Elektro-L | La plate-forme Navigator1. GénéralitésLa plate-forme Navigator, également appelée Module de Base des Systèmes de Service BMSS (Базовый модуль служебных систем), abrite l'ensemble des systèmes qui permettent au satellite de s'orienter, de communiquer avec le sol, de recevoir de la puissance électrique et de maintenir son orbite, de réguler sa température. Elle est commune aux satellites Elektro-L et Arktika-M, ainsi qu'aux observatoires spatiaux de la classe Spektr. 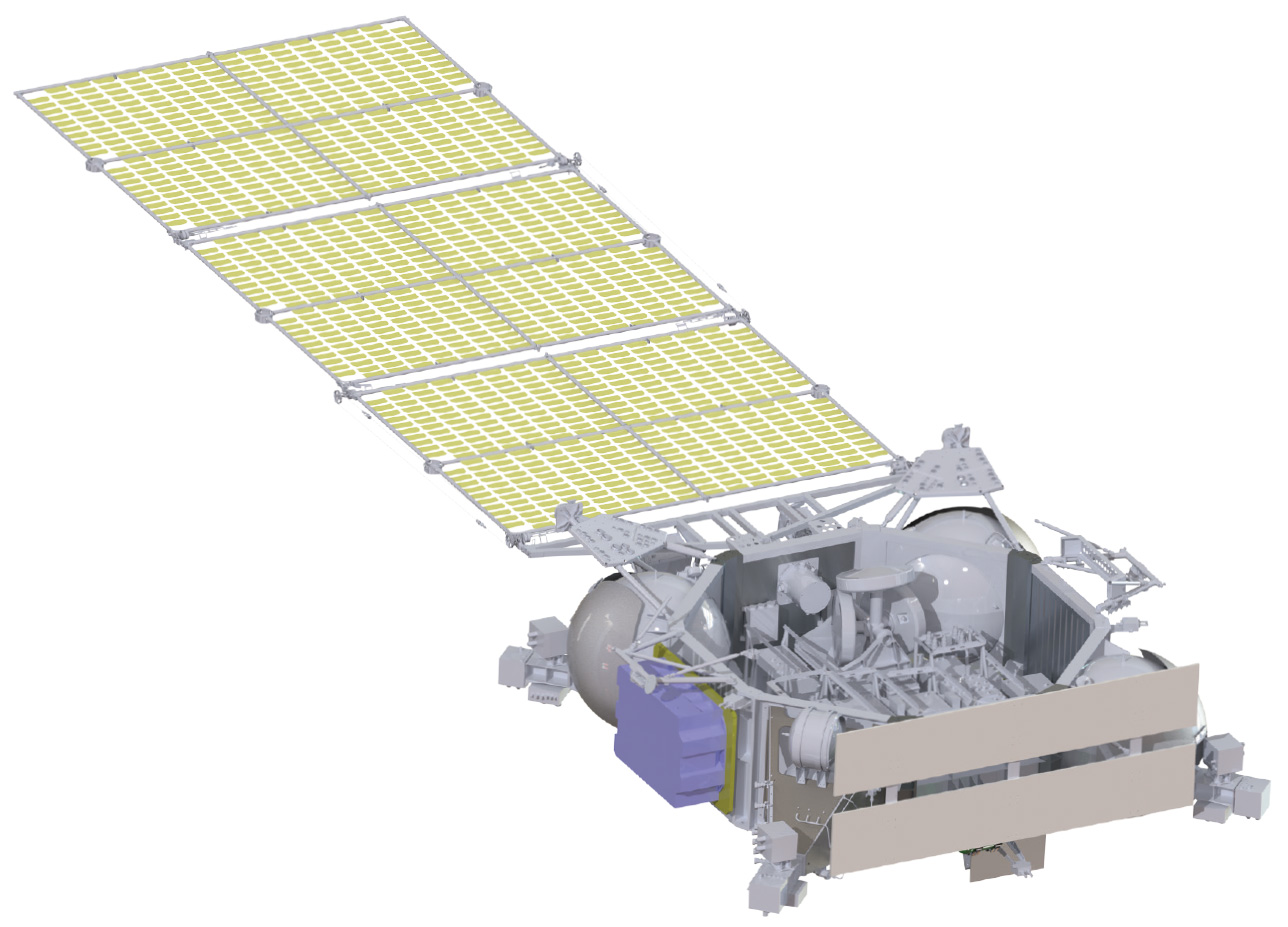
Fig. 1.1 : Schéma de la plate-forme Navigator. 2. Le système de contrôle2.1. GénéralitésLe rôle du Complexe de Contrôle Embarqué BKU (Бортовой Комплекс Управления) est de contrôler l'orientation du satellite Elektro-L, avec une précision de ±1', ainsi que l'ensemble de ses systèmes, y compris la charge utile. Il peut fonctionner de façon autonome ou en réponse aux télécommandes émises depuis le sol [3][11]. 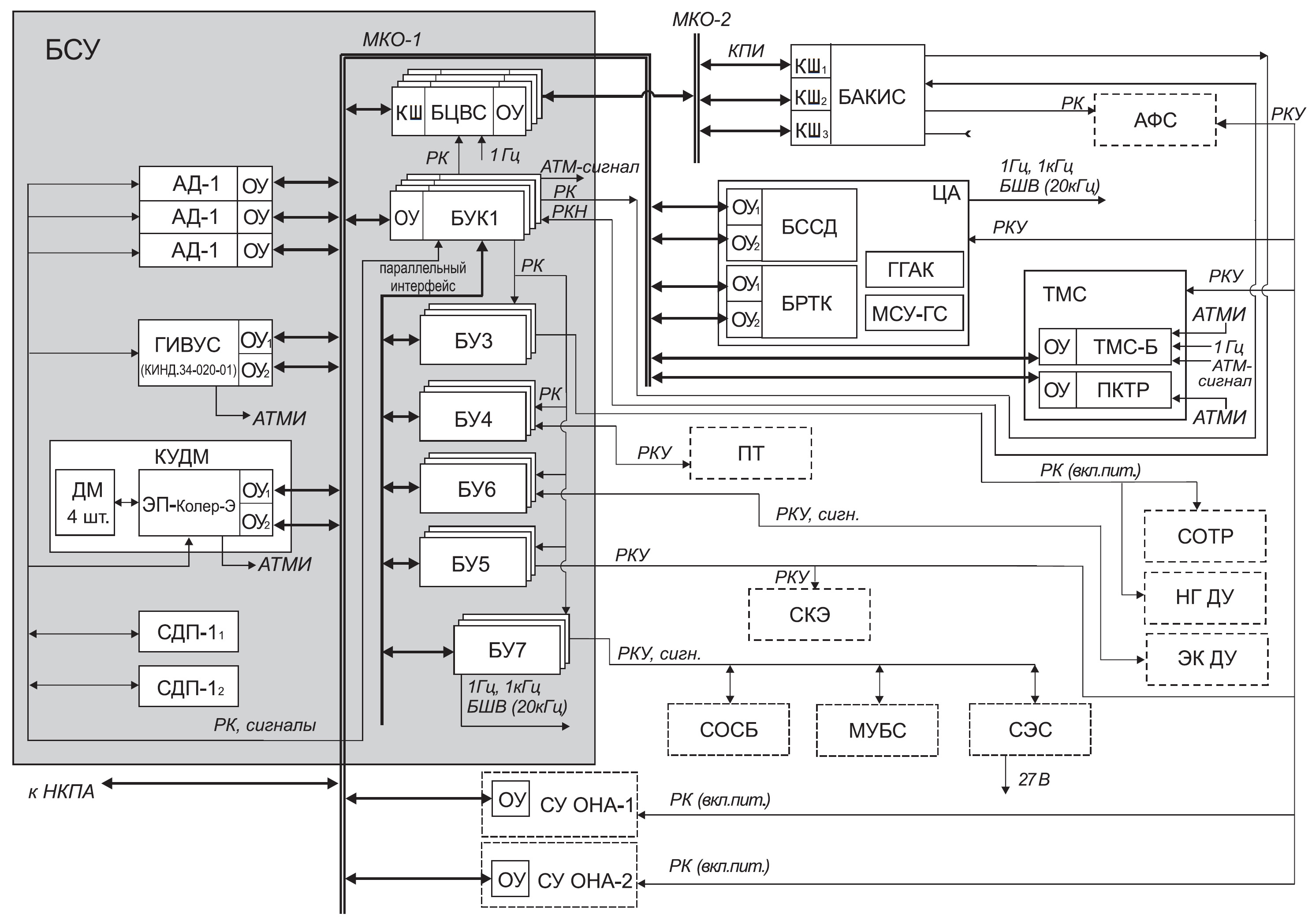
Fig. 2.1.1 : Schéma général du système de contrôle du satellite Elektro-L. C'est l'entreprise MOKB Mars qui s'est vue confier la maîtrise d'œuvre du BKU par NPO Lavotchkine. Il est constitué des éléments décrits dans les paragraphes 2.2 à 2.8. 