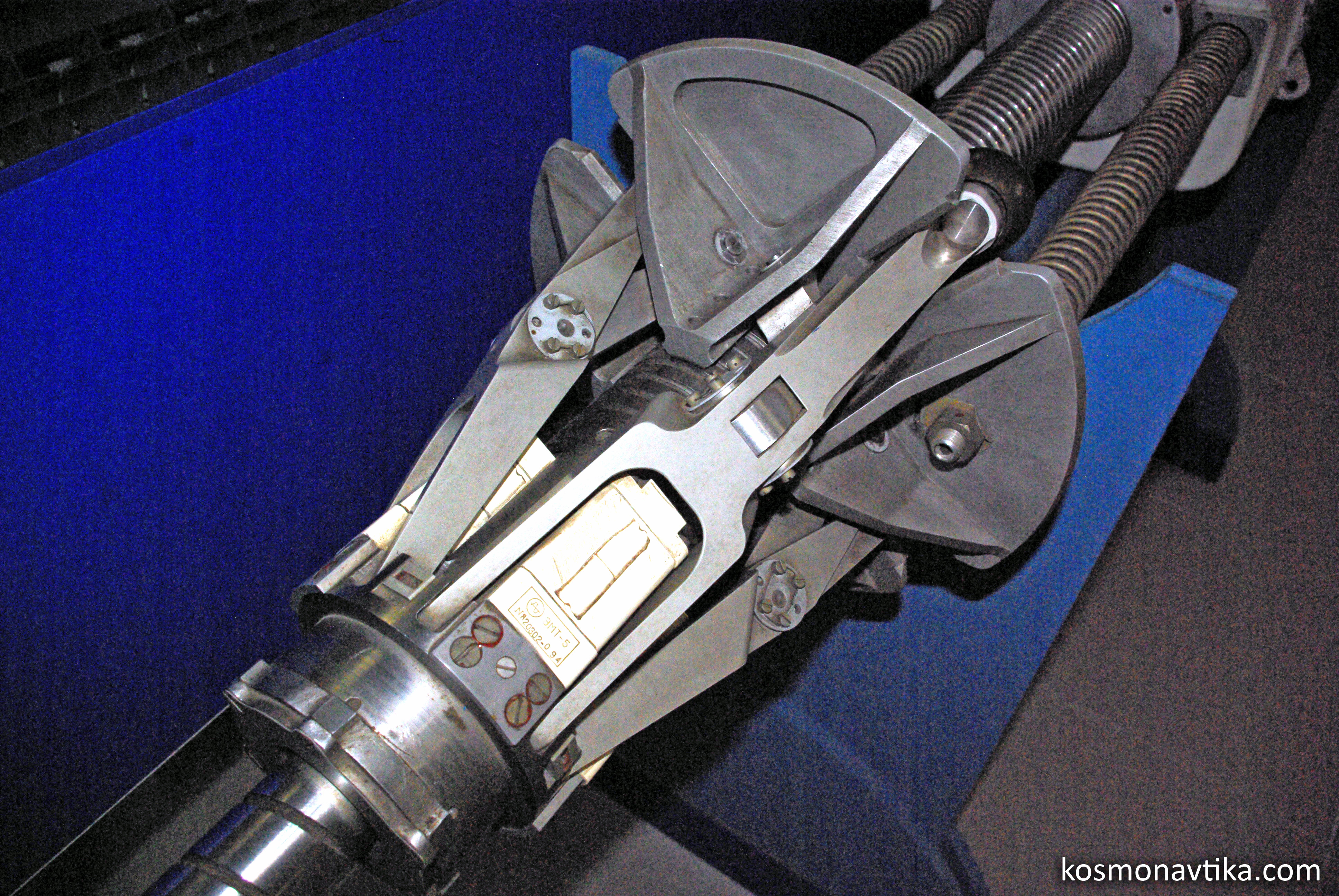
