Nauka | Descriptif technique1. GénéralitésLe Module Laboratoire Polyvalent aux caractéristiques d'exploitation Améliorées MLM-U (Многофункциональный Лабораторный Модуль с Улучшенными эксплуатационными характеристиками), ou 77KML, également appelé Nauka (« Science ») a été développé par le GKNPTs Khrounitchev sur la base des modules FGB des vaisseaux TKS. Il est mis sur orbite par un lanceur Proton-M (8K82KM) muni d'une coiffe (522GK) et auquel il est relié par un adaptateur (518GK) [2]. Il a une masse au lancement de 20257kg et, une fois totalement équipé sur orbite, il a une masse de 24200kg. Il offre un volume habitable de 70m3 et volume de 6m3 pour les équipements scientifiques [1]. 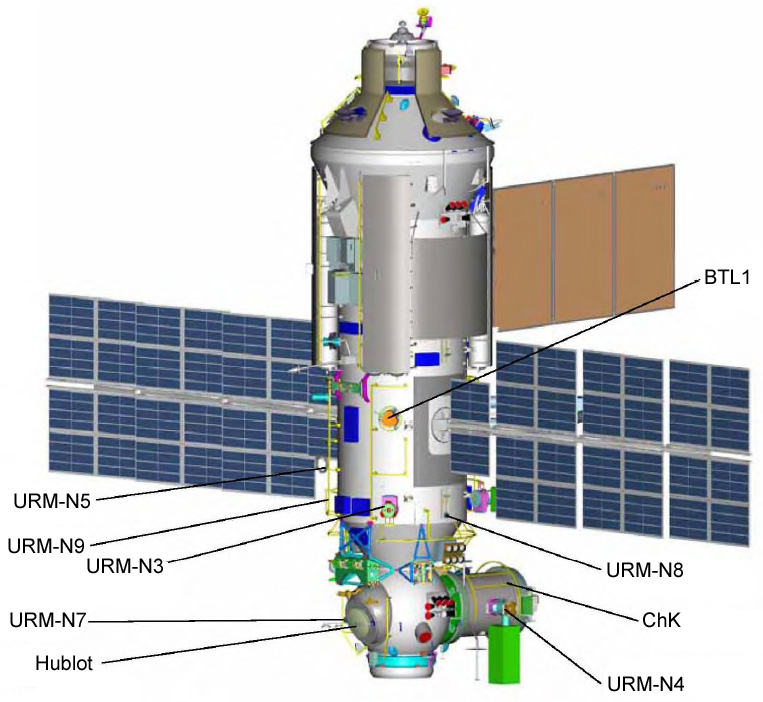
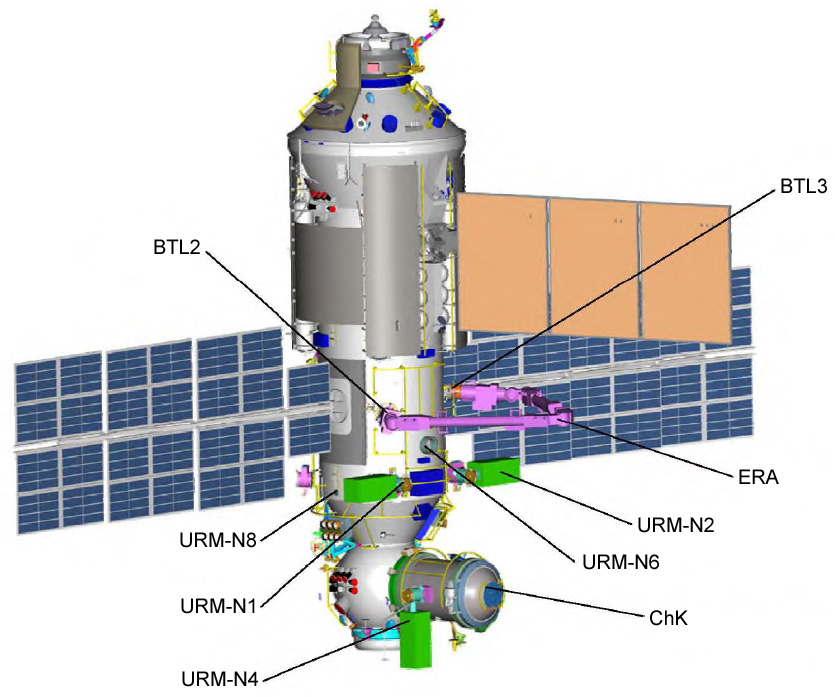
Fig. 1.1 : Schéma du module Nauka. Le module Nauka est constitué d'un Compartiment Hermétique des Instruments PGO, lui-même divisé en trois parties (PGO-1, PGO-2, PGO-3), ainsi que d'un Adaptateur Hermétique GA sphérique. Le PGO et le GA sont séparés par une écoutille. Le GA donne accès au sas ChK, d'une part, et à une petite coupole dotée d'un hublot d'observation, d'autre part. 