2.2. L'ordinateur de bordLe système de contrôle du satellite Elektro-L est centré sur un ordinateur de bord (BTsVS) de type Mars-4 fourni par MOKB Mars. Il est constitué de quatre chaînes redondantes, qui comportent chacune deux microprocesseurs i196 [7][8]. 
Fig. 2.2.1 : L'ordinateur Mars-4. Le Mars-4 fonctionne à la fréquence de 20MHz et chaque processeur réalise 2,5 millions d'opérations par seconde. L'ordinateur dispose d'une mémoire morte de 2048ko et d'une mémoire vive de 240ko. Il a une masse de 8kg et un volume de 156x205x214mm. Il consomme 7W sous 27V et peut fonctionner entre -40°c et +50°C [7]. 2.3. Le boîtier de contrôleLes différents systèmes du satellite Elektro-L sont contrôlés par le boîtier de contrôle et de commutation BUK (Блок Управления и Коммутации), qui est constitué de quatre chaînes redondantes [3]. 2.4. Les boîtiers automatiques de puissanceCertains systèmes sont commandés par des ordinateurs indépendants appelés boîtiers automatiques de puissance, ou BSA (Блоки Силовой Автоматики). Ils sont au nombre de cinq (BU3, BU4, BU5, BU6 et BU7). Par exemple, le BU3 commande le système SOTR, alors que le BU4 commande les actionneurs pyrotechniques [3]. 