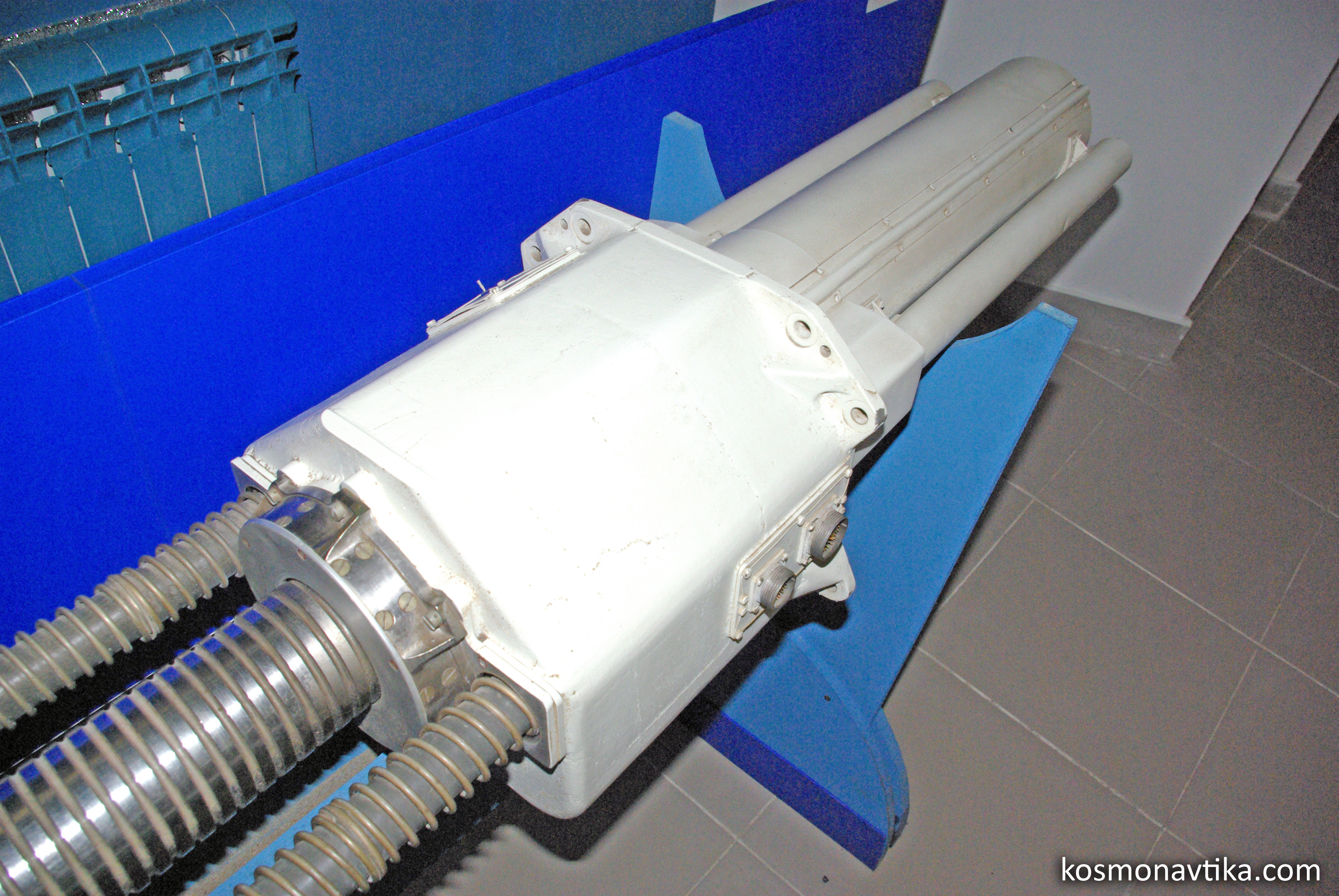
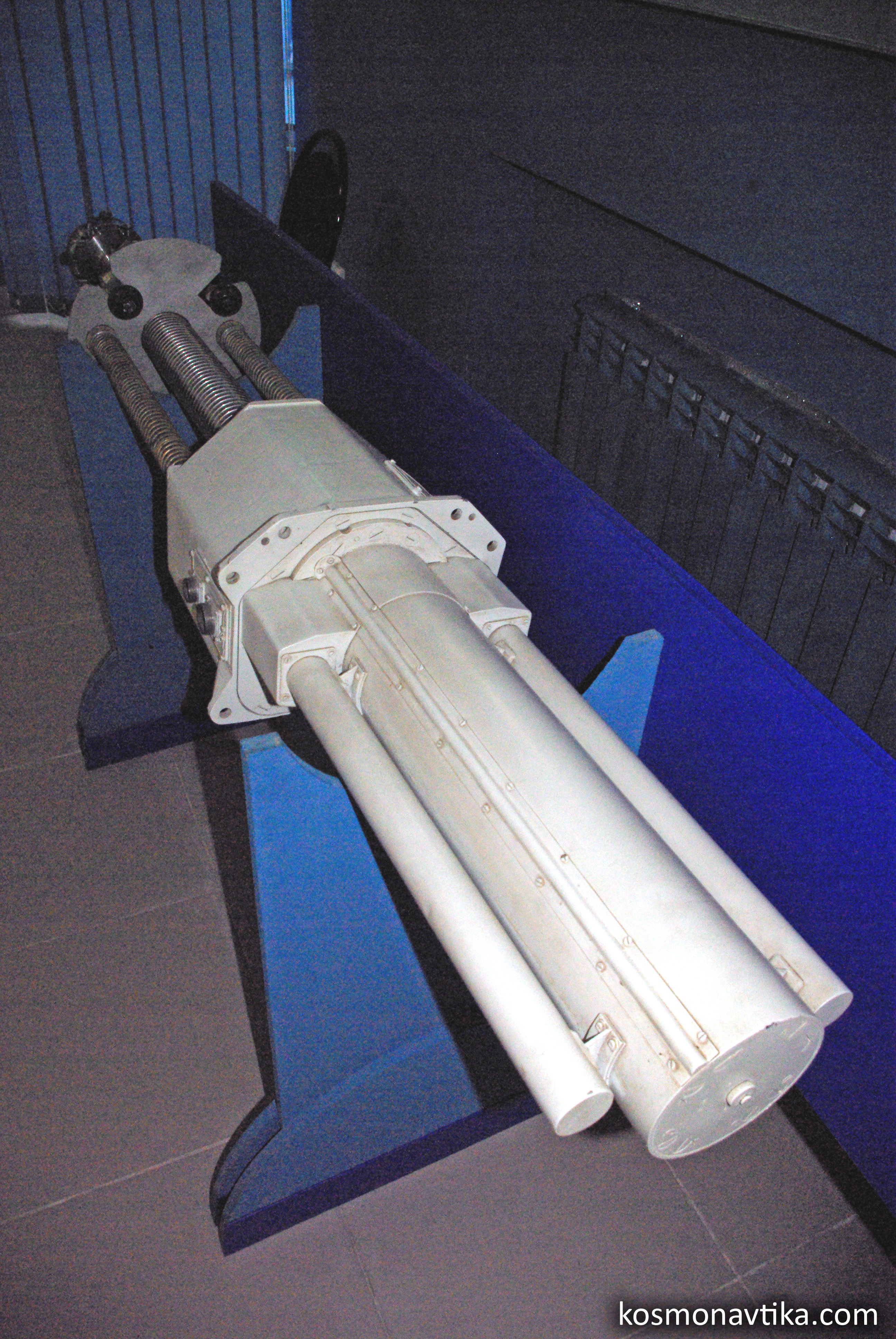