Fig. 1.2 : L'intérieur du GA. 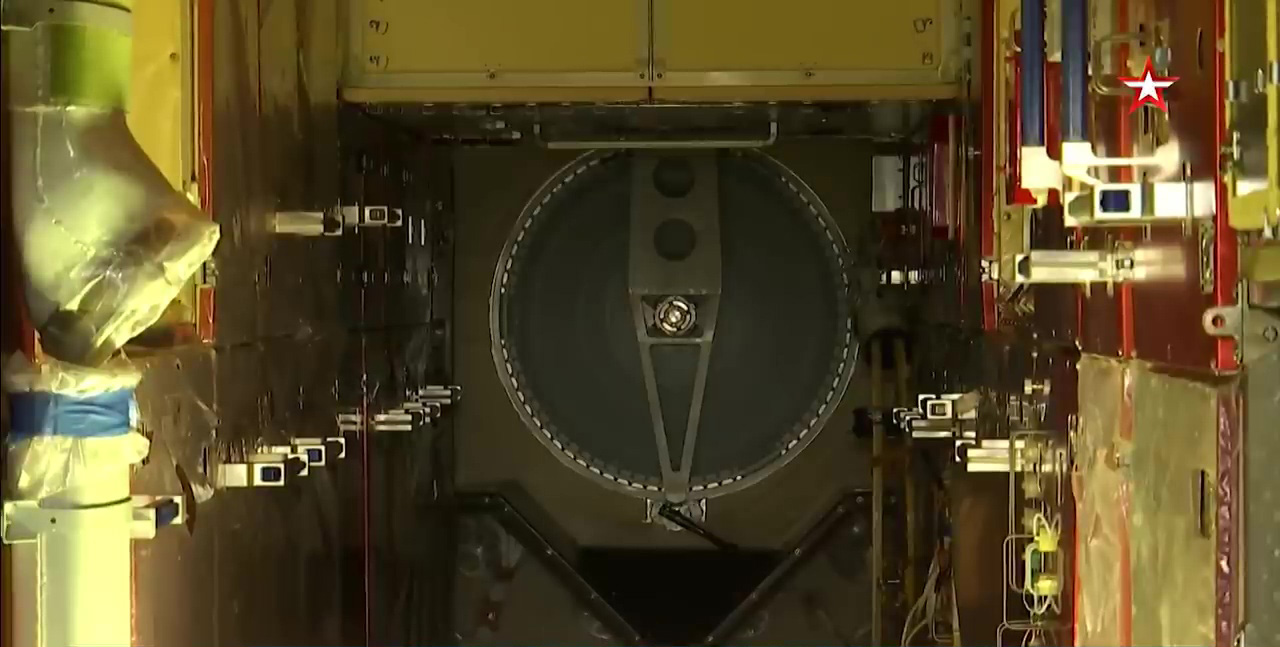
Fig. 1.3 : L'écoutille qui donne sur le GA, vue du PGO. 2. Système électriqueLe système électrique du module Nauka est basé sur deux panneaux solaires. Sur leur production totale, 2,5kW sont disponibles pour les équipements scientifiques [1]. Un radiateur permet d'évacuer la chaleur générée par les différents équipements électriques. Il a été lancé en tant que charge externe du module Rassviett qui a décollé à bord de la navette Atlantis STS-132 le 14 mai 2010. 