Fig. 2.4.1 : Un boîtier BU du BSA. 2.5. Le capteur solaireLe capteur solaire SDP-1 (Солнечный Датчик Положения), fourni par MOKB Mars, a déjà été utilisé sur les satellites de télécommunications géostationnaires KazSat et Ekspress MD. Il y en a deux sur les satellites Elektro-L. Il a un champ de vision de 185°x5° et une précision de 2,5°. Il consomme 0,85W sous 15V et a une masse de 0,4kg, et un volume de 93x33x5mm [7]. 
Fig. 2.5.1 : Le capteur solaire SDP-1. 2.6. Le capteur stellaireLes capteurs stellaires sont de type AD-1, fournis par MOKB Mars. Il y en a trois sur les satellites Elektro-L. L'AD-1 a déjà été utilisé sur les satellites de télécommunications géostationnaires KazSat et Ekspress MD, ainsi que sur le satellite d'observation de la Terre Monitor-E. Il a un champ de vision de 13°x13° et une sensibilité comprise entre 5,0 et 6,0. Sa précision est de 2 à 15°/s et il peut traiter jusqu'à quinze étoiles simultanément. Il a une masse de 3,85kg, un diamètre de 238mm et une longueur totale de 426mm. Sa consommation électrique ne dépasse pas 15W [7]. 
Fig. 2.6.1 : Le capteur stellaire AD-1. A partir du satellite Elektro-L n°2, l'AD-1 a été remplacé par un capteur stellaire SED26 fourni par l'entreprise française SODERN. Ce capteur a volé pour la première fois à bord du satellite chinois APStar 6 le 12 avril 2005. 
Fig. 2.6.2 : Le capteur stellaire SED26. 2.7. La mesure de vitesse angulaireLe système de mesure de vitesse angulaire (GIVUS) est constitué d'un capteur KIND34-020-01 fourni par le NII PM. Il a une plage de mesure de ±0,4°/s et une masse de13kg [3]. 
Fig. 2.7.1 : La centrale KIND34-020-01, avec et sans son capot de protection. 2.8. Les actionneurs gyroscopiquesL'orientation du satellite Elektro-L est assurée par un système d'actionneurs gyroscopiques KUDM (Комплекс Управляющих Двигателей-Маховиков) appelé Koler-E, fourni par le NII KP. 