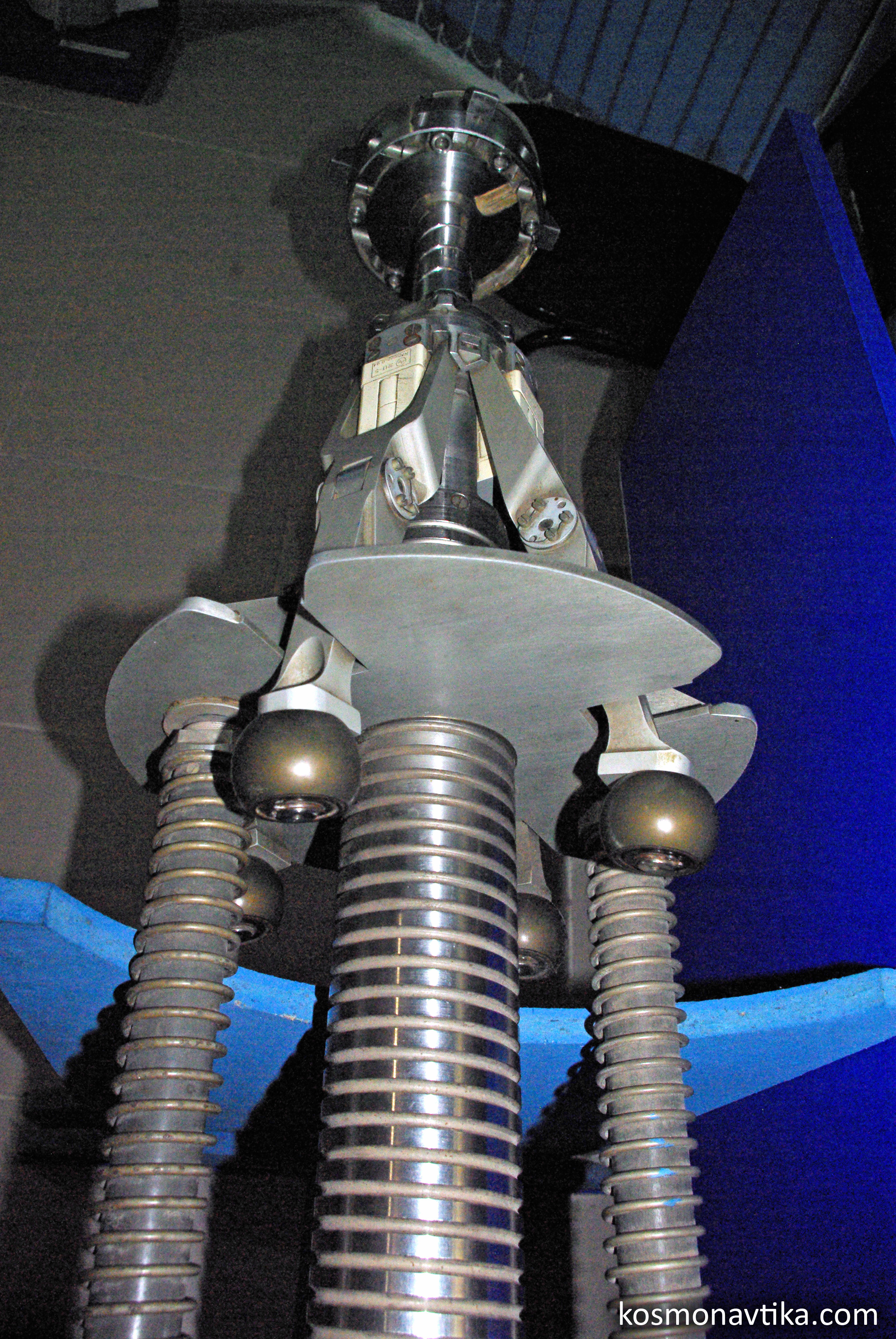
