Fobos | La plate-forme1. GénéralitésLes sondes 1F sont constituées du Bloc Orbital OB (Орбитальный Блок) et de l'Ensemble Moteur Autonome ADU (Автономная Двигательная Установка). La masse totale est de 6220kg, dont 3575kg d'ergols et 540kg de charge utile scientifique. 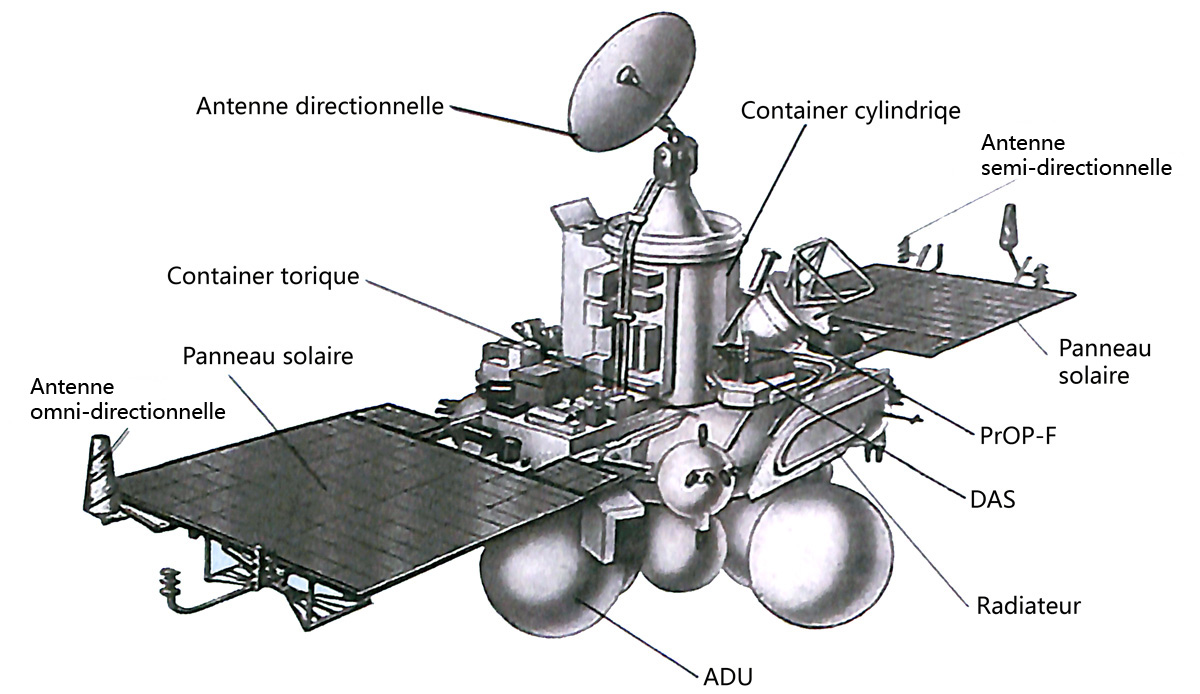
Fig. 1.1 : Schéma général de la sonde Fobos-2. 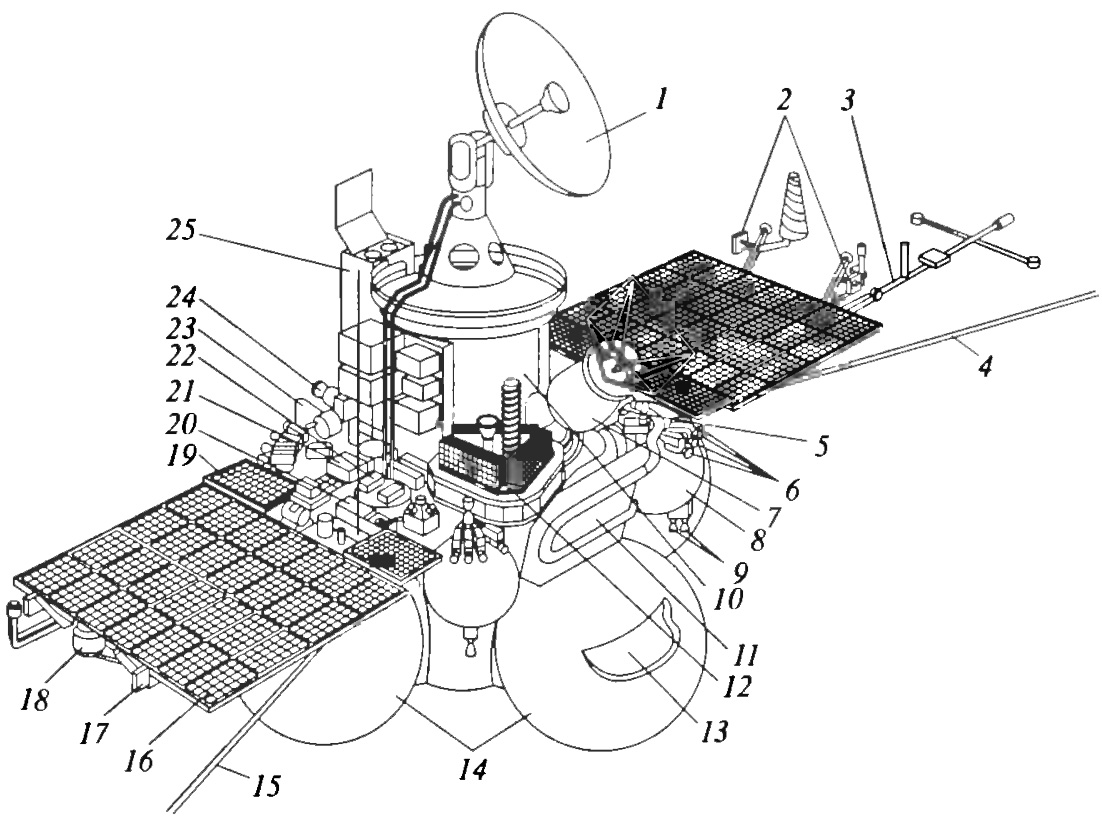
Fig. 1.2 : Schéma général de la sonde Fobos-2. 2. L'Ensemble Moteur AutonomeL'Ensemble Moteur Autonome (ADU) est utilisé pour fournir le delta-V nécessaire à l'injection sur une trajectoire Terre-Mars (car le Bloc D-2 n'est pas suffisant), à réaliser les corrections de trajectoire entre la Terre et Mars, et à réaliser l'injection sur orbite martienne [3]. Il est constitué de huit réservoirs sphériques (quatre principaux et quatre périphériques), du système de pressurisation, d'un boîtier de commande et du moteur S5.92, fourni par le KB KhimMach. 
Fig. 2.1 : Le moteur S5.92. Ce moteur est largement décrit dans la section de Kosmonavtika consacrée à l'étage Fregat. Il peut fonctionner soit en mode de forte poussée (2024kgf avec une impulsion spécifique de 327"), soit en mode de faible poussée (1418kgf avec une impulsion spécifique de 316"). Il fonctionne avec de l'UDMH et du N2O4 et peut être allumé sept fois. Voir la description du moteur S5.92 :