Fig. 2.8.1 : le système Koler-E. Il comprend un boîtier de commande et quatre actionneurs gyroscopiques qui permettent de générer un moment de ±0,2N.m et un moment cinétique de ±20N.m.s avec une vitesse de rotation de ±6000tr/min. L'ensemble a une masse de 32kg [9][12]. 
Fig. 2.8.2 : Le boîtier du Koler-E et l'un de
ses actionneurs gyroscopiques. 3. Le système électrique3.1. GénéralitésLe Système d'Alimentation Electrique SES (Система Электроснабжения) de la plate-forme Navigator est dimensionné pour fournir en permanence une puissance de 2000W, sauf dans la phase non éclairée de l'orbite ou le maximum admissible est abaissé à 1500W [1][3]. Il est constitué d'un panneau solaire, d'un ensemble de batteries et d'un boîtier de commande. 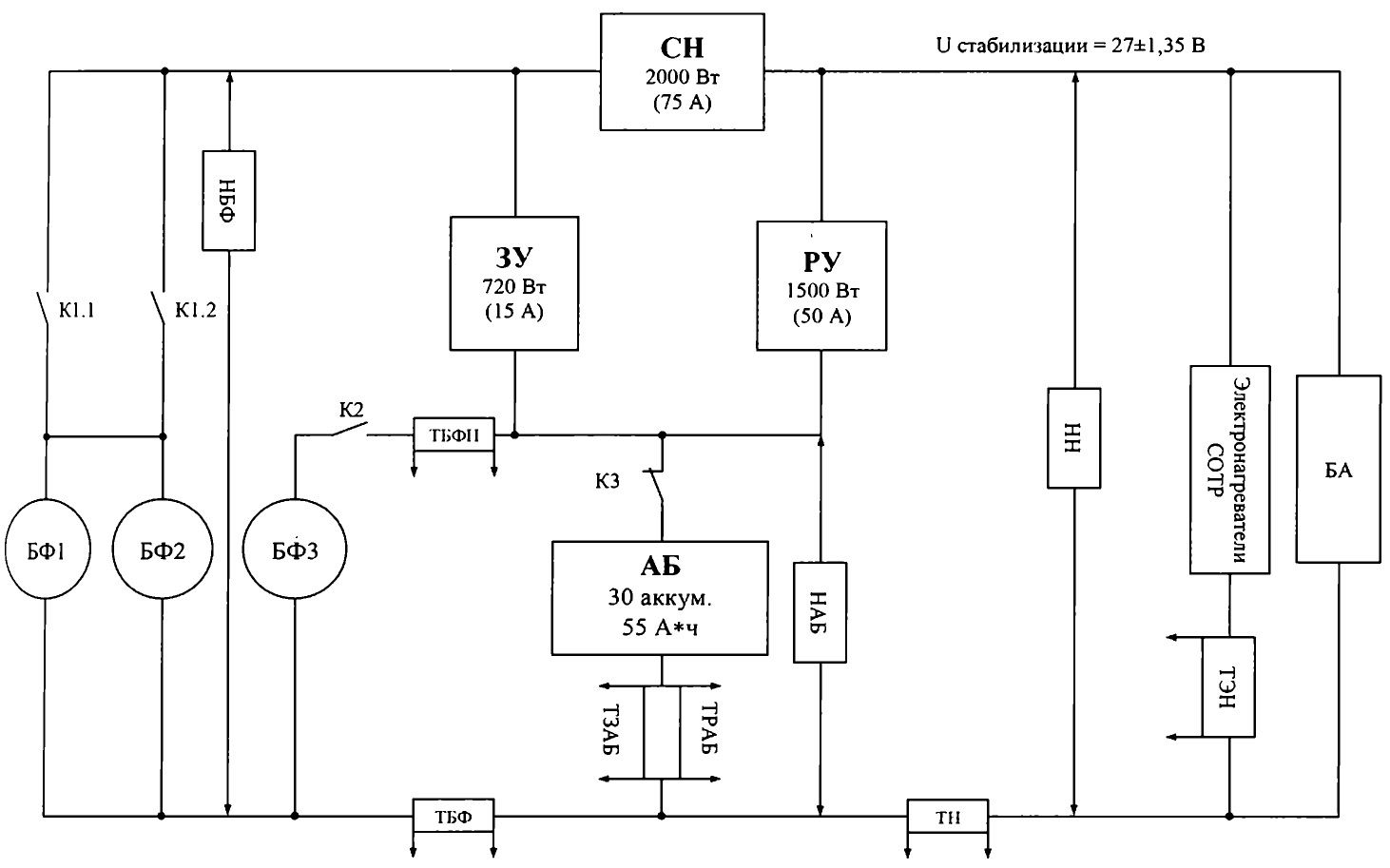
Fig. 3.1.1 : Schéma du système d'alimentation électrique du satellite Elektro-L. La tension est régulée autour de 27,00V ± 1,35V en régime établi [1]. Le panneau solaire est divisé en trois sections : BF1 et BF2 sont connectées à la batterie via le boîtier de charge ZU (Зарядное Устройство), tandis que BF3 est directement connectée à la batterie pour compenser sa décharge [3]. Le système peut fonctionner selon quatre régimes distincts qui sont sélectionnés automatiquement en fonction de la charge de la batterie et de la puissance fournie par le panneau solaire [3] :
- SN : le satellite est alimenté directement
par le panneau solaire via le boîtier de stabilisation de la tension
SN (Стабилизатор Напряжения). La batterie
est déconnectée. 3.2. Le panneau solaireLe panneau solaire de la plate-forme Navigator dans sa version adaptée au satellite Elektro-L est fourni par l'entreprise ISS Rechetniov. Il est constitué de trois cadres en polymère renforcé de fibres de carbone qui supportent des cellules photovoltaïques en arséniure de gallium (GaAs) fournies par PAO Saturn [4]. 