Fig. 2.1 : Fixation du radiateur sur Rassviett. 3. PropulsionLe système de propulsion de Nauka est en tout point identique à celui de Zaria, à ceci près qu'il ne dispose que de huit réservoirs au lieu de seize. 4. AmarrageLe module Nauka est muni de trois pièces d'amarrage :
- une pièce SSVP-M active sur le PGO, qui permet la jonction avec le PKhO de Zvezda, Les rendez-vous sont réalisés au moyen des systèmes Kours et TORU en secours. 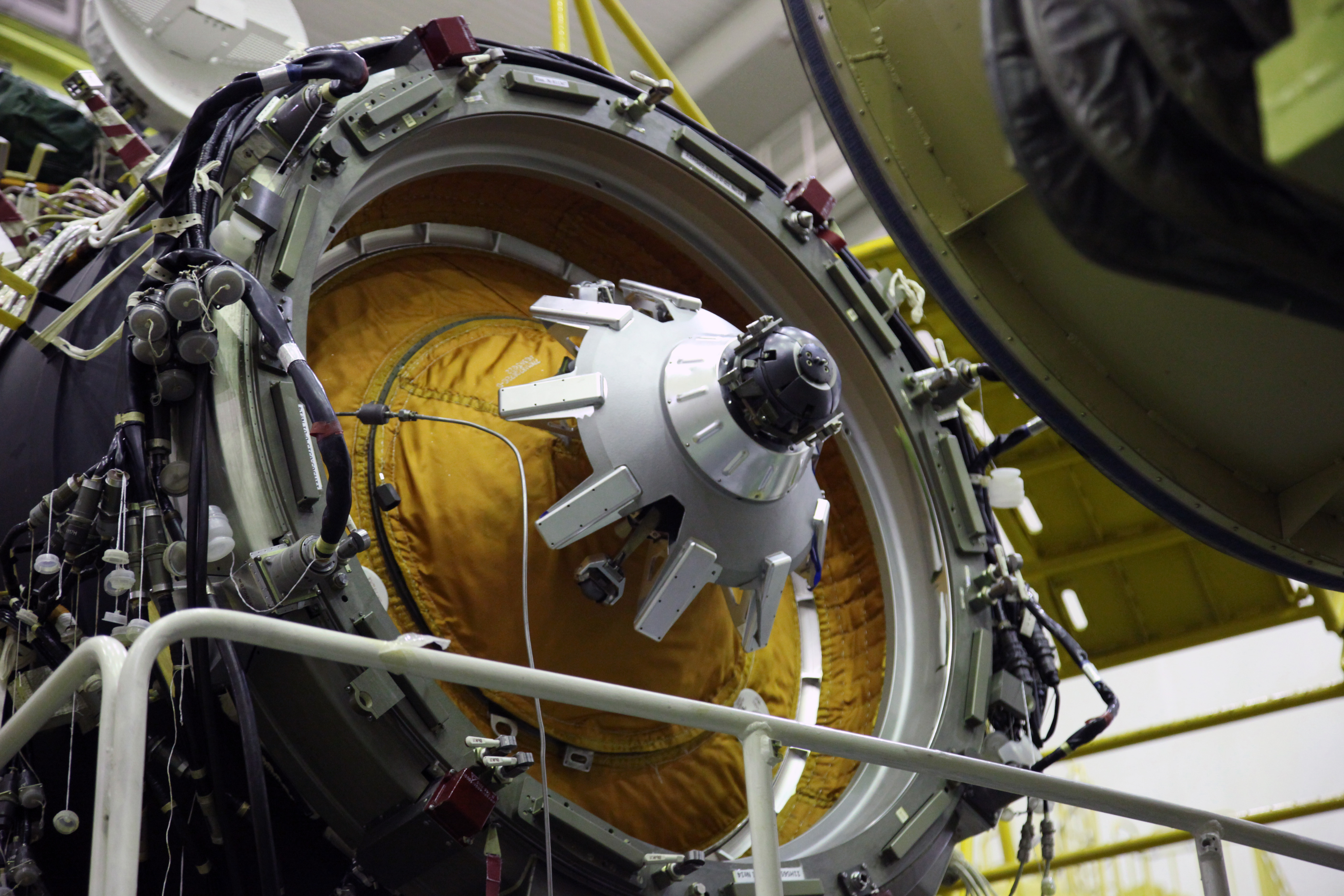
