L'embout de précision SPDMLe SPDM (Special Purpose Dexterous Manipulator), également appelé Dextre, est un système qui se place à l'extrémité du bras robot SSRMS et qui permet d'effectuer des tâches de précision. 1. GénéralitésLe SPDM a été apporté par la mission Endeavour STS-123 du mois de mars 2008. Il a une hauteur de 3,7m, une largeur de 2,37m et une masse de 1688kg. Lors des opérations, il peut consommer jusqu'à 2kW. L'embout SPDM comprend deux bras robotiques de 3,35m qui peuvent être pilotés indépendamment, mais pas simultanément, soit depuis le poste RWS de la station, soit directement depuis le sol (centre de Houston ou de Saint-Hubert au Canada). Chaque bras possède sept degrés de liberté. 
Fig. 1 : Schéma du SPDM. Le SPDM peut être saisi par le bras SSRMS car il est équipé d'un point d'ancrage PDGF, mais il peut aussi se fixer directement sur un PDGF du support mobile MBS, car il est aussi muni d'un embout LEE. Le SPDM est destiné à effectuer des tâches à l'extérieur de la station à la place des astronautes, afin de limiter le nombre de sorties dans l'Espace. Par exemple, il est capable de changer une batterie et de brancher des connecteurs. 2. SystèmesOTCMChacun des deux bras se termine par un mécanisme OTCM (ORU/Tool Changeout Mechanism), qui permet d'effectuer les tâches de précision. Les OTCM sont notamment équipés d'une petite douille qui permet de visser et de dévisser des boulons. 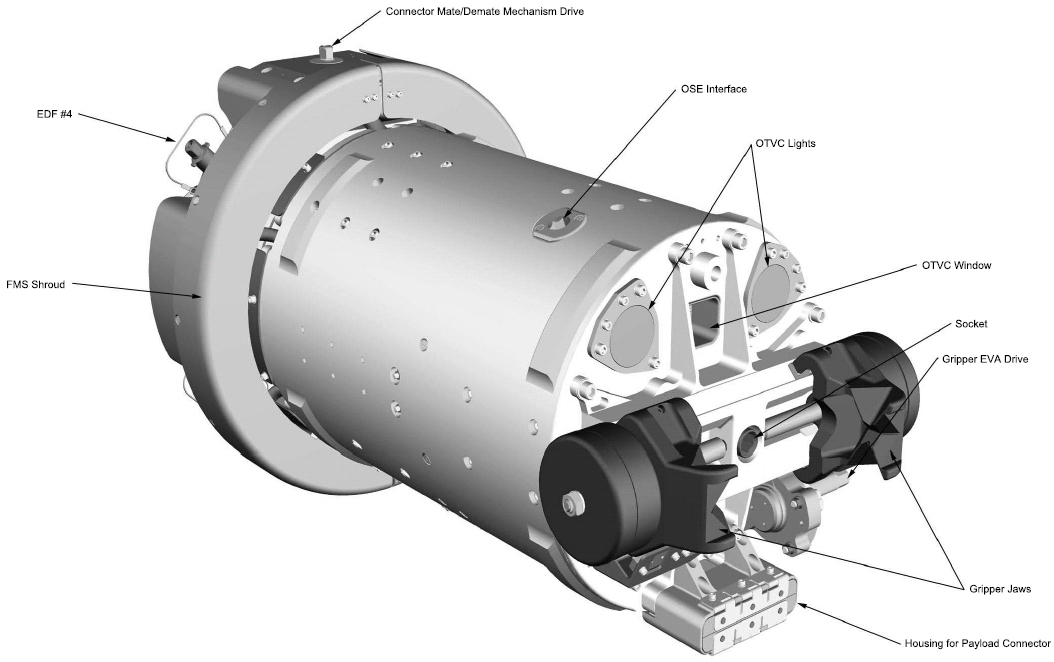