Fig. 3.2.1 : Préparation des panneaux solaires d'Elektro-L chez ISS Rechetniov. Le panneau solaire a une surface totale de 9,8m² et une surface utile de 8,5m2. Sa carcasse a une masse de 40kg [3][5]. 3.3. La batterieLe système électrique d'Elektro-L comprend une batterie de type 30NV-70A fournie par PAO Saturn. Elle a une masse de 65kg et offre une capacité maximale de 72A.h avec une densité énergétique de 42W.h/kg [6]. Elle contient trente accumulateurs nickel-hydrogène (NiH) [3]. 3.4. Le boîtier de commandeLe Complexe des Automatismes et de Stabilisation de la tension KAS-E (Комплекс Автоматики и Стабилизации), fourni par NPTs Polious, permet de contrôler la charge et la décharge des batteries. Il comprend notamment un système de mesure de la charge et génère des données qui sont ensuite transmises au sol via le système de télémesure [1]. Les boîtiers SN, ZU et RU font partie du KAS-E. 4. Le système de télécommandeLe rôle du Système de Télécommande et de Mesure d'Orbite KIS (Командно-Измерительная Система) est de réceptionner les ordres émis par les stations au sol quelle que soit l'orientation du satellite, de les transmettre au système de contrôle (BKU), d'envoyer des compte-rendus et des télémesures au sol et de mesurer des paramètres de navigation [2]. 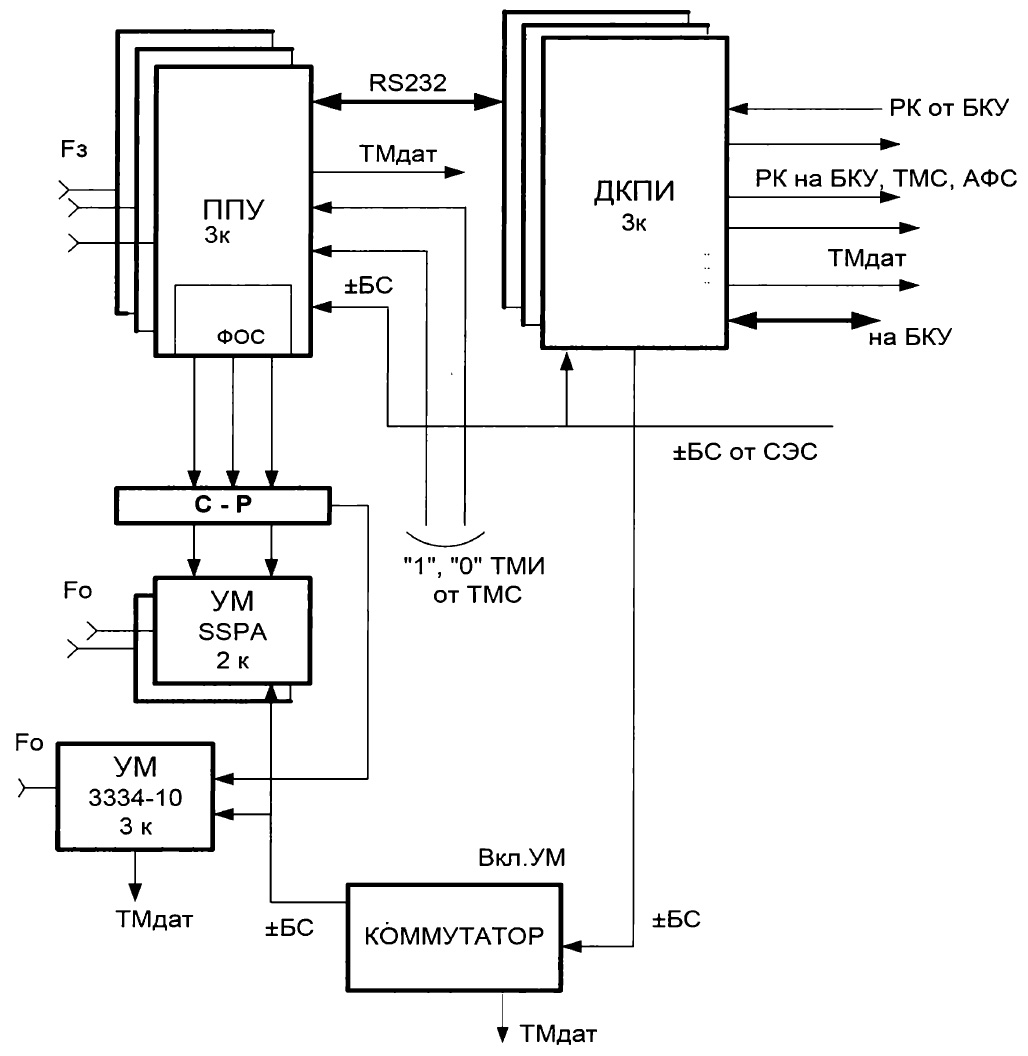
Fig. 4.1 : Schéma du système KIS. Le KIS est fourni par l'entreprise RKS et il est du type LA903. Il a une masse de 16,5kg, fonctionne sous 27V, consomme jusqu'à 80W et émet la télémesure sur 1, 8 ou 32kbit/s. Il est constitué de trois émetteurs-récepteurs ChA924, d'un sommateur ChA874-10, d'un démodulateur TsA048 et d'un commutateur LA100 [2]. 5. Les antennesLa plate-forme Navigator est équipée de quatre antennes omnidirectionnelles MNA (Малонаправленная Антенна) pour permettre au système KIS de communiquer avec le sol. Deux d'entre elles servent à recevoir les télécommandes, et les deux autres à émettre la télémesure. Elles fonctionnent toutes en bande S [2]. 