Pendant la poussée du S5.92, la sonde est stabilisée en tangage et en lacet par deux tuyères verniers. La stabilisation en roulis est réalisée par les moteurs de faible poussée (DMT) de la sonde elle-même [3]. Les quatre réservoirs principaux ont un diamètre de 720mm, et les quatre réservoirs périphériques un diamètre de 1020mm. Les réservoirs périphériques contiennent un total de 3000kg d'ergols. Le système de pressurisation, qui permet au moteur S5.92 de démarrer dans des conditions de microgravité, est constitué de quatre ballons de gaz à haute pression (deux de 23,6L et deux de 8L) et d'un ensemble de vannes qui les relient aux réservoirs d'ergols [3]. 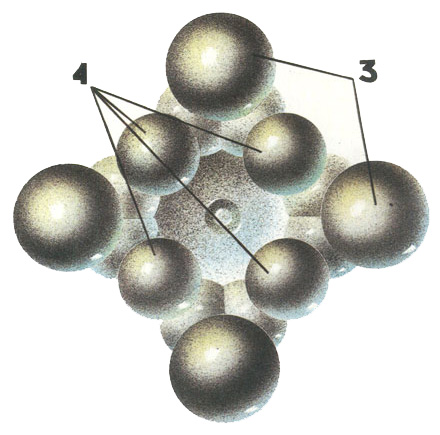
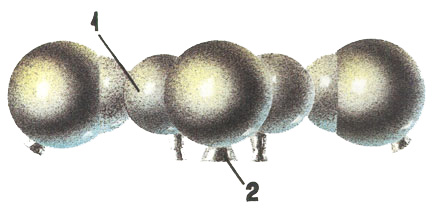
Fig. 2.2 : Vues de dessous et de profil de l'ADU. Le moteur est protégé thermiquement par un capot amovible qui est ouvert par un moteur électrique avant l'allumage, puis refermé. Les réservoirs, quant à eux, sont calorifugés et sont maintenus en température par un système de traçage [3]. 3. Le Bloc Orbital3.1. Conception généraleLe Bloc Orbital (OB) des sondes Fobos est construit autour de deux containers : l'un torique, qui constitue la base de la sonde, et l'autre cylindrique, placé verticalement au-dessus du premier (cf. fig. 1.1) [3]. 