Fig. 2 : Schéma d'un OTCM. 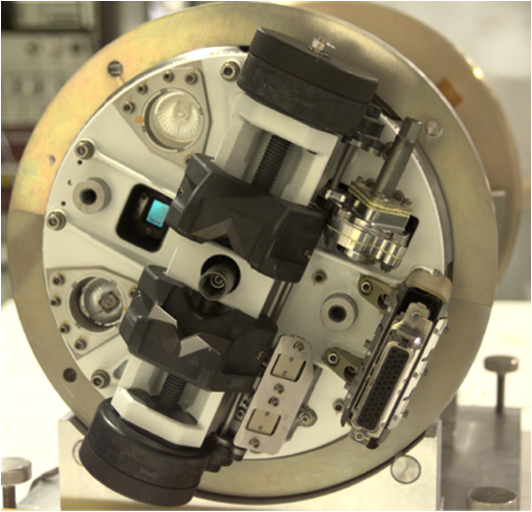
Fig. 3 : Un OTCM. OTPLe SPDM est également muni d'un élément appelé OTP (ORU Temporary Platform). Il permet de stocker temporairement une charge utile, ce qui permet de libérer les deux bras. L'OTP n'était pas présent lors du lancement, et il a dû être installé manuellement lors de la sortie du 17 mars 2008. Il a ensuite été à nouveau démonté lors de la sortie du 12 février 2010, et il a été stocké sur le segment S0. Le but était de le remplacer par un modèle amélioré, disposant de deux interfaces de type FRAM. Le nouvel OTP, appelé EOTP (Enhanced OTP) et pesant 191kg, a été installé lors de la sortie du 17 mai 2010. CLPALe SPDM est muni de deux ensembles vidéo CLPA (Camera, Light & Pan/tilt Assembly). Ils n'étaient pas présents lors du lancement et ont dû être installés lors de sorties dans l'Espace (17 mars 2008 pour le CLPA2 et 2 mars 2011 pour le CLPA1). THAPour certaines tâches bien particulières, le SPDM peut avoir besoin d'outils spécifiques. Quatre outils sont stockés sur un système appelé THA (Tool Holder Assembly), situé sur la structure principale. Le THA n'était pas présent lors du lancement du SPDM, et il a dû être ajouté lors de la sortie dans l'Espace du 17 mars 2008. 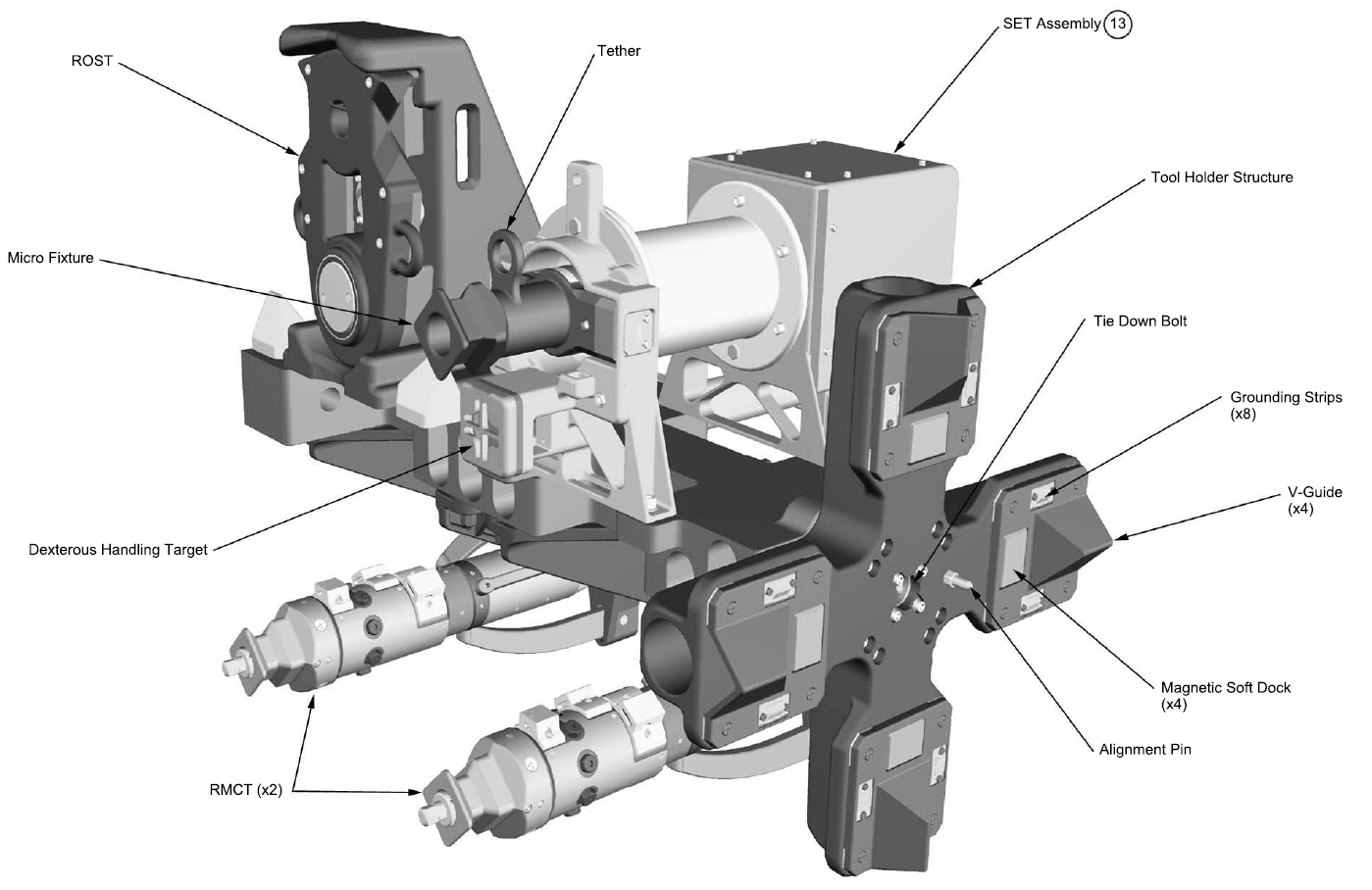 Fig.
4 : Schéma du THA. Bibliographie- Dossier de presse STS-111 Dernière mise à jour : 14 mai 2012 |
|