Fig. 4.1 : La pièce d'amarrage SSVP-M à l'arrière du PGO. 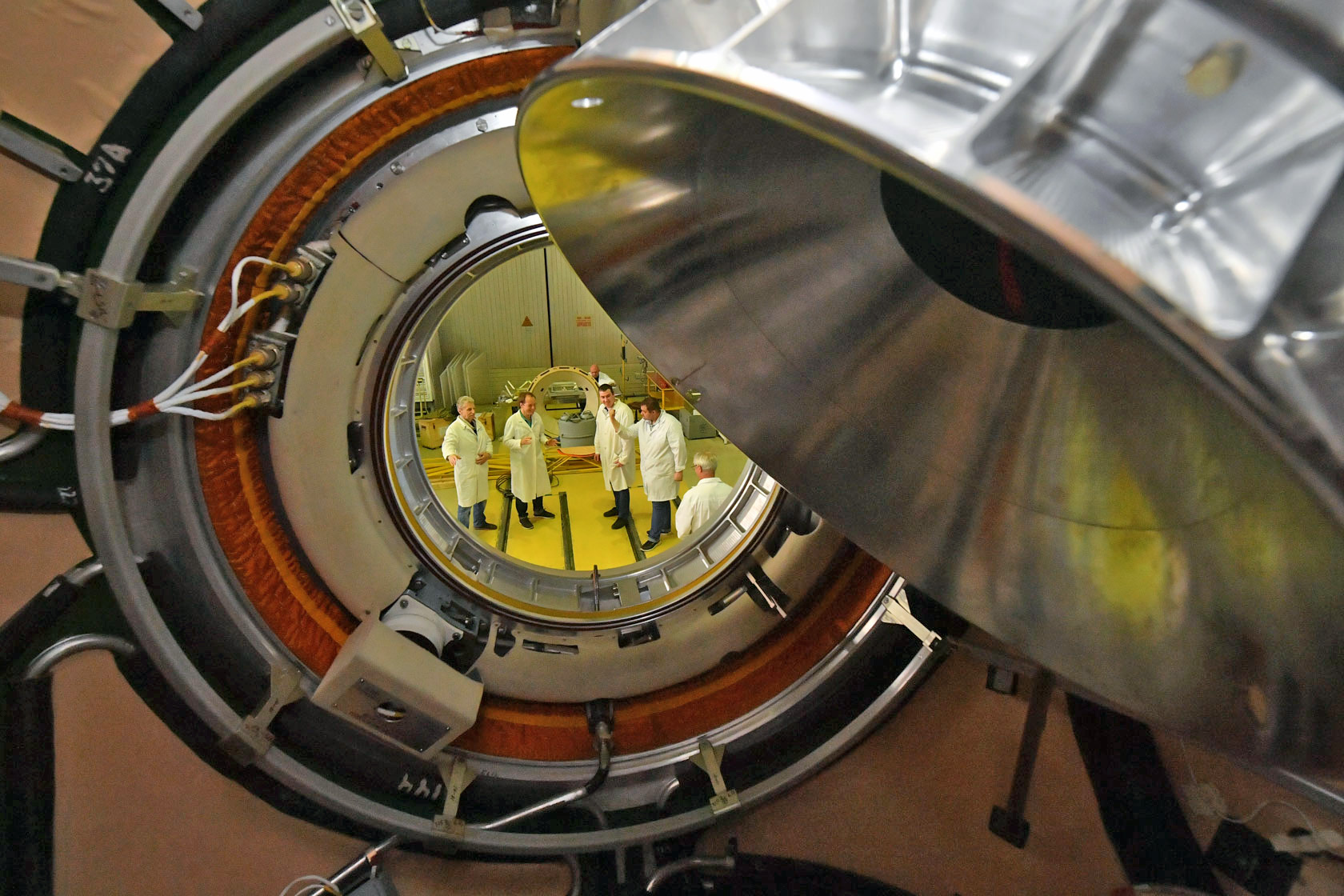
Fig. 4.2 : La pièce d'amarrage SSVP à l'avant du GA, vue de l'intérieur. 
Fig. 4.3 : La pièce d'amarrage pour le sas ChK. 5. Le sasLe sas ChK (Шлюзовая Камера) sera amarré sur le GA de Nauka et permettra d'exposer des charges utiles à l'environnement spatial sans avoir à réaliser de sortie dans l'Espace. Il a été envoyé sur orbite en tant que