Fig. 5.1 : Les antennes MNA de réception (à
gauche) et d'émission. 6. Le système de télémesureLe rôle du système de télémesure TMS-E (Телеметрическая Система) des satellites Elektro-L est de rassembler les données fournies par les différents capteurs ainsi que par la charge utile. Il est constitué de quatre modules [1] : - le module de base TMS-B, 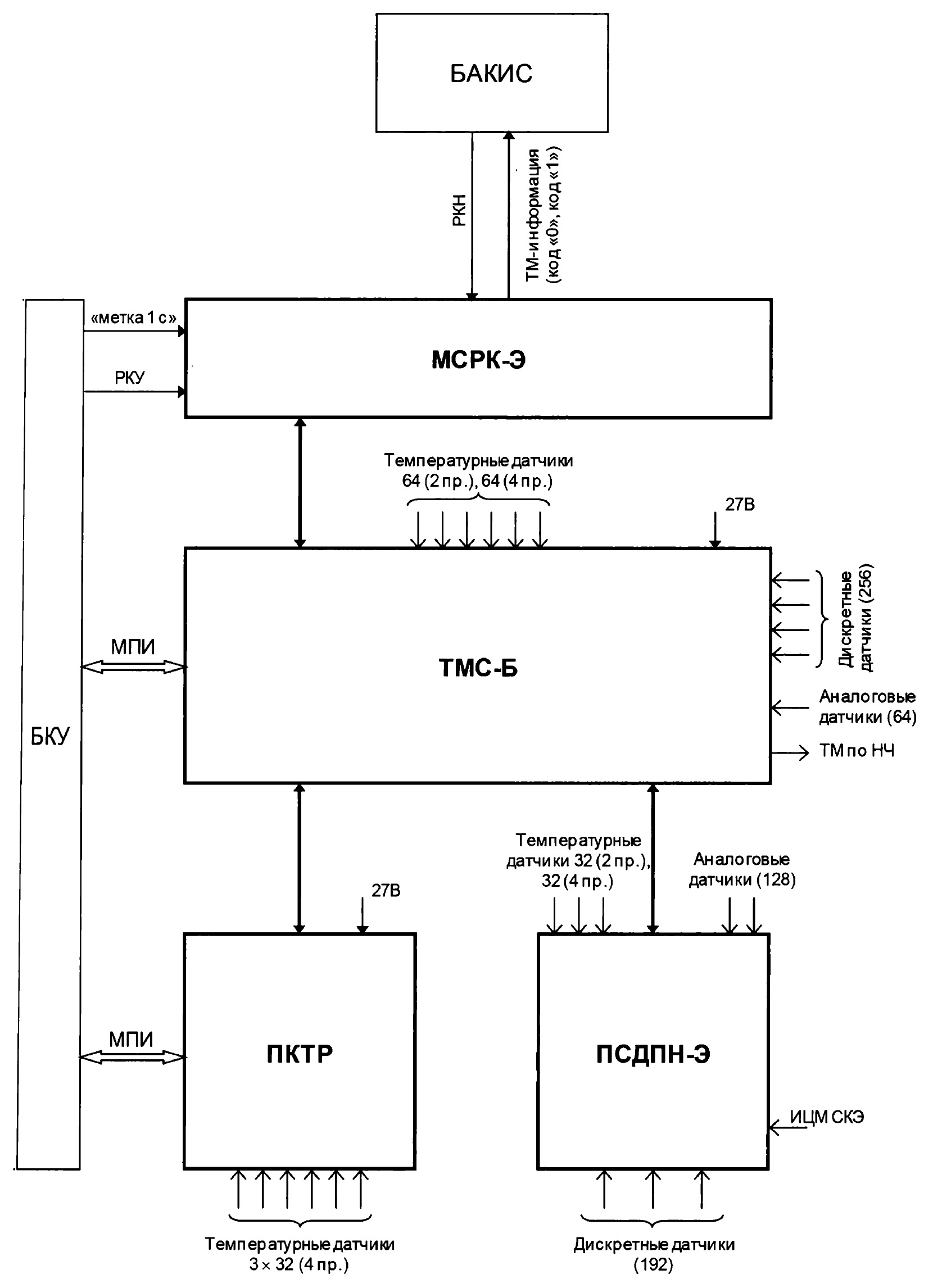
Fig. 6.1 : Schéma du système de télémesure. Le module de base TMS-B reçoit les informations de presque tous les capteurs du satellite et les mémorise. Les sous-système PKTR et PSDPN-E reçoivent les données en provenance respectivement des capteurs de température et des capteurs des différents instruments de la charge utile, puis les transmettent au TMS-B. Ce dernier transmet ensuite les données au MSRK-E qui les envoie à son tour au KIS pour qu'elles soient transmises vers le sol [3]. 
Fig. 6.2 : Les différents modules du système TMS-E. 7. Le système d'orientation du panneau solaireLe Système d'Orientation du Panneau Solaire SOSB (Система Ориентации солнечной батареи) permet de maintenir la face active du panneau pointée en direction du Soleil afin de garantir l'alimentation électrique. Il est constitué d'un bloc électromécanique EMB de 10kg qui comporte un moteur électrique, un réducteur et un capteur de position angulaire placé sur le réducteur. Le tout est commandé par un boîtier électronique de 2kg [1]. 
