Rassviett | Description1. GénéralitésLe module Rassviett (521GK) se présente sous la forme d'un cylindre, avec deux hémisphères à ses extrémités. Il a une masse de 5075kg, une longueur totale de 6525mm, et un diamètre de 2201mm. Il a été mis en orbite par la navette spatiale américaine Atlantis lors du vol STS-132 de mai 2010. Dans sa configuration de lancement, il emportait 1392kg de fret en interne, ainsi que quatre charges externes (1548kg au total) : - le sas ChK
du module Nauka, Avec ce chargement, il avait dans sa configuration de lancement une masse de 8015kg, une longueur de 6590mm, une largeur de 4966mm et une hauteur de 4552mm. 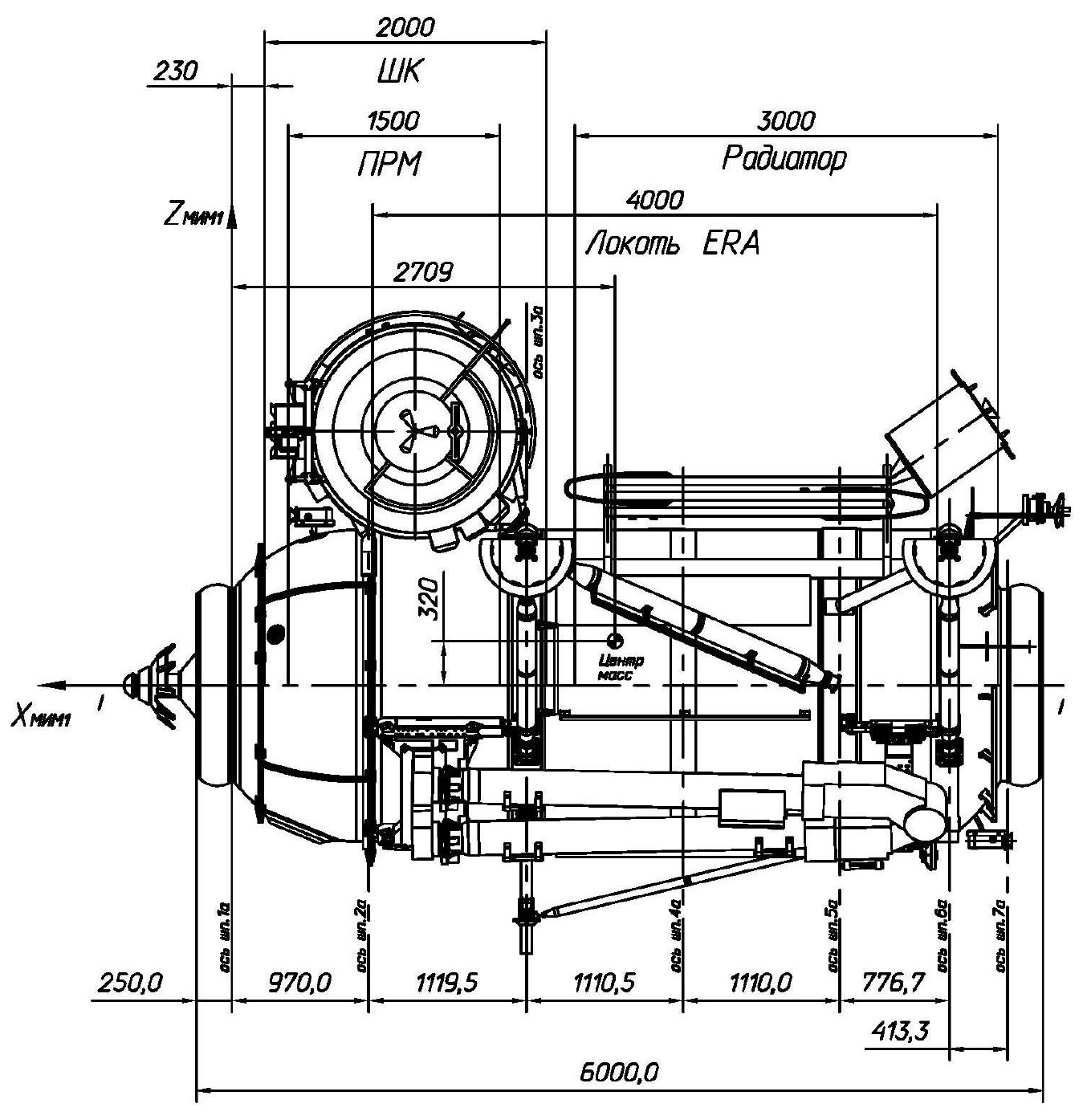 Fig. 1.1 : Schéma du
module MIM-1 « Rassviett » (521GK) 
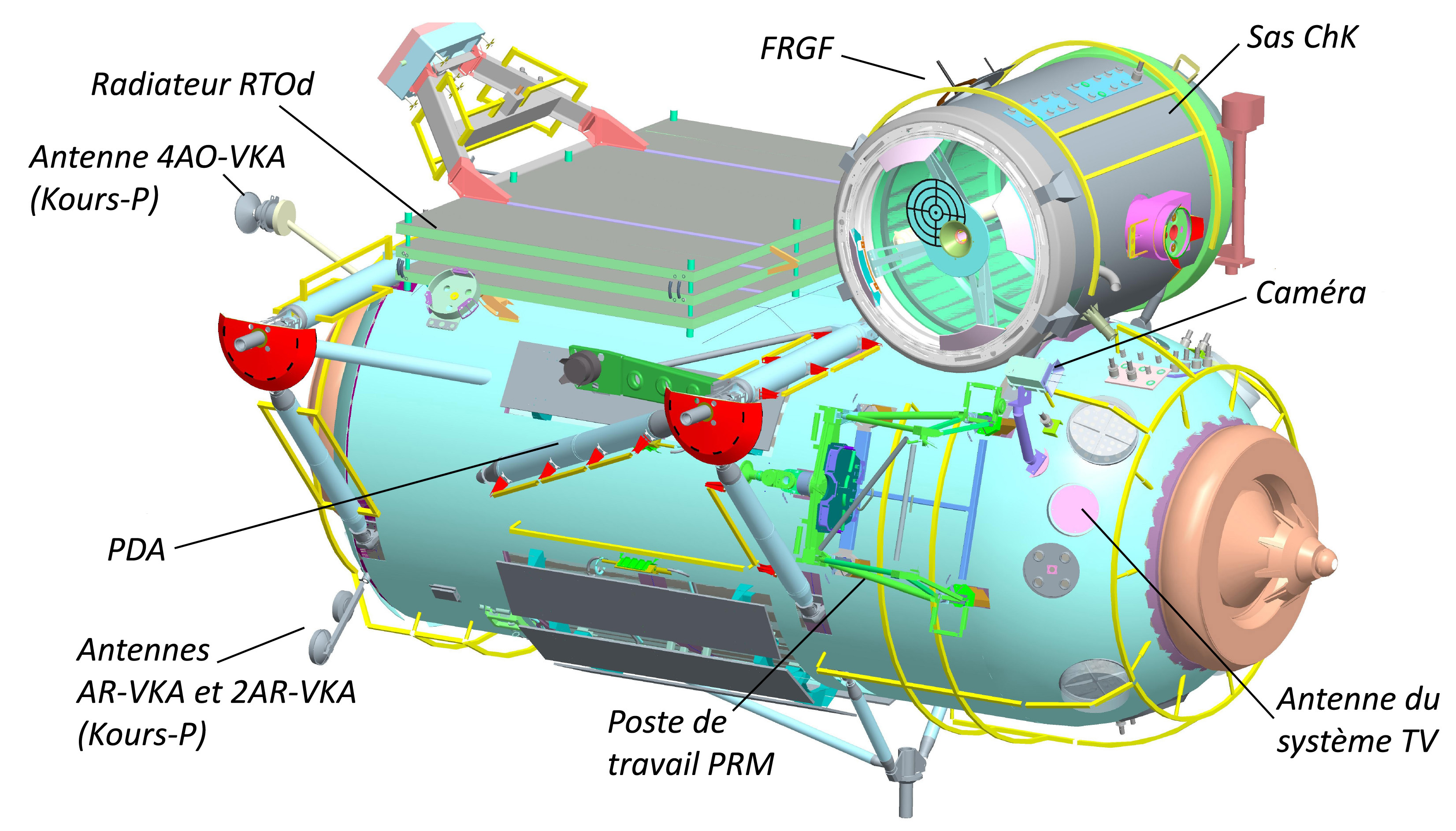 Fig.