3.2. Le système de stabilisation et d'orientationL'injection sur la trajectoire Terre-Mars est réalisée par le Bloc D-2 et par l'ADU de la sonde Fobos. Durant les phases de fonctionnement de ce dernier, la sonde maintient son orientation à l'aide de son Ensemble Moteur d'Orientation et de Stabilisation DUOiS (Двигательная Установка Ориентации и Стабилизации). Ce système est de plus utilisé une fois l'orbite martienne atteinte pour réaliser les corrections d'orbite après le largage de l'ADU. Le DUOiS est constitué de cinq réservoirs sphériques d'hydrazine, et de vingt-huit Moteurs de Faible Poussée DMT (Двигатель Малой Тяги) fournis par le KB KhimMach. Quatre des réservoirs d'hydrazine sont disposés autour du container torique, et le cinquième est au centre de celui-ci [3]. Les moteurs DMT sont de deux types [3][6] :
- vingt-quatre moteurs S5.221 d'une poussée de 50N, 
Fig. 3.2.1 : Les moteurs S5.221 (à gauche) et S5.216. Le moteur S5.221 est décrit plus en détail dans la section consacrée à l'étage Fregat :
Tous les moteurs DMT sont disposés sur les réservoirs sphériques d'hydrazine. Sur chaque réservoir, on trouve :
- deux S5.221 dirigés vers le bas (+x), 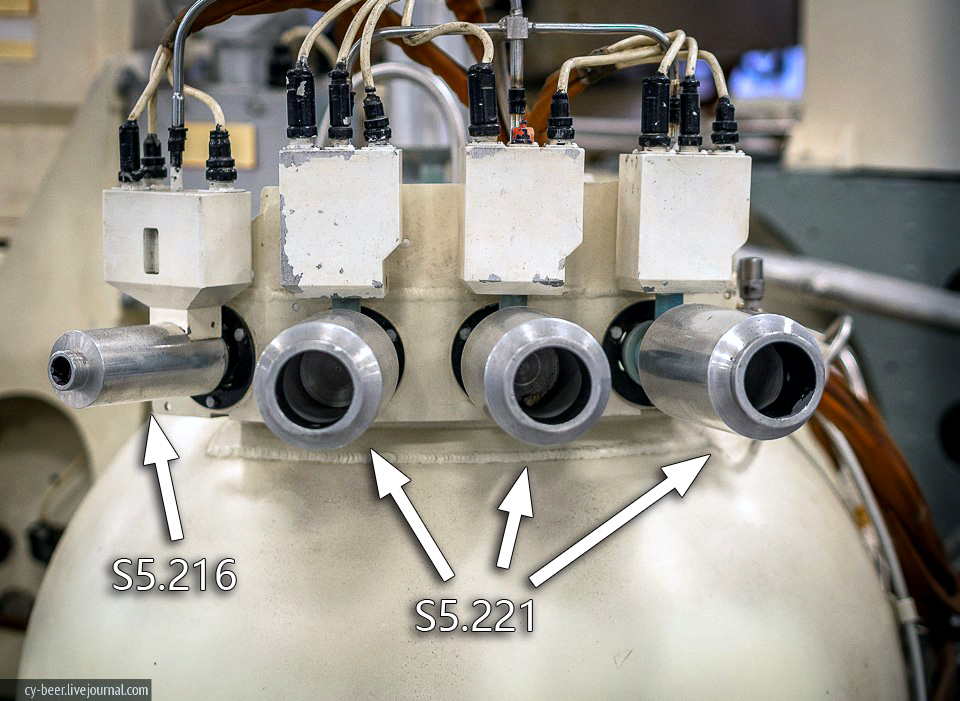
Fig. 3.2.2 : Vue des moteurs dans le plan yOz. 