Fig. 7.1 : Schéma du système d'orientation du panneau solaire. 8. Le système de régulation thermiqueLe Système de Conditionnement Thermique SOTR (Система Обеспечения Теплового Режима) permet de maintenir le satellite dans la plage de température acceptable en dissipant la chaleur émise par les systèmes de bord ainsi que celle reçue de l'extérieur. D'un point de vue thermique, le satellite est divisé en cinq sous-systèmes [2] : - l'ensemble moteur (DU), Pour les trois premiers, le refroidissement se fait de manière passive grâce à la protection thermique. Des réchauffeurs électriques permettent à l'inverse de produite de la chaleur quand le satellite est dans l'ombre de la Terre [2]. Pour les deux derniers systèmes, le refroidissement se fait par des radiateurs à caloducs. C'est un procédé qui permet de transporter la chaleur grâce au principe du transfert thermique par transition de phase d'un fluide (chaleur latente). La plate-forme est équipée de six Radiateurs Conducteurs de Chaleur TPR (Теплопровод Радиатор) dont la disposition est donnée sur la figure 8.1 [2]. 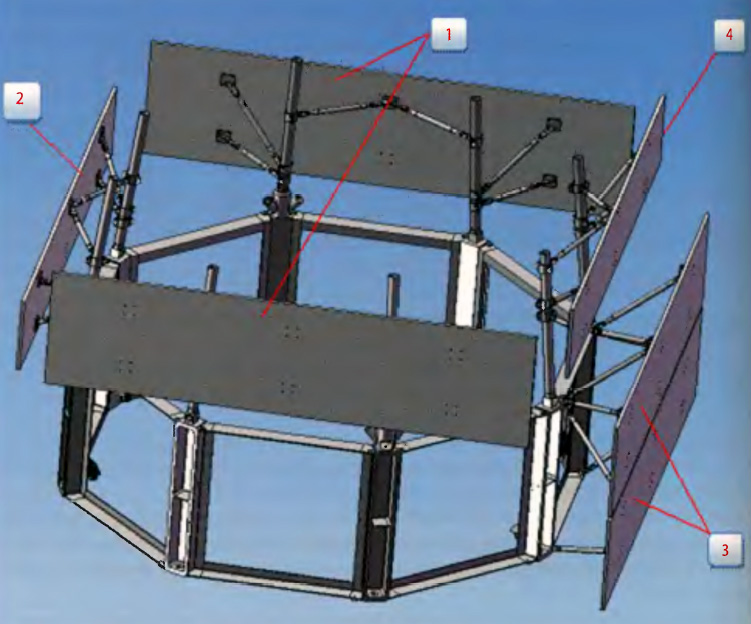
Fig. 8.1 : Disposition des six TPR. Chaque TPR est constitué d'une pompe, d'une cavité de compensation, de caloducs pour transporter la vapeur et la phase liquide et d'un radiateur. L'évaporation se fait au niveau de la pompe, et la condensation au niveau du radiateur [2]. Le caloporteur utilisé est le propène [10]. 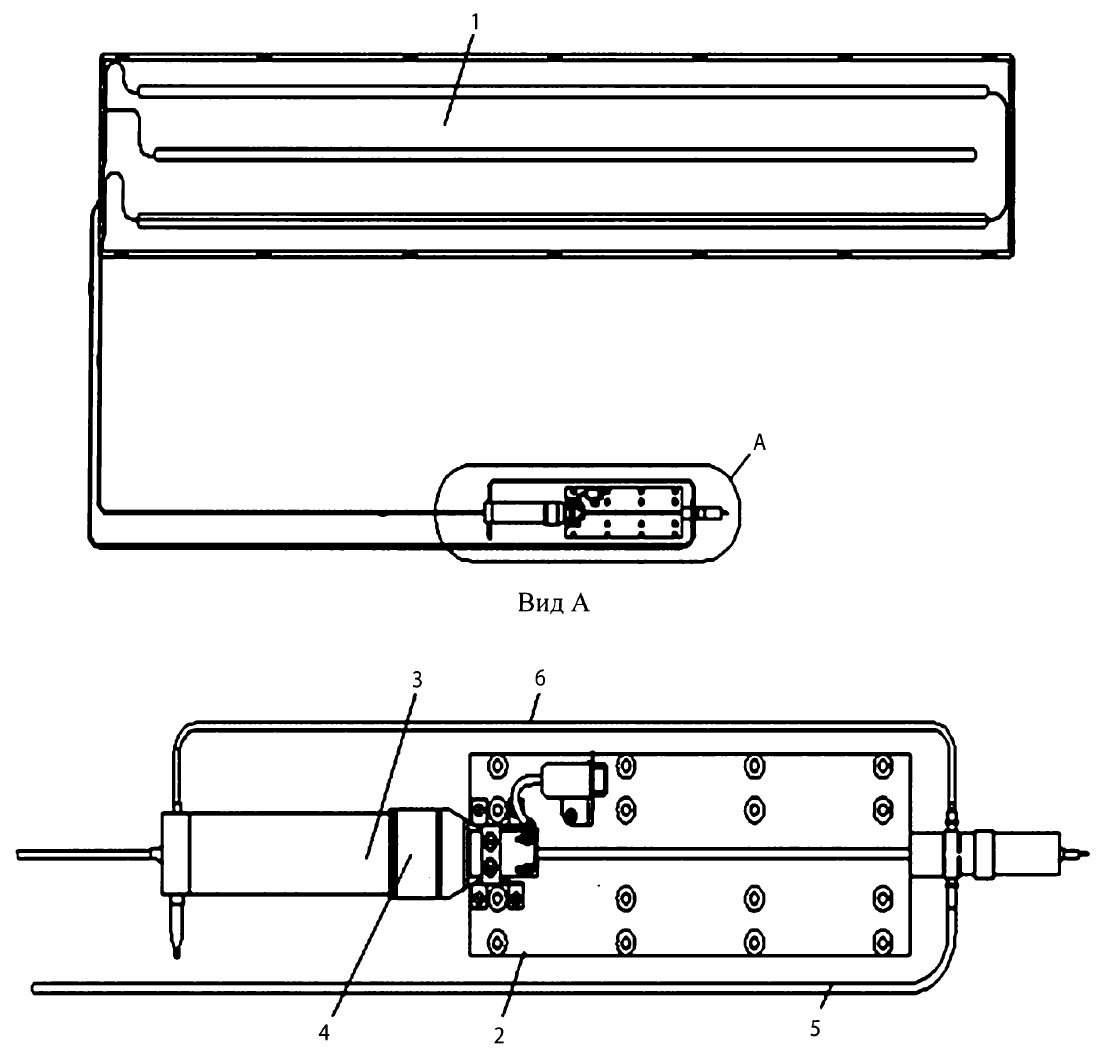
Fig. 8.2 : Schéma d'un TPR. 9. L'ensemble moteurLe rôle de l'ensemble moteur DU (Двигательная Установка) de la plate-forme Navigator est de réaliser les corrections d'orbite et de contrôler l'orientation du satellite selon ses trois axes dans la phase qui suit sa séparation de l'étage supérieur du lanceur et dans les phases où les roues à réaction arrivent à saturation [1]. L'ensemble moteur est constitué de : - quatre Blocs de Moteurs de Correction DBK (Двигательный Блок Коррекции), qui comprennent chacun deux moteurs de correction DK (Двигатель Коррекции) : l'un pour le fonctionnement normal, l'autre en secours. Ce sont des moteurs TK500M fournis par l'OKB Fakel[1]. 