1.2 : Le module Rassviett en configuration de
lancement. 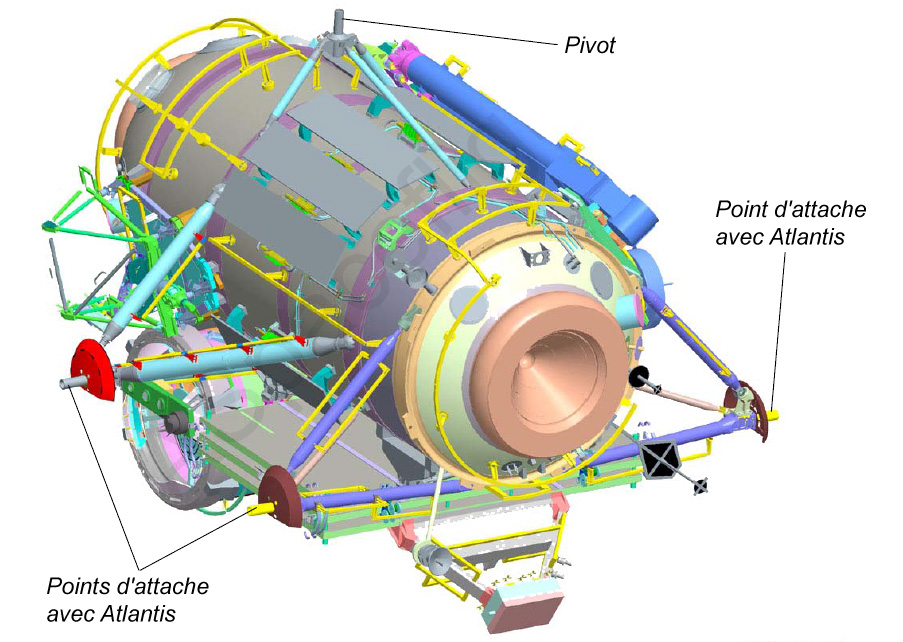 Fig. 1.3 : Schéma du
module MIM-1 « Rassviett » (521GK) 2. AmarrageLe module Rassviett est doté de deux pièces d'amarrage de type SSVP : 2.1. La pièce activeLa pièce d'amarrage SSVP active est située à l'avant du module. Elle permet l'amarrage permanent et définitif avec la pièce nadir de l'adaptateur hermétique (GA) du module Zaria. Comme l'amarrage a été effectué manuellement à l'aide du bras manipulateur Canadarm2, la pièce n'est pas équipée d'un système de rendez-vous automatique. 
Fig. 2.1.2 : Vue de la pièce d'amarrage active (elle donne sur le GA de Zaria). 
Fig. 2.1.3 : Vue de la pièce d'amarrage active depuis le GA de Zaria. 
Fig. 2.1.4 : Vue de la pièce d'amarrage active depuis le GA de Zaria. 2.2. La pièce passiveLa pièce d'amarrage SSVP passive est située à l'arrière du module. Elle permet aux vaisseaux Soyouz et Progress de venir s'amarrer au Segment russe, tout en restant à bonne distance du module américain PMM. Pour permettre les rendez-vous automatiques, cette pièce d'amarrage est équipée du système Kours-P, qui comporte notamment trois antennes (4AO-VKA, AR-VKA et 2AR-VKA). Le calculateur K2-VKA-01 du Kours-P est situé dans le module Zvezda, et avant chaque amarrage il faut le configurer pour qu'il identifie Rassviett comme point d'arrivée du vaisseau en approche. 