Fig. 3.2.3 : Vue des moteurs orientés selon l'axe vertical. L'orientation de la sonde peut également être contrôlée par un ensemble de vingt-quatre moteurs à gaz GD (Газовый Двигатель), qui fonctionnent à l'hydrazine passé à l'état gazeux à l'aide d'un générateur de gaz. Certains GD sont disposés à l'extrémité des panneaux solaires, d'autres sur les barres de soutien des réservoirs d'hydrazine [3]. 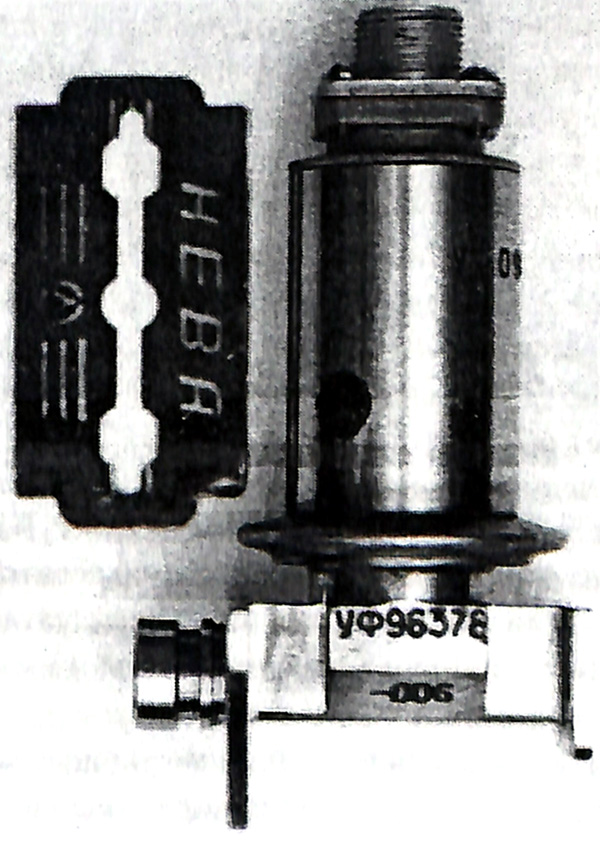
Fig. 3.2.4 : Un moteur GD. Les GD sont fournis par le KTsKBA de Kiev. Leurs électrovannes d'alimentation sont qualifiées pour 106 cycles à des pression allant jusqu'à 0,5MPa et dans une gamme de températures comprises entre -60°C et 80°C [8]. 3.3. Le système de contrôleLes sondes 1F sont commandés par leur Complexe de Contrôle Embarqué BUK (Бортовой Управляющий Комплекс), fourni par la filiale de Fili de la NPO AP. Le BUK est conçu autour de l'ordinateur de bord LG499 à trois voies redondantes, développé sur la base de l'ordinateur M4M par la NPO Elektropribor [3], et produit par le PO Monolit de Kharkov [4]. Le M4M a déjà volé à de nombreuses reprises sur plusieurs missiles balistiques. 
Fig. 3.3.1 : L'ordinateur M4M, qui sert de base au LG499. Les données de vitesse et de position sont fournies par la centrale inertielle LV300, qui utilise des gyroscopes KI79-119, et par le système optique 8KS. Celui-ci est constitué des capteurs optiques 279K, 280K (stellaire) et 281K (solaire), fournis par le TsNII Gueofizika [3]. 
Fig. 3.3.2 : L'une des cartes électroniques du système de contrôle des sondes Fobos. 3.4. Le système de télécommunicationsLe Complexe Radio Principal MRK (Магистральный Радиокомплекс), fourni par le RNII KP, est constitué de quatre systèmes [3] : 3.4.1. Le système radio (MRS) Il permet à la sonde de communiquer dans les deux sens avec la Terre. Il est constitué [3] : - de deux récepteurs de commandes ChA237 (772MHz) redondants, reliés aux antennes omnidirectionnelles - du récepteur ChA236, utilisé pour les mesures de trajectoires. Il peut fonctionner en mode centimétrique (5,01GHz), relié à n'importe quelle antenne, ou en mode décimétrique, relié à l'antenne omnidirectionnelle. - de deux émetteurs ChA235M (5,88GHz), qui peuvent être reliés à l'antenne directionnelle quand la sonde est en mode d'orientation trois axes, ou aux antennes omnidirectionnelles quand la sonde est en mode d'orientation sur un seul axe. - de l'émetteur ChA231 (926MHz), relié aux antennes omnidirectionnelles, utilisé pour les communications proches de la Terre. Cet émetteur peut être connecté à l'antenne semi-directionnelle pour conduire des expériences de diffusion des ondes radio. L'antenne directionnelle, placée au sommet de la sonde, offre un gain G≥600 dans un cône de 2°, et un gain G≥300 dans un cône de 3°. L'antenne semi-directionnelle offre un gain G≥10 dans un cône de 9,5° [3]. 