charge externe du module Rassviett qui a décollé à bord de la navette Atlantis STS-132 le 14 mai 2010. 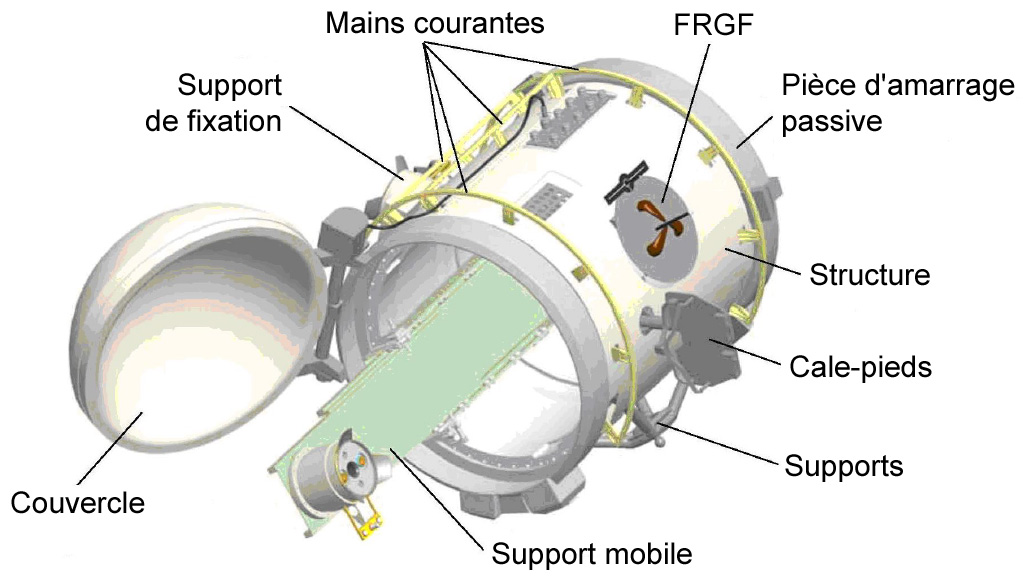
Fig. 5.1 : Schéma du sas ChK. Le ChK a une masse de 1050kg et un volume de 2,1m3. Il peut accueillir des charges utiles d'une masse maximale de 150kg et d'un volume de 1200x500x500mm. Il est doté d'un support mobile coulissant APPG (Агрегат перемещения полезного груза) qui permet d'extraire les charges utiles dans