Fig. 2.2.1 : Vue de la pièce d'amarrage passive et de ses trois antennes Kours-P. 
Fig. 2.2.2 : La pièce d'amarrage passive de Rassviett, 2.3. Le système de télévision (TVS)Le module Rassviett est équipé d'un système de télévision externe. Il a permis, lors de l'amarrage de Rassviett sur Zaria, de guider les astronautes américains qui devaient insérer avec précision la tige de la pièce d'amarrage active de Rassviett dans le cône de la pièce passive de Zaria. Ce système de télévision (TVS) est constitué du complexe vidéo KL-100-44M, qui comprend :
- une caméra KL-153, 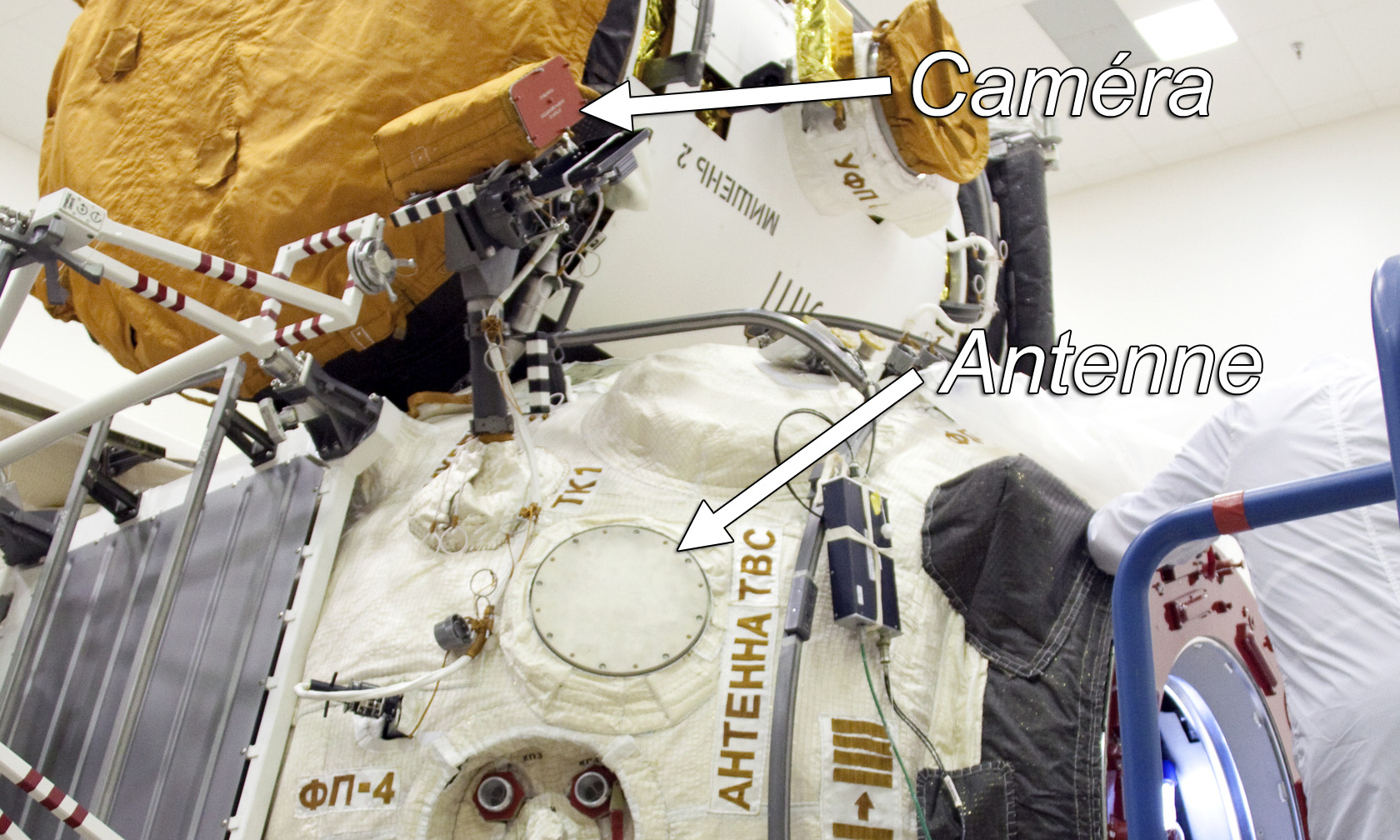
Fig. 2.3.1 : Vue de la caméra et de l'antenne du TVS avant le lancement. Une fois que le module Rassviett a été amarré à son emplacement définitif, la caméra ne servait plus à rien. En revanche, il serait utile de disposer d'images vidéo des vaisseaux venant s'amarrer sur la pièce passive. Pour cela, il faut déplacer la caméra de l'avant du module Rassviett vers l'arrière. La caméra KL-153 a été démontée le 15 novembre 2010 lors d'une sortie dans l'Espace. Les cosmonautes Oleg SKRIPOTCHKA et Fiodor YOURTCHIKHINE devaient la remonter de l'autre côté du module, mais ils n'y sont pas parvenus à cause d'un problème avec l'isolation thermique. Ils l'ont donc ramenée avec eux à bord de la station. Elle a finalement pu être installée au niveau de la pièce d'amarrage passive lors de la sortie suivante, le 21 janvier 2011. 