Fig. 3.4.1.1 : L'antenne directionnelle. Toutes les commandes envoyées par la Terre arrivent dans le boîtier MA212, qui les répercute ensuite au système de synchronisation. Les informations envoyées par la sonde passent par le boîtier d'encodage MA217. Elles peuvent être transmises à bas débit (128bit/s) et ne nécessitent alors aucun traitement. Pour augmenter le débit (jusqu'à 16384bit/s), il est nécessaire de les encoder [3]. 3.4.2. Le système de télémétrie (TMS) Les données télémétriques sont codées par mots de 8 bits, et dont émises par paquets de 1024 bits, c'est à dire de 128 mots. Le processeur MA215 envoie les informations vers la Terre sur trois faisceaux distincts : le premier est pour les informations analogiques et logiques, le deuxième uniquement pour les informations analogiques, et le troisième uniquement pour les informations logiques [3]. 3.4.3. Le système d'enregistrement et de traitement des données (SZVI) Le SZVI sert à stocker les données télémétriques et scientifiques avant leur transmission vers la Terre par le TMS. Il est constitué d'un boîtier de contrôle MA213 et de huit enregistreurs EA080. Les informations issues des instruments scientifiques peuvent également être stockées sur l'enregistreur Morion en attendant leur envoi vers la Terre [3]. 
Fig. 3.4.3.1 : L'élément de mémoire EA037-01, qui est utilisé dans l'enregistreur EA080. 3.4.4. Le système de synchronisation (PVS) Il reçoit les ordres émis par la Terre via le boîtier MA212 pour les répercuter sur les systèmes de la sonde, et émet aussi des commandes vers l'ordinateur de bord en fonction des programmes enregistrés à bord [3]. Le PVS comprend deux générateurs de fréquence avec une précision de 10-8 secondes, et de trois microprocesseurs redondants MA216, qui utilisent les circuits intégrés K588 produits à Zelenograd (technologie CMOS) [3]. 