l'Espace. Le sas est conçu pour 200 cycles de dépressurisation, et la pression peut descendre jusqu'à 10-4mmHg [4]. 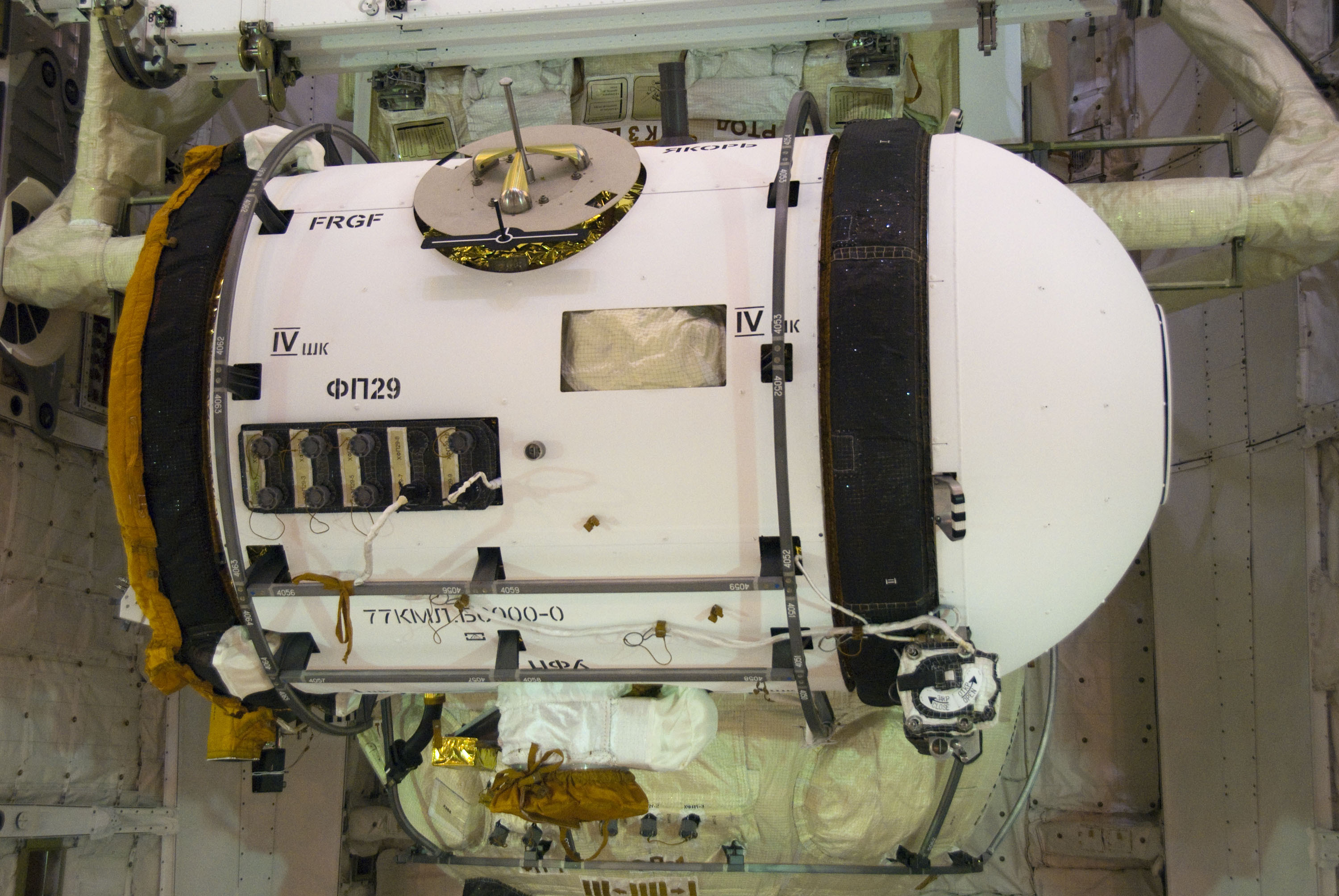
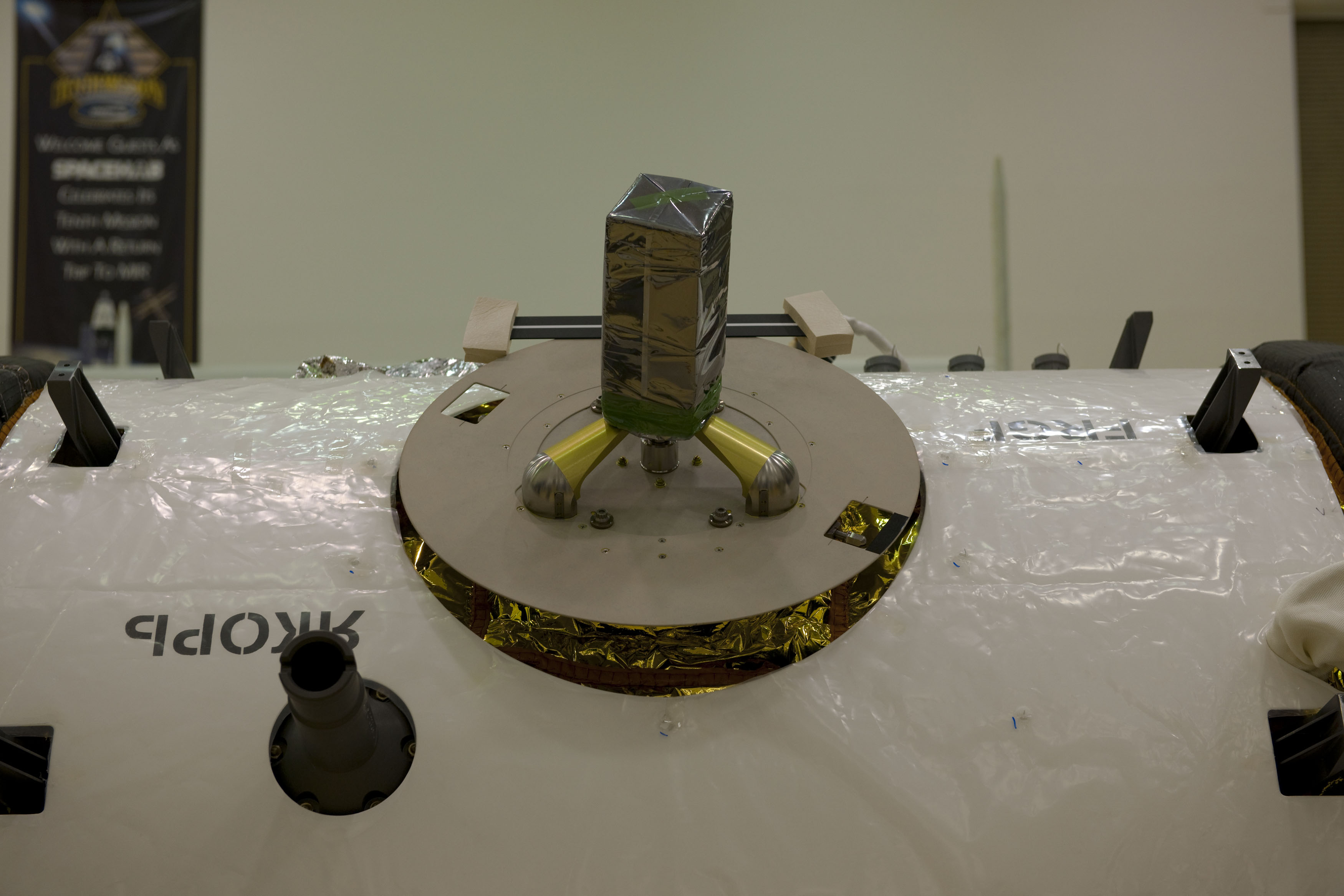

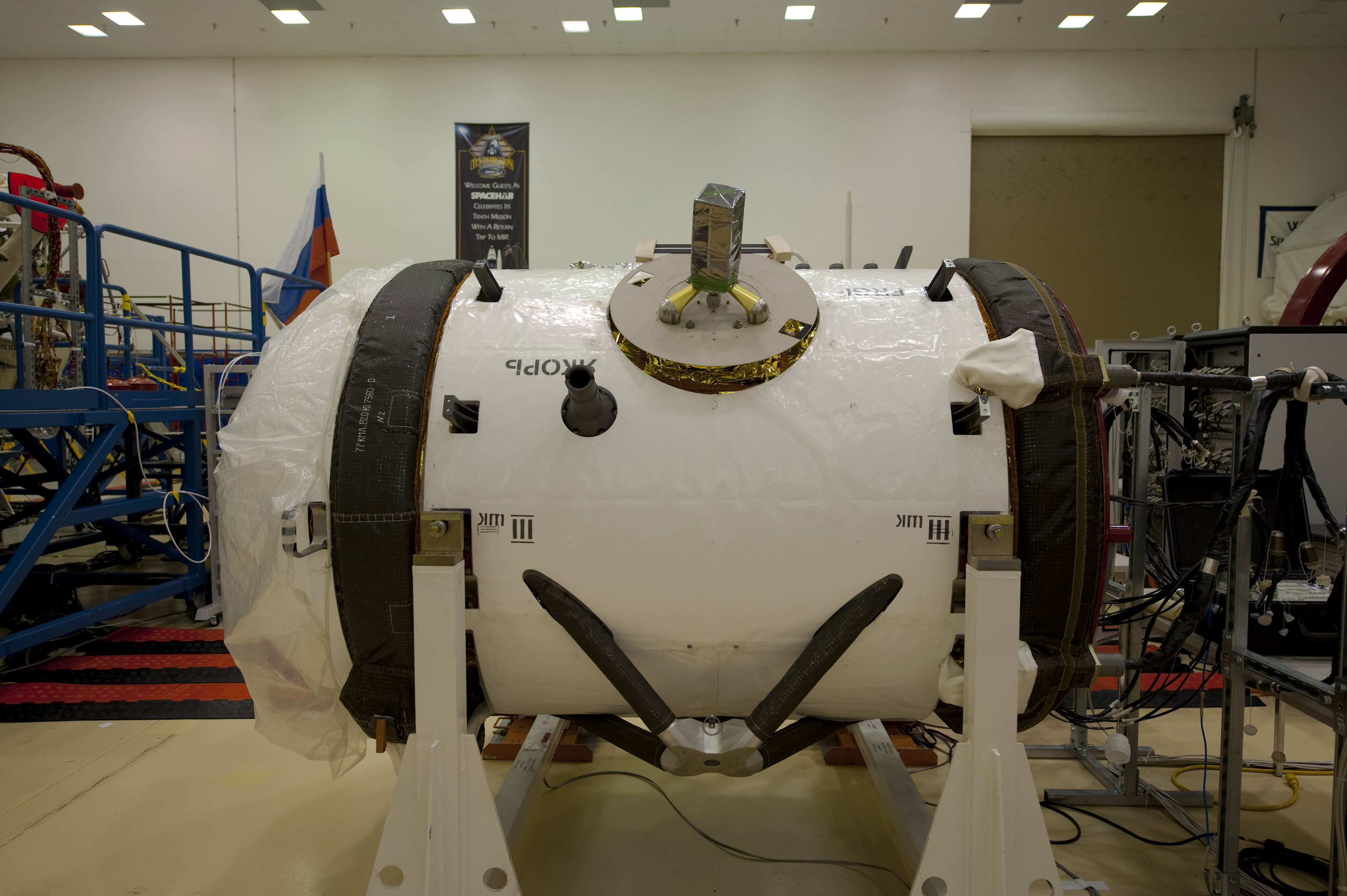
Fig. 5.2 : Le sas ChK en préparation en Floride. 6. Le bras ERALe bras manipulateur ERA (European Robotic Arm) est fourni par l'ESA qui en a confié la maîtrise d'œuvre à Dutch Space, qui est devenu Airbus Defence and Space