Fig. 9.1 : Le moteur TK500M et le bloc DBK. - huit Blocs de Moteurs de Stabilisation et d'Orientation DBS (Двигательный Блок Стабилизации и Ориентации), qui contiennent chacun deux moteurs de stabilisation DS (Двигатель Стабилизации) : l'un pour le fonctionnement normal, l'autre en secours. Ce sont des moteurs de type K50-10.1 fournis par l'OKB Fakel [1]. 

Fig. 9.2 : Le moteur K50-10.1 et le bloc DS. Les moteurs K50-10.1 et TK500M sont tous les deux des moteurs thermocatalytiques à hydrazine. Ils peuvent fonctionner en mode continu, c'est-à-dire avec une durée d'allumage supérieure à 4", ou en mode impulsion, avec une durée d'allumage comprise entre 0,1" et 4" [1]. Leurs principales caractéristiques sont données dans le tableau 9.1. Les trois réservoirs sphériques de l'ensemble moteur contiennent une quantité totale de 579kg d'hydrazine (193kg chacun). La pressurisation est réalisée par de l'hélium via une membrane métallique. Le ballon d'hélium a une capacité de 1,02kg [1].
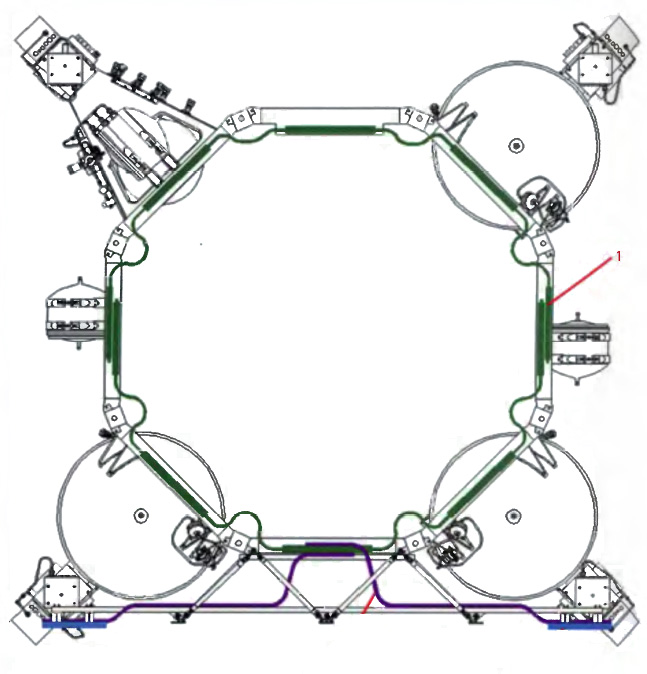
Fig. 9.3 : Schéma de l'ensemble moteur. 10. Le système de navigation autonomeLe Système de Navigation Autonome SAN (Система Автономной Навигации) permet au satellite de mesurer son vecteur vitesse et son altitude en se basant sur les signaux des satellites GLONASS et GPS. Il est fourni par ISS Rechetniov et a été ajouté à partir d'Elektro-L n°2 [13]. 
Fig. 10.1 : Le boîtier du système SAN. Bibliographie
[1] POLICHTCHOUK, G., Автоматические космические аппараты для фундаментальных и прикладных научных исследований, Moscou, 2010, pp. 553-574 Dernière mise à jour : 4 février 2023 |
| |||||||||||||||||||||||||||||