3.5. Les radars d'approcheLes sondes 1F sont équipées de deux radars altimétriques qui transmettent leurs informations au BUK. Ces radars sont fournis par l'entreprise UPKB Detal de Kamensk-Ouralski, où le chef de projet était A.G. BALO. 
Fig. 3.5.1 : Les radars Kometa et Vertikal. Le premier radar, baptisé Kometa, est utilisé pour guider la sonde lors de son approche de Phobos. Le second, baptisé Vertikal, est utilisé pour orienter l'antenne de communication [1]. Il fonctionne pour des distances allant de 800m à 60km [2]. Les sondes sont par ailleurs munies d'un altimètre à rayons gamma Orion fourni par le TsNII RTK. Il fonctionne dans une longueur d'onde de l'ordre de la nanoseconde [7], et est utilisé pendant le survol rapproché de Phobos [3]. 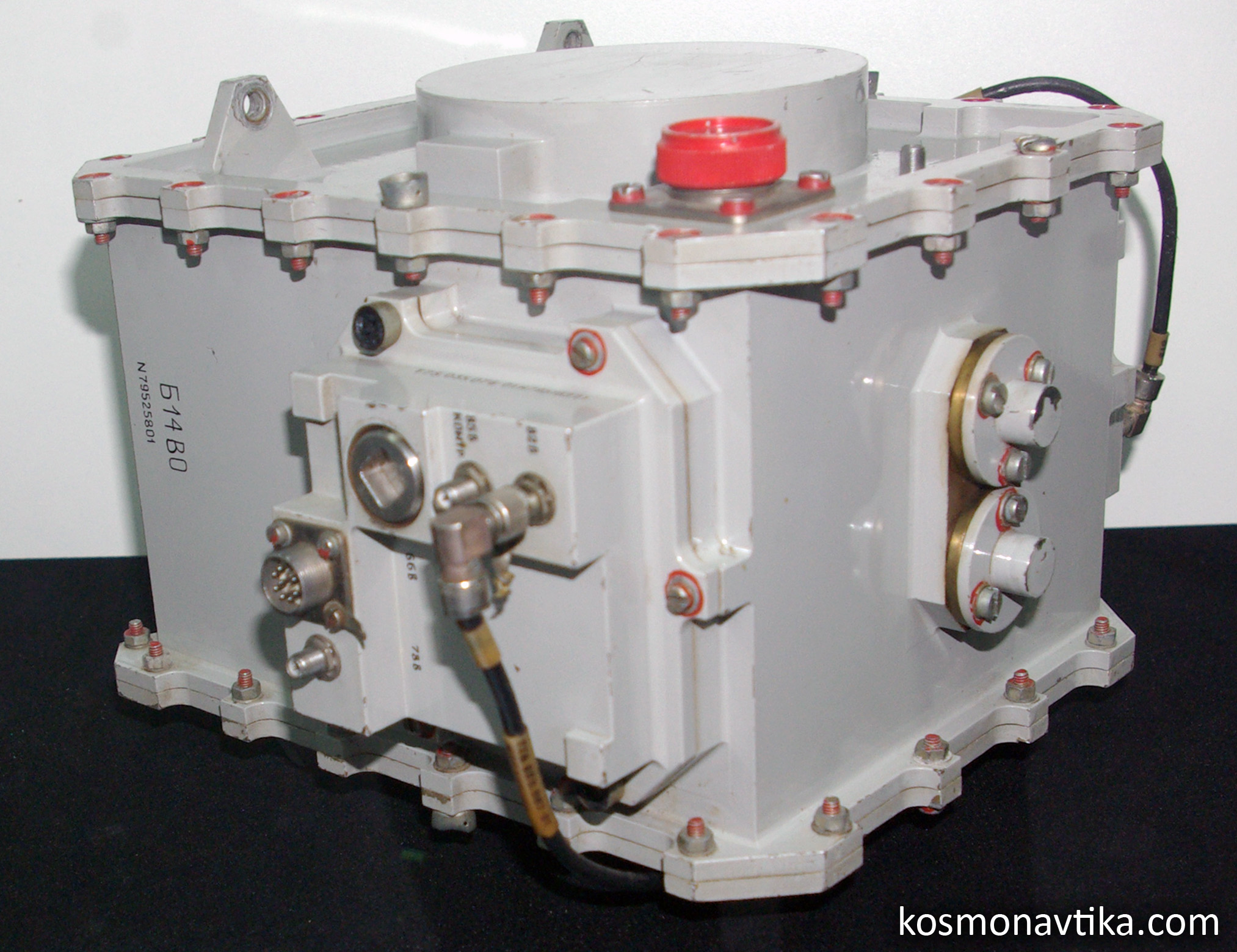
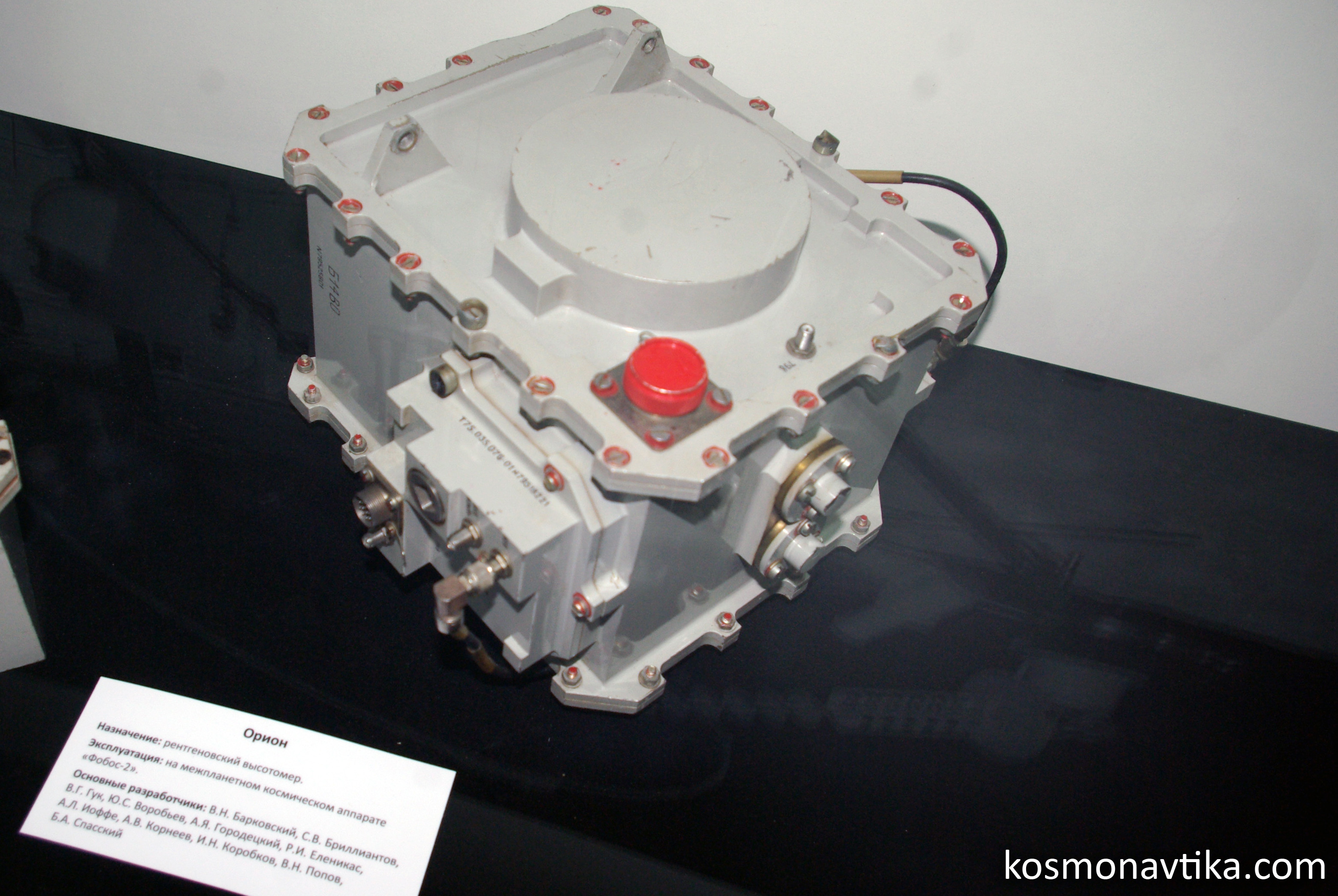
Fig. 3.5.2 : L'altimètre gamma Orion. 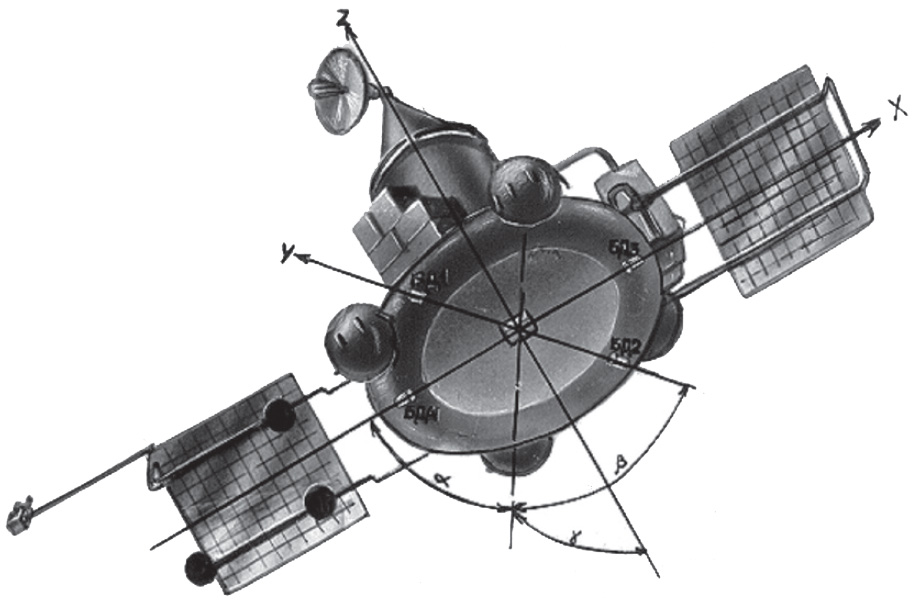