Netherlands en 2014. ERA est constitué de deux segments reliés par une charnière motorisée, et munis chacun d'un embout à son extrémité. Il est conçu pour déplacer des charges avec une masse maximale de 8000kg. Il a une longueur totale de 11,3m, une portée de 9,2m, une masse de 630kg [5]. 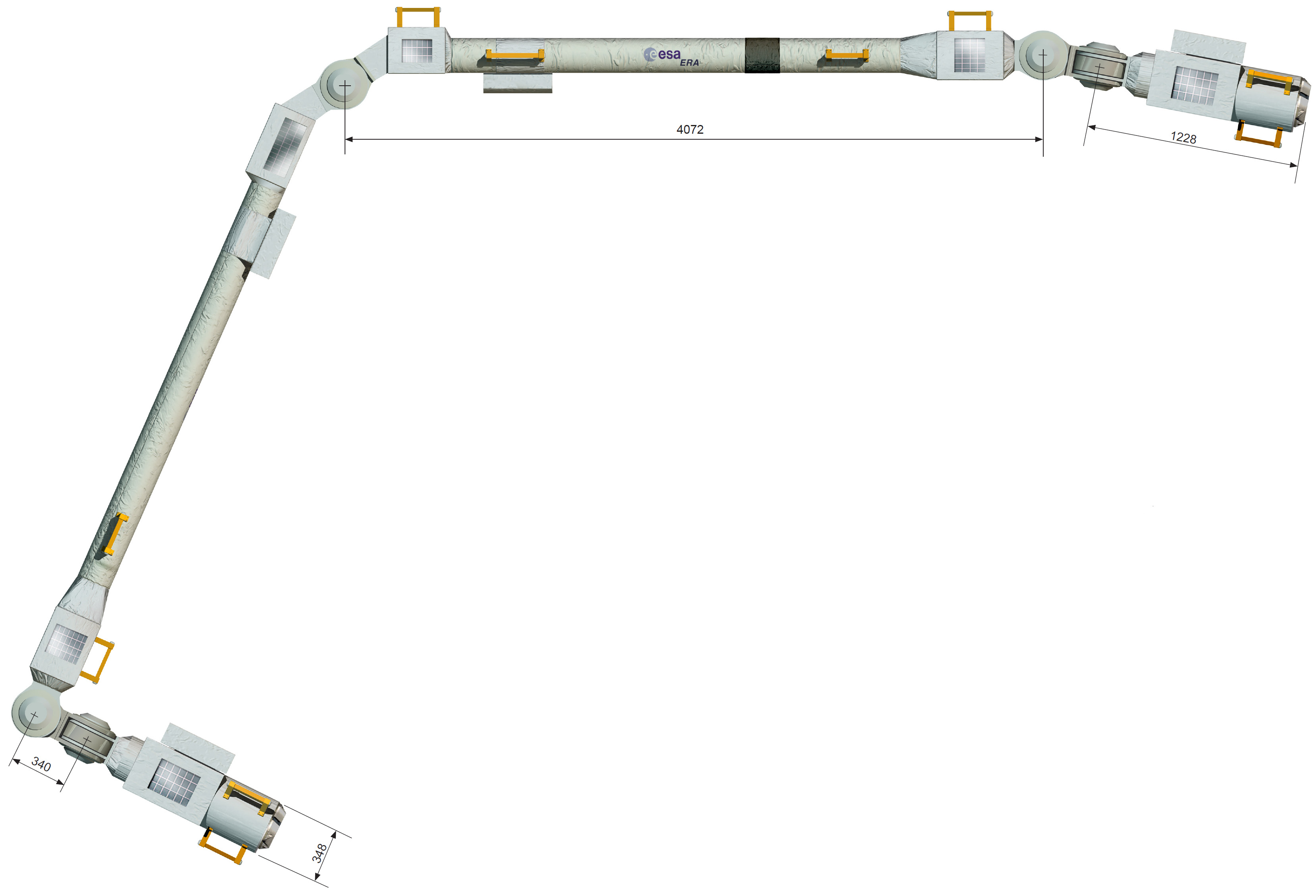
Fig. 6.1 : Schéma du bras ERA. Il peut se fixer sur les trois points d'ancrage BTL (Базовая Точка Лабораторная) disposés sur la paroi du module Nauka. 