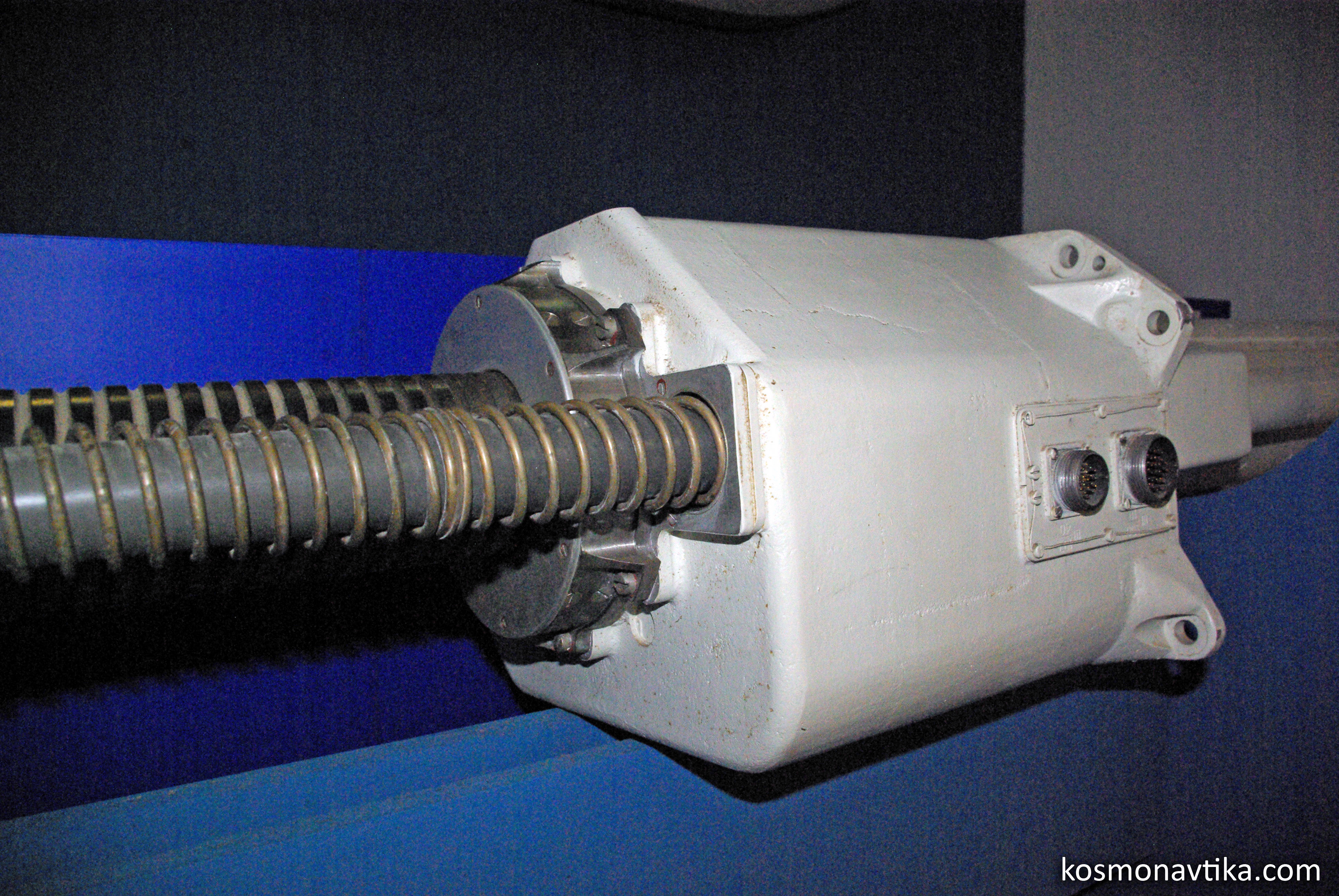
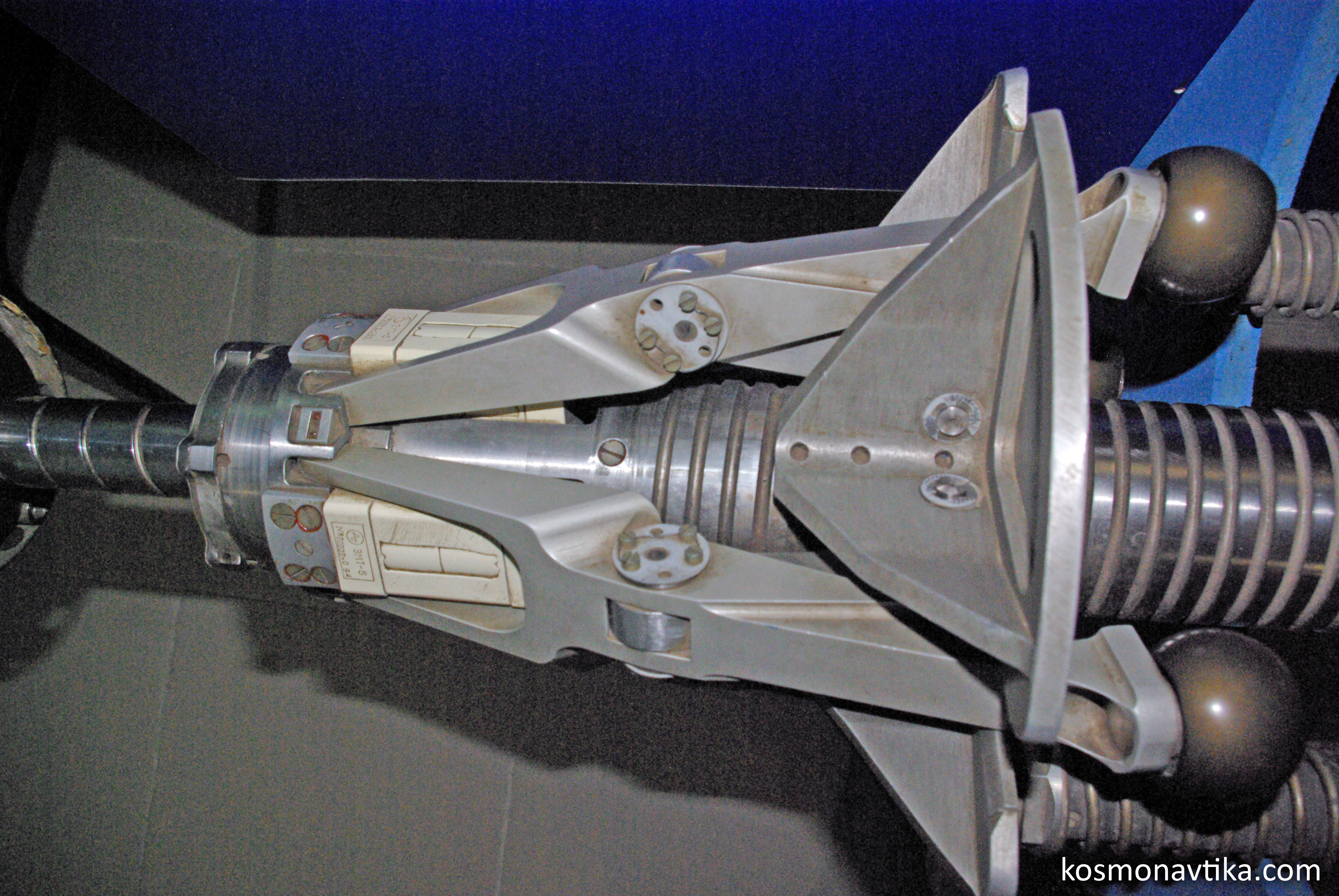
Fig. 9 : Détails d'un système d'amarrage de première génération.
Dernière mise à jour : 21 août 2016 |
|