Fig. 3.5.3 : Principe de fonctionnement de l'altimètre Orion. 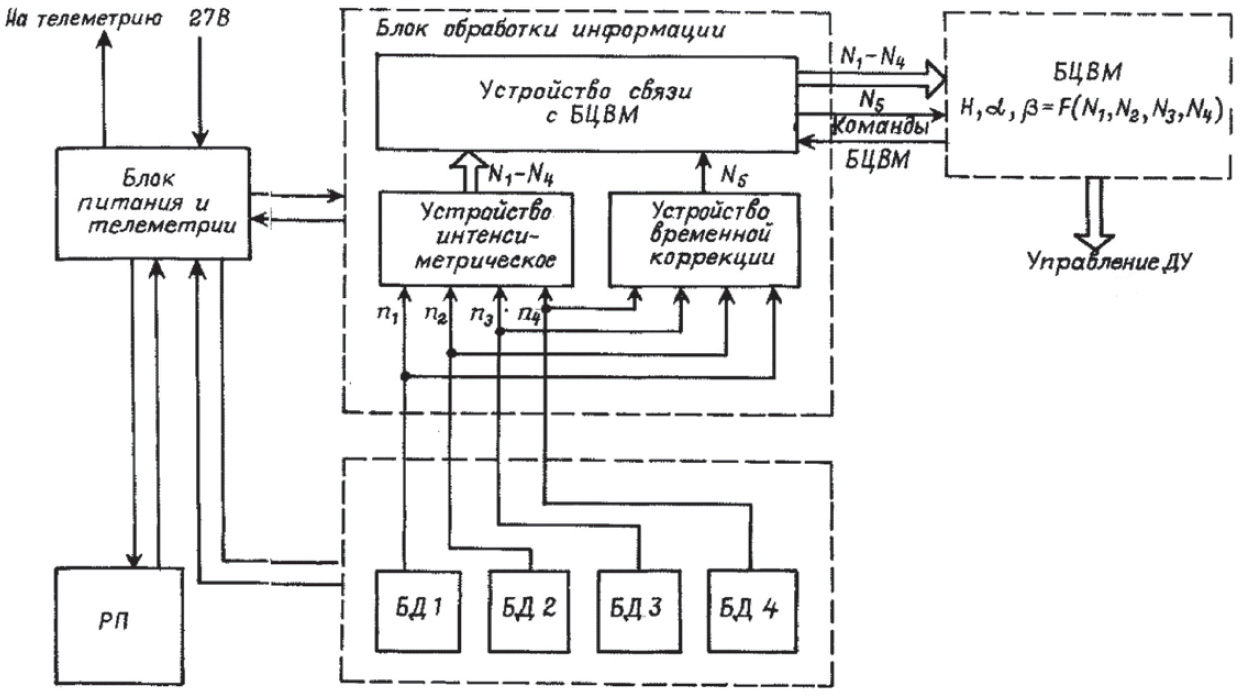
Fig. 3.5.4 : Schéma de principe de l'altimètre Orion. 3.6. Alimentation électriqueLa puissance électrique est fournie par des panneaux solaires. Ils permettent d'alimenter l'ensemble des consommateurs, et sont utilisés pour charger des accumulateurs NiH2. Ces derniers apportent un complément de puissance dans les phases où les panneaux solaires ne sont pas suffisants, et dans les phases non éclairées. Des batteries au lithium sont également utilisées [3]. 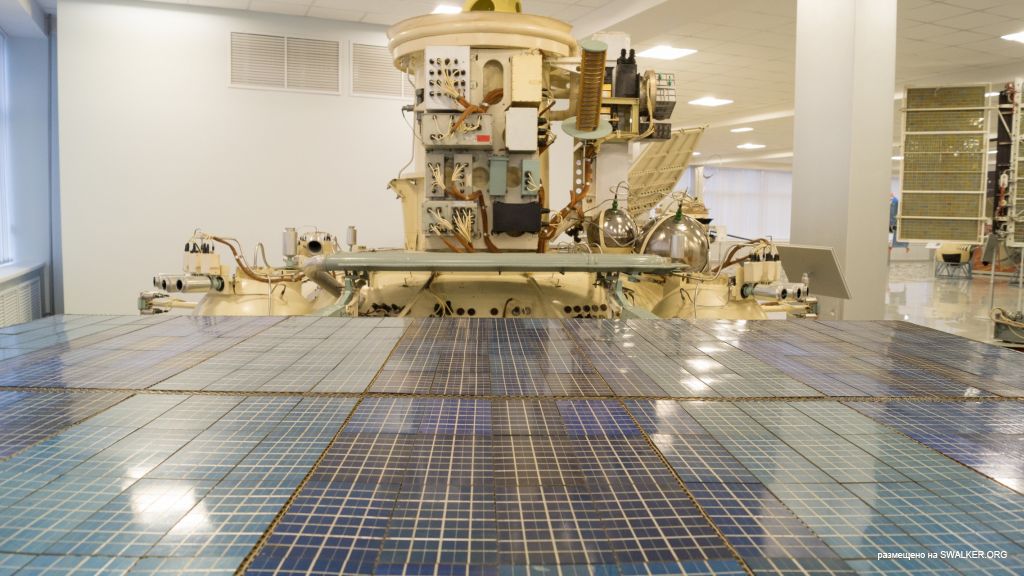
Fig. 3.6.1 : Un panneau solaire de Fobos. 4. Le segment solLes commandes des sondes Fobos sont émises depuis les stations d'Eupatorie et Oussouriïsk, équipées du système Kvant-D de l'OKB MEI. Bibliographie
[1] LYNDINE, I., Уральское утро космической эры, Ekaterinbourg, 2011 Dernière mise à jour : 19 juillet 2017 |
|