Fig. 2.3.2 : La caméra KL-153 est mise en place à l'arrière de Rassviett, A son nouvel emplacement, la caméra KL-153 n'a plus besoin de communiquer par radio. Ses données sont directement transmises par une liaison filaire au système vidéo de Zvezda, via le système vidéo de Zaria. Le transmetteur KL-108M-M n'a donc plus aucune utilité, et il est démonté le 9 juin 2010. 2.4. Le système de transfert d'ergolsLe module Rassviett est équipé d'un système SODT qui permet de transférer des ergols depuis le vaisseau amarré (Soyouz ou Progress) vers le module Zaria. 3. Système électriqueLe module Rassviett était équipé d'un système électrique (SES) qui lui fournissait du courant pendant les essais au sol et pendant le temps du transfert entre la soute de la navette Atlantis et son amarrage à Zaria. 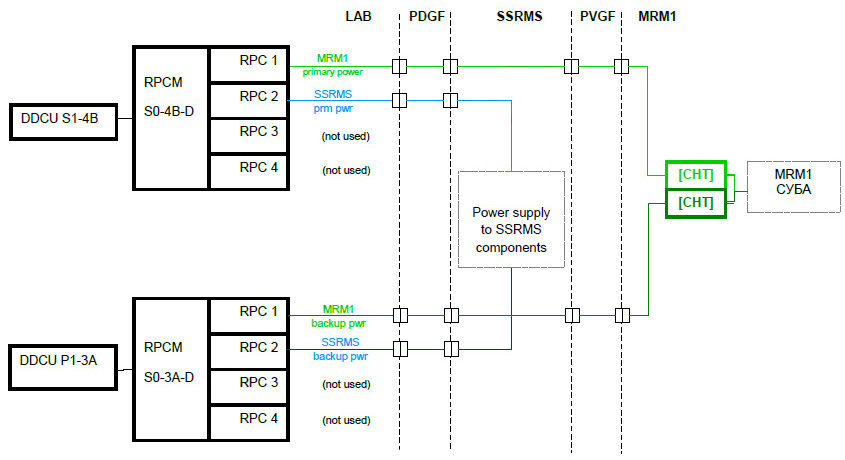 Fig. 3.1 : Schéma de
la distribution électrique entre le Segment américain et Rassviett Une fois l'amarrage réalisé, Rassviett est alimenté directement par le Segment russe, au travers du système SUBA (voir section 5), et le SES n'est plus utile. Il a donc été démonté. Le SES était constitué de deux régulateurs de tension et de courant SNT-50 (Стабилизатор Напряжения и Тока), qui convertissaient le 120V en 28V. 4. Le système de contrôle de l'atmosphèreLe module Rassviett ne dispose pas de ses propres systèmes de contrôle de l'atmosphère, et il est pour cela dépendant de Zvezda. Son système SOGS consiste simplement en un ensemble de vannes et de capteurs qui régulent le flux d'air avec Zvezda. 