7. Equipements scientifiquesLe module Nauka dispose de seize points de fixation d'instruments scientifiques URM-V (Универсальное Рабочее Место) à l'intérieur de son volume pressurisé et neuf points de fixation URM-N sur sa paroi externe (cf. fig. 1.1) [4]. 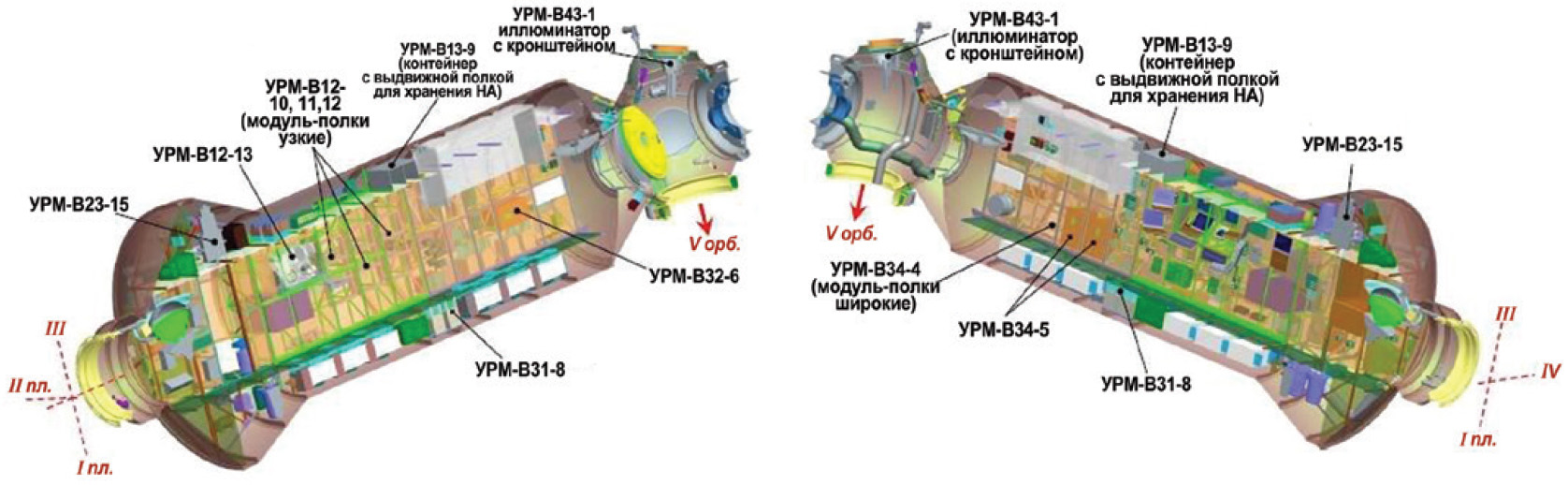
Fig. 7.1 : Emplacement de certains URM. Bibliographie
[1] Rapport annuel de RKK Energiya pour l'année 2019 Dernière mise à jour : 27 février 2021 |
|