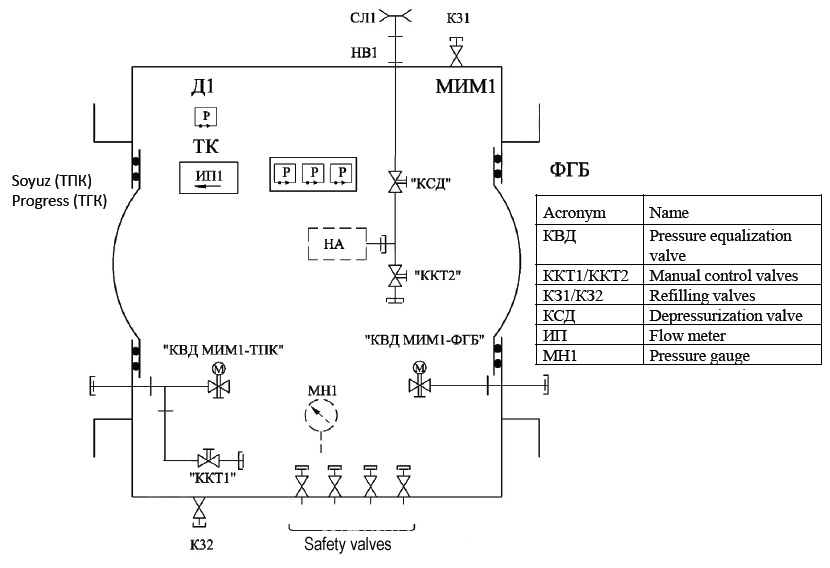 Fig. 4.1 : Schéma du
système SOGS. 5. Le Système de Contrôle Embarqué (SUBA)Le SUBA (Система Управления Бортовые Аппаратами) est le système principal du module Rassviett. Ses deux rôles sont, d'une part, de fournir de la puissance électrique aux utilisateurs et, d'autre part, d'assurer le contrôle-commande des différents systèmes. 5.1. L'alimentation électriqueLa puissance électrique de Rassviett provient soit des panneaux solaires de Zvezda, soit des panneaux solaires américains. Dans les deux cas, elle transite par le module Zaria. La distribution électrique de Rassviett est organisée autour de deux tableaux 28V, appelés РЩП-А1 et РЩМ-А, qui renvoient la puissance vers les utilisateurs. En configuration normale, ces deux tableaux sont alimentés par le module Zaria au travers du boîtier BKPT. 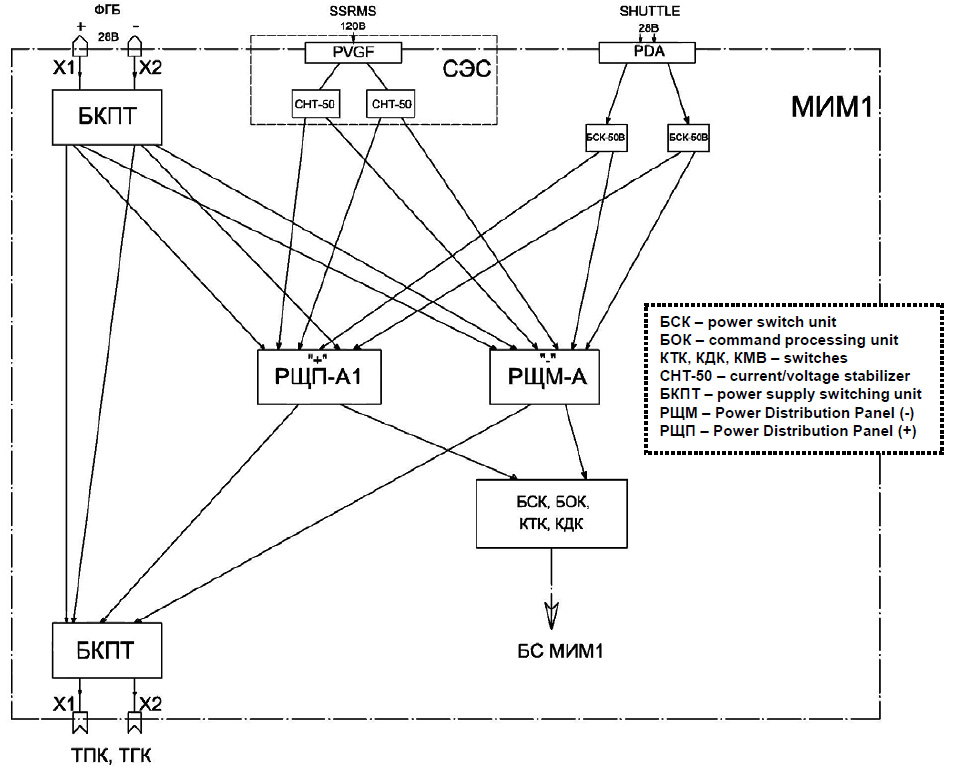 Fig. 5.1.1 : Schéma de
la distribution électrique du module Rassviett. Pendant le vol à bord de la navette Atlantis, les tableaux étaient alimentés directement par la navette, au travers des adaptateurs PDA. Enfin, pendant le transfert de la navette vers la station, réalisé à l'aide du bras Canadarm2, ils étaient alimentés par le système SES, décrit dans la section 3. Les vaisseaux Soyouz ou Progress amarrés à Rassviett peuvent être alimentés soit directement depuis Zaria grâce au boîtier BKPT, soit par les tableaux РЩП-А1 et РЩМ-А de Rassviett. 5.2. Le contrôle-commandeLes différents systèmes du module Rassviett sont gérés par deux ordinateurs redondants : TVU-1 et TVU-2. 
Fig. 5.2.1 : Schéma de la distribution électrique du module Rassviett. L'un de ces deux ordinateurs (situé derrière le panneau n°203) est tombé en panne et a été remplacé le 23 février 2011. En août 2011, le TVU-2 tombe également en panne. 6. Le Système de Régulation Thermique (SOTR)Le système de régulation thermique de Rassviett est constitué de deux boucles redondantes (GK1 et GK2) dont le rôle est d'évacuer les calories afin de protéger la structure du module et ses équipements embarqués. Chaque boucle est constituée : - d'une pompe ENA,
qui met le liquide de refroidissement en circulation, L'échange dans chaque échangeur GZhT est favorisé par un ventilateur (V1 et V2). De plus, trois ventilateurs (TsV1, TsV2 et TsV3) créent un flux d'air à l'intérieur du module (le TsV2 a été changé le 6 décembre 2012). Un sixième ventilateur (VK), améliore le confort des cosmonautes.  Fig. 6.1 : Schéma du
système SOTR de Rassviett. Le système de contrôle du SOTR (appelé SOTR SU) a deux rôles. Le convertisseur PST-90 met automatiquement hors-service un ventilateur ou une pompe dont la vitesse est hors-critère. Le boîtier BOV-91 arrête automatiquement un ventilateur dont la tension augmente au-delà des seuils de tolérance. 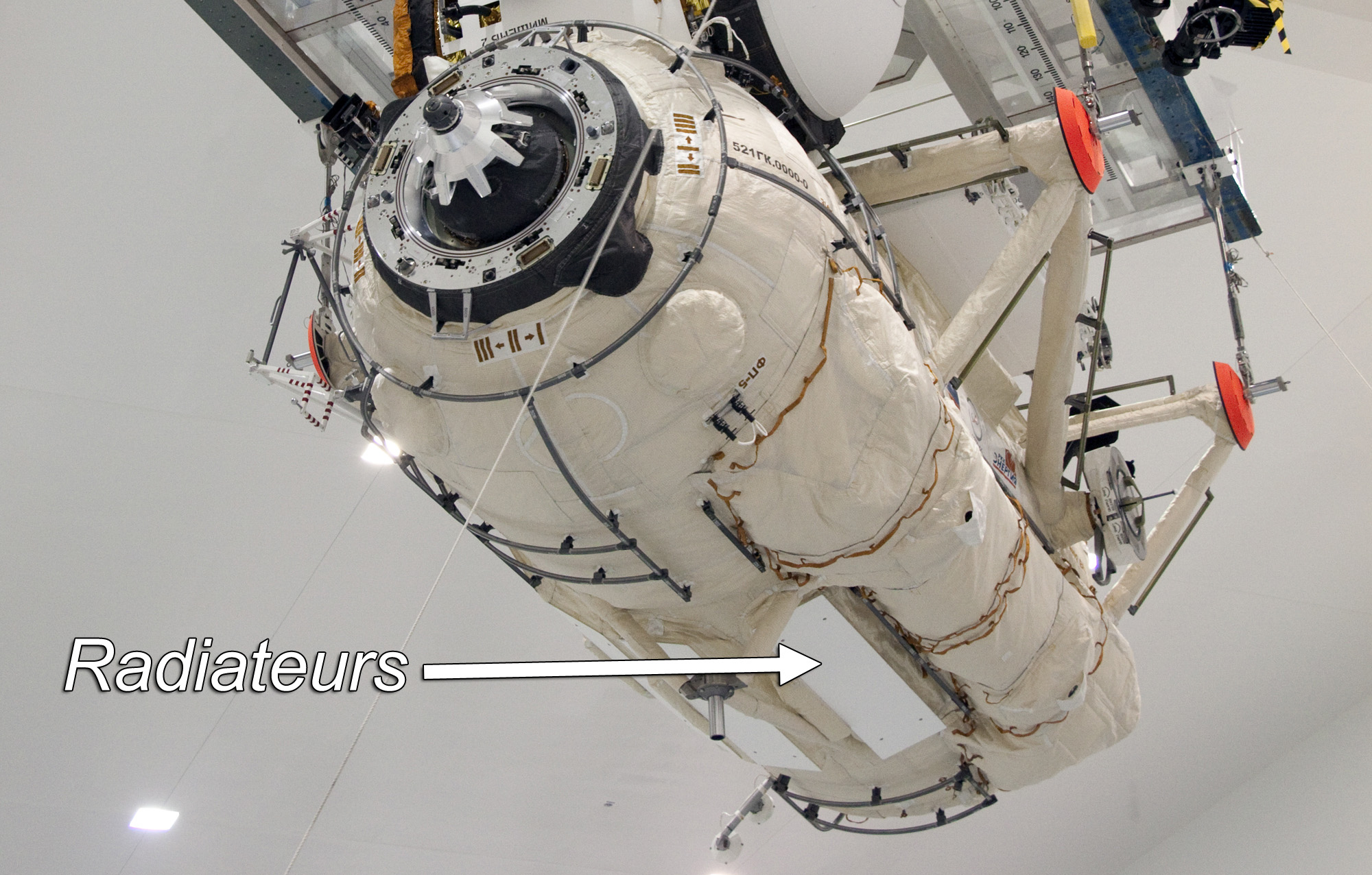 Fig. 6.2 : Emplacement
des radiateurs du SOTR. 7. Aménagement intérieurLe module Rassviett a un volume intérieur total de 21m3. Huit baies instrumentées (URM) peuvent y être installées, pour réaliser diverses expériences scientifiques. 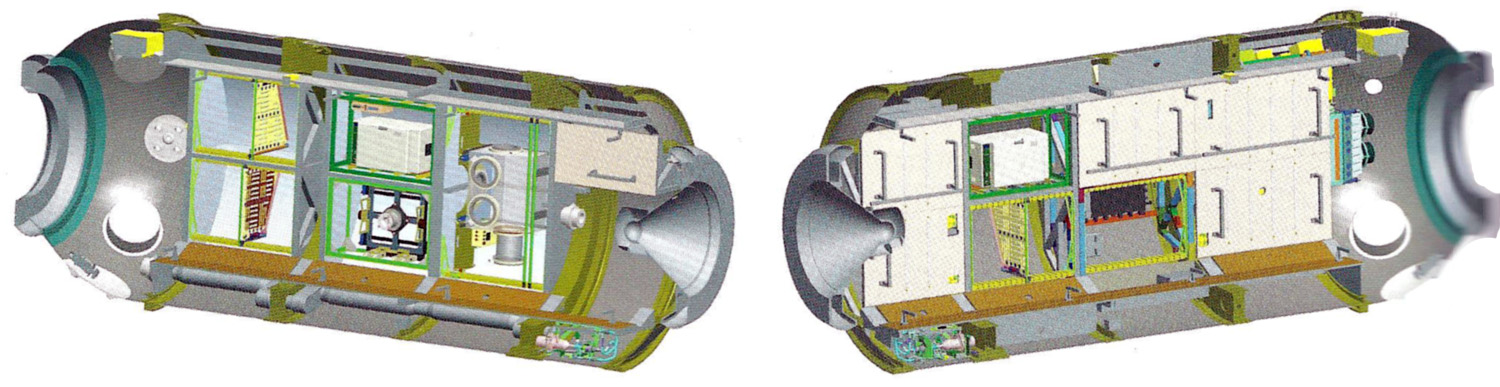 Fig. 7.1 :
Disposition des huit baies URM. Les principaux équipements scientifiques installés à bord de Rassviett sont la boîte à gants Glavboks-S, les fours thermostatiques TBU-N et TBU-V et la plate-forme vibrante VZP-U. 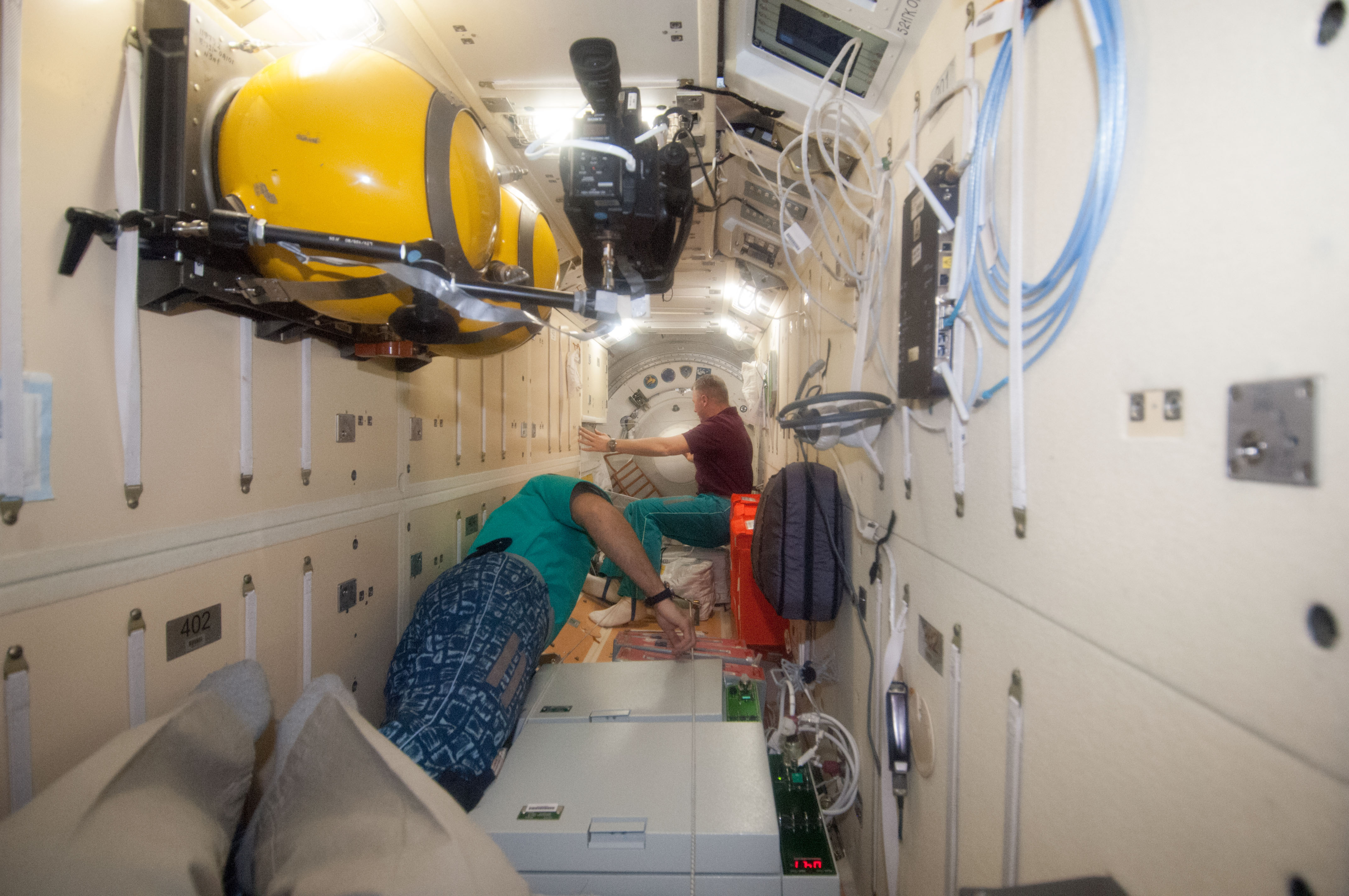 Fig. 7.2
: Vue de l'intérieur de Rassviett, le 17 novembre 2012. 8. Interfaces avec la navette AtlantisPour son transport dans la soute de la navette Atlantis, le module Rassviett était arrimé par quatre points d'attache, et un pivot le maintenait en place. L'interface électrique était un PDA (Payload Disconnect Assembly), dont on voit l'emplacement sur les figures 1.2.b et 5.1.1. Rassviett a pu être saisi par le bras Canadarm2 grâce à un point d'attache PVGF. Bibliographie[1] KOSTAK, C., MRM1 Systems
Overview, disponible sur NasaSpaceFlight L2 Dernière mise à jour : 